无人机自动化验电关键技术研究
2022-02-08东莞供电局变电管理三所周智明田旦瑜郑安然
东莞供电局变电管理三所 周智明 田旦瑜 郑安然 陈 庚
验电的目的是检验设备和线路是否确无电压,以防止带电装设地线或带电合地刀而发生严重事故。现行操作模式下,操作人员需要手持验电器先触碰带电设备,再触碰停电设备。由于高压验电器长度长,重量大,如果操作人技能水平不足,可能发生验电器倒杆,碰撞损坏设备。以500kV验电器为例,重量约3kg,展开长度接近8m,展开后由于工具重心上移,使用者需要远大于3kg的握力及臂力才能正常操作,不仅验电操作效率低下,而且具有较高的操作风险。为解决此问题,行业内研究了无人机验电装置[1],但在如何实现无人机自动化验电,尚存在研究空白。
1 无人机自动化验电难点
1.1 检测结果可靠性问题
验电的准确性与否,对后续操作的影响重大。在不考虑无人机的负重、功耗及飞行稳定性的前提下,携带接触式验电器验电可以获取较为可靠的结果。实际应用中,接触式验电需要控制机载的验电触头触碰带电导线,而大部分高压导线的半径小于4cm,因而对无人机飞行精度要求极高。民用无人机在使用高精度的差分卫星导航的情况下,至少仍有2~3cm的误差。此外高压场地内的空间电磁场对无人机定位系统也会有无法忽略的影响。因此,在不附加其他辅助定位手段(如增加二维码)的情况下,接触式验电实现难度较大。
非接触式验电对无人机航行的精度要求不高,可以回避定位精度的问题。在非接触验电模式下,验电传感器测量数据的准确性是影响验电可靠性的关键因素,目前已有一些非接触验电方向上的研究[2]。
在其他研究中,提出了接触式验电与非接触式验电组合的方案,但沉重的集成验电装置会影响无人机的灵活性,其可行性有待验证。
本项目基于非接触验电的技术路线,在检测装置的开发上,深入研究带电设备与停电设备的空间电气物理特征,提出一种集成电场、磁场与超声波局放检测的非接触式验电装置。在验电方法上,采用过程检测的方式,对飞行过程的中的空间电气量进行实时采集与分析,具有更高的可靠性。
1.2 双编校验问题
验电无人机的开发仅解决了工具问题,但其验电过程仍然需要人工控制。要实现无需人工介入的无人机的自动化验电,必须解决双编校验的问题,即确保所检测的对象是下令人员所期望的对象,并能反馈核对结果。

图1 验电作业核对双编流程
为解决该问题,在验电之前,可命令无人机飞抵待验设备的双编标识牌处拍摄设备双编照片后,进行图像识别提取双编内容,通过比对操作指令中的设备双编完成校验。但是,在双编核对完成后,无人机飞往待验设备的验电部位的过程中,无法判断航线是否偏移,故此方法仍无法保证检测对象为期望检测设备。
