垂直回收火箭可伸缩着陆腿展开的动力学仿真分析
2022-02-07胡鹏翔徐珊姝张宏剑张津泽
胡鹏翔,王 檑,徐珊姝,张宏剑,张津泽
(北京宇航系统工程研究所,北京 100076)
0 引言
着陆缓冲机构是垂直起降运载火箭研制的关键技术之一[1-3]。蓝色起源公司的New Shepard火箭和太空探索公司的Falcon 9火箭目前均已通过着陆缓冲机构实现了箭体子级的垂直软着陆及回收模块的再次发射,开启了重复使用运载火箭研制的新纪元。New Shepard火箭采用的是平行四边形式可折叠着陆腿,而Falcon火箭研制的是倒三脚架式可伸缩着陆腿,详见图1。比较而言,后者的着陆稳定性优于前者,尤其是在一条腿以一定的侧向速度单独先触地的情况下。Falcon火箭在陆上及海上的多次成功垂直回收,也展示了倒三角架式可伸缩着陆腿的强大适应性。

图1 Falcon火箭着陆腿
用于运载火箭垂直回收的可伸缩着陆腿机构的工作原理见图2。通常在回收子级的尾段安装4组相同的被动展开式着陆腿。在展开指令发出前,锁定装置将收拢状态的着陆腿牢牢固定于预定位置;解锁指令发出后,各组着陆腿主要在轴向过载作用下展开,可伸缩主腿的各腿节向外滑动,视加速度产生的势能转换为着陆腿展开的动能。直至展开完全到位时刻,主腿各腿节被锁定,各组着陆腿机构变为倒三脚架结构,为后续着陆做好准备。展开到位锁定时刻,着陆腿相对箭体的运动速度将因冲击而骤降为零,必将产生展开冲击载荷作用于支腿和箭体连接部位。
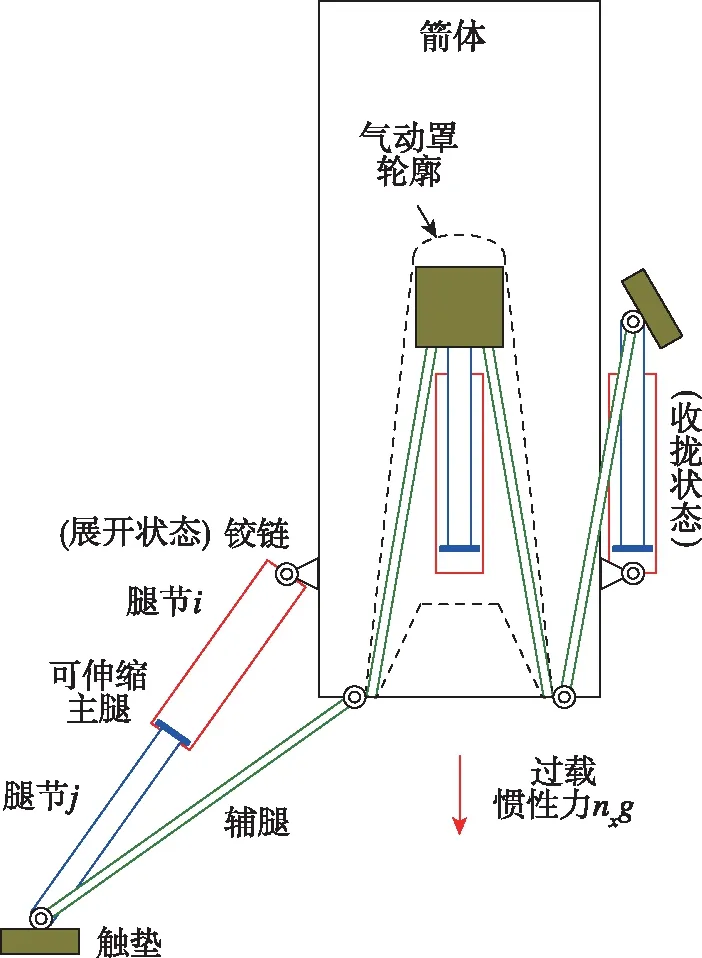
图2 垂直回收火箭可伸缩着陆腿的工作原理
垂直回收火箭着陆腿设计主要面临展开和着陆两个动态工况。目前,国内外已发表的学术文献中涉及火箭着陆腿展开及着陆动力学的研究十分少见[4-5]。火箭着陆腿着陆过程涉及的动力学问题与月球探测器着陆没有本质区别,主要焦点在于设计吸能材料/装置来耗散冲击能量以实现软着陆。针对月球探测器着陆冲击的文献比较多[6-13]。
垂直回收火箭可伸缩着陆腿展开过程的关注焦点有两个:1)支腿能否正常展开?主要解答垂直回收箭体在什么条件(过载、垂向速度、高度等)下发出解锁展开指令,以确保支腿展开的可靠性;2)能否承受展开冲击载荷?主要关注展开到位锁定时刻支腿及箭体结构能否承受相应的冲击载荷。火箭着陆腿展开与月球探测器支腿展开存在本质区别,后者的支腿仅展开一个很小的角度,收拢只是为了在起飞发射阶段保持与火箭整流罩之间的安全间隙[14]。而且,月球探测器支腿展开是在在轨阶段完成的,处于失重状态(视加速度为零)。
我国在火箭垂直回收方面起步较晚,尚未付诸飞行任务开展工程实施。为了给工程研制提供参考,本文基于多体动力学方法建立垂直回收火箭可伸缩着陆腿的虚拟样机模型,并对展开动态过程开展动力学仿真分析。定性上分析,着陆腿展开过程与支腿的结构柔性(尤其是细长辅腿)、腿节相对滑移摩擦力、气动罩气动力及过载等因素有关。支腿能否展开到位可用展开到位所用时长来表征,而展开冲击可用展开到位时刻支腿角速度来衡量。通过研究支腿柔性、腿节滑动摩擦力、气动罩气动力、过载等对展开时长和展开到位角速度的影响规律,可为垂直回收火箭可伸缩着陆腿展开方案的设计提供参考。
1 可伸缩着陆腿机构的多体动力