本项目结合前述空间电气量检测的方法,提出核对飞行检测航程首末两端空间坐标的校验方法,通过计算采集点首末两端的空间坐标与检测对象坐标之间的距离,反映采集数据的过程是否确在检测对象周边来判定检测结果的可靠性。
1.3 作业流程管控问题
验电作业时必须遵循先到带电设备上检测设备有电,确认验电装置正常,再到停电设备上检测设备无电的作业流程。无人机的航迹规划技术是解决此问题的可行手段。综合应用三维建模与卫星导航技术,复合设备布局信息以及远程遥感信息以获得全面的无人机飞行现状以及环境信息。按照特定航迹规划方法,动态制定最优或次优路径,并且能够检测航线的可安全通过性。定制的适应性验电航线应能够实时分析作业航线的约束条件,即无人机的每一步行动均应根据双编核对结果、验电器功能检测结果而进行选择。此外,在航线规划阶段,适应性验电航线还要能够正确选择相邻带电设备,避开已停电的设备。
2 无人机自动化验电技术
本方案提出一种基于高精度复合电气量的变电站三维模型,以及检测空间电气变化量的无人机验电装置构成作业系统,通过虚拟双编校核与无人机航线智能动态规划来实现无人机的自动化验电的方法。
2.1 基于空间电气变化量的无人机验电装置
基于空间电气变化量的无人机验电装置(以下简称“验电装置”)是本技术方案的采集判据主要技术手段。本技术方案中的验电方式,是一种以“磁场、电场、局放”三项电气量(以下简称“检测量”)的空间变化量特性来区分表征的非接触式验电手段。无人机机载的检测装置测量电气量后,实时传值至地面端算法器综合计算后,输出线路带电情况结果。
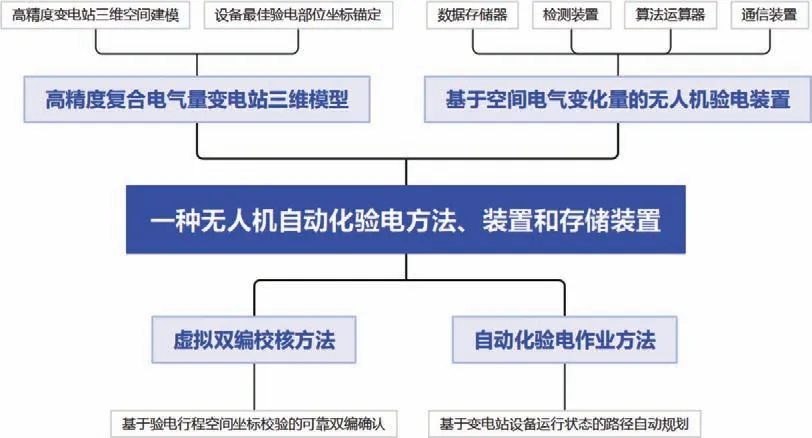
图2 无人机自动化验电系统框架
验电前,首先获取待验电设备的最佳验电部位。每个验电部位应为一段验电无人机逐渐靠近待验设备的航行行程。
验电时,在无人机验电部位航行行程上,检测装置高频地采集行程上各位置的电场,磁场以及局放量。在行程末段,将连续测得的数值传递至后台系统,由运算器计算数值变化情况,若数值均呈现减小趋势,则检验结果为无电,若数值呈现增大趋势,则检验结果为带电。检验判据结果应如下:

上述检验公式中,E为电场场强,H为磁感应强度,dB为SDT超声波采集仪测量的声波强度,S为无人机空间中的坐标位置。检验指标随变电站设备现场情况不同而变化,通过理论计算与现场实测的方式确定合适的Δ1、Δ2、Δ3,作为验明无电的证据。
为减轻无人机负重,机载验电装置不负责进行数据处理,只进行数据采集及存储转发,由通信模块发送至地面控制主站进行作业进程的管控、双编核对与数据运算。
2.2 高精度复合电气量变电站三维模型
为了使前述验电无人机可以在空间内按作业进程控制程序来执行任务,须建立高精度复合电气量的变电站三维模型(以下简称“模型”)。
首先通过倾斜摄影或激光扫描等各种手段建立变电站的空间三维模型。然后结合运行经验与理论计算,在空间模型中锚定各设备的最佳验电部位,标定的最佳验电部位应符合以下要求:
一是应为验电无人机一段直线航线,以航程的首末坐标Si[(xi,yi,zi),(xi+1,yi+1,zi+1)]表示;二是最佳验电部位需考虑设备周边环境情况及待验设备与其他设备的距离;三是为避免线路相间短路,对于三相线路的边缘相验电应从外侧逐渐靠近线路;四是中间相应从上方逐渐往下靠近线路;五是全站任一可能需要验电的设备均应预设置验电航程Si。
进一步在系统内收集标定的全量设备最佳验电部位组合形成数据库,并对任一最佳验电部位关联周围相同电压等级设备的最佳验电部位形成关联组[Si-1,Si,Si+1],形成最佳验电部位的逻辑组合,用于实现“先验带电设备,再验停电设备”的路线规划。为避免待验设备周围设备停电检修的影响,因此每一最佳验电部位需关联至少两个周围设备。
形成验电部位数据库后,使用前述验电无人机,对变电站内每一设备的最佳验电部位的电场、磁场及局放进行初始检测,并将初始检测数值一一对应地关联至模型中的各验电坐标上,以便后续应用。通过以上措施,形成高精度复合电气量的变电站三维模型。
2.3 虚拟双编核对方法
本方案提供了一种基于三维空间坐标运算的虚拟双编校核方法。在控制主站内通过人工智能语义分析或点位映射关系,使验电管控系统获取调度操作指令或操作票并中的待验电设备双编。在前述模型内根据待验电设备双编检索各目标最佳验电部位S[(x0,y0,z0),(x1,y1,z1)],并规划航线指挥无人机开始验电。
无人机到达航线规划的期望验电部位的起始点S(x0,y0,z0)时,无人机将实时坐标Si(xi,yi,zi)反馈至管控系统进行虚拟双编比较,当坐标满足Si-S0<k时,表明双编校核正确,开始执行验电操作;当坐标不满足上述条件时,表明无人机处在非期望位置,航线出现偏移,指挥无人机结束验电操作,并反馈“验电操作异常”告警。
正常验电操作时,无人机到达航线规划的期望验电部位的末端点S(x1,y1,z1)时,无人机将检测数据反馈至后台运算器的同时将实时坐标Si(xi,yi,zi)反馈至管控系统进行虚拟双编比较,当坐标满足Si-S1<k时,表明双编校核正确,测量结果可信;当坐标不满足上述条件时,表明无人机所验部位的行程非期望行程,测量结果不可信,应结束验电操作,反馈“验电操作异常”告警。本方法可以检验实际验电设备与期望验电设备是否一致,保证验电结果的可靠性。
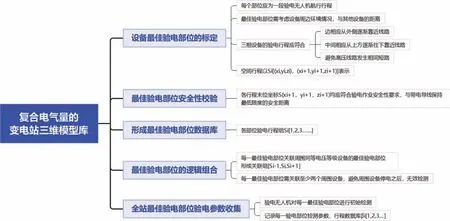
图3 复合电气量变电站三维模型
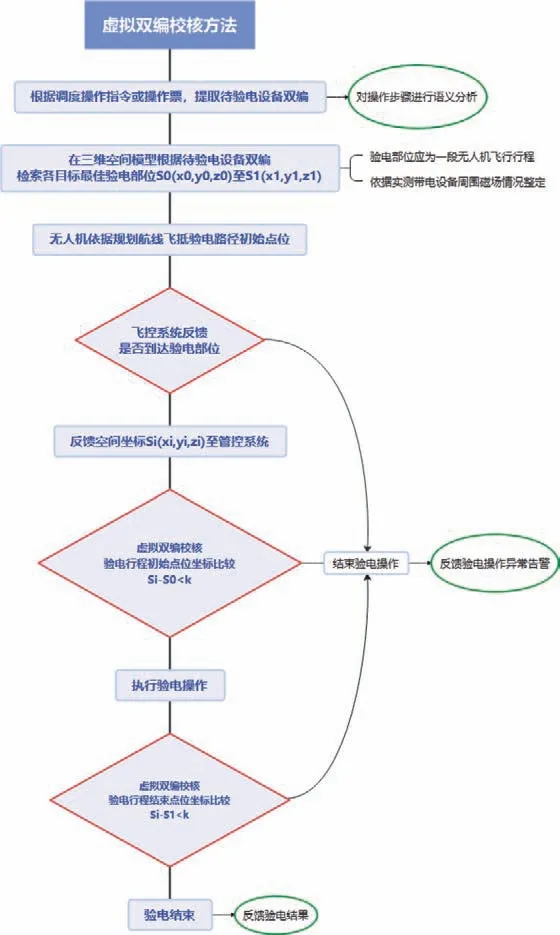
图4 虚拟双编核对方法流程
2.4 无人机自动化验电作业方法
本方案提供一种通过地面控制主站来动态控制无人机动作实现无人机自动化验电方法。首先通过人工智能语义分析,获取调度操作指令或操作票并从中提取待验电设备双编。然后调用前述高精度复合电气量变电站三维模型中的数据,获取待验设备的最佳验电部位及其关联的周边带电设备最佳验电部位关联组[Si-1,Si,Si+1]。为了避免出现周围设备同时停电,无法检测验电装置工况的情况,控制主站结合变电站监控系统获取设备带电信息,排除停电检修设备;当相邻两个设备都符合带电条件时,通过最优航线算法计算出最佳带电设备。最优航线制定应满足以下要求:
一是路径包含停机坪、待验停电设备、待验带电设备;二是路径闭环检测:检验起始点与返还点闭合;三是路径安全性校验:检测路径与所有带电设备保持足够的安全距离;四是路径通过性校验:检测路径上无任何物体阻挡。
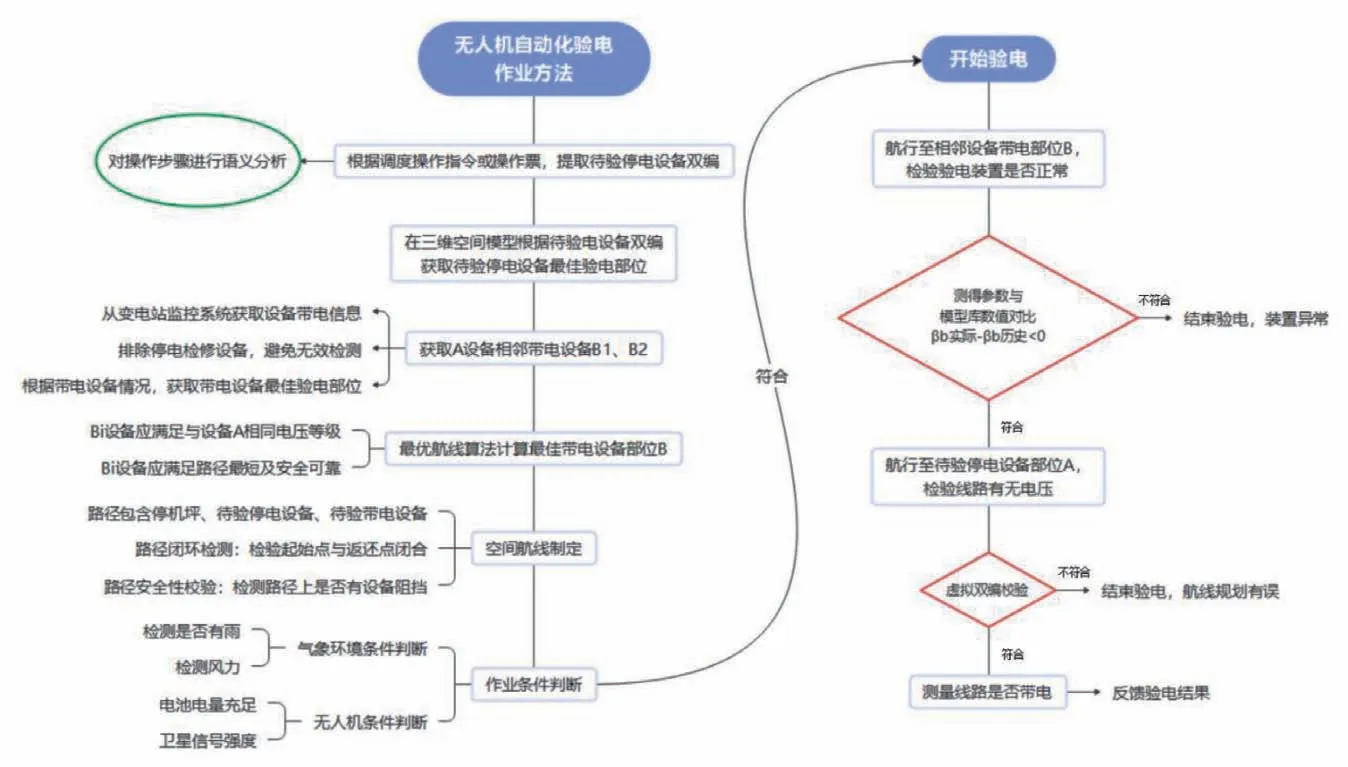
图5 无人机自动化验电作业方法
航线制定完毕后,管控平台应进行作业条件判断。利用停机坪及气象站硬件,检测雨量、风力并获取无人机电池电量及卫星信号强度,条件不符合时,暂缓验电作业。当条件满足时,开始验电。
首先,管控平台指挥无人机航行至相邻设备带电部位B,使用非接触式验电装置测量带电部位最佳验电行程的电场,磁场与局放超声波,以βB表征三项检测结果数组并通过通信模块反馈至主站计算器,比较实测βB与前述高精度复合电气量变电站三维模型中的记录的初始电气量相比较,当差值符合条件时,证明验电装置正常,可以进行下一步操作;当差值不符合条件时,证明验电装置异常,结束验电并反馈“装置异常”告警。
然后,管控平台指挥无人机航行至待验停电设备部位A,使用前述虚拟双编核对方法,核对无人机验电设备双编符合操作指令要求。双编核对符合条件后,利用前述第1点中的无人机非接触式验电设备,进行停电设备的验电操作,通过管控平台运算器计算设备空间电气变化量,得出设备验电结果。若双编不符则结束验电,反馈异常信息并等待操作人员处理。
3 结语
本项目研究了非接触式无人机验电装置、三维空间建模及航线规划技术的集成性创新应用,针对无人机自动化验电的技术瓶颈,提出了可行的解决方案。使用无人机非接触式验电系统替代人工操作验电,节省大量操作时间的同时,可有效降低操作的风险。通过无人机程序化验电作业管控系统与操作指令系统的对接,可实现作业流程的自动化执行,并将检测结果返回操作端,实现验电作业全流程的机器替代,大大提高验电效率。项目研究成果适用于变电站自动化验电作业场景,扫除限制程序化接地操作的最后一环,有助于深化电网程序化操作。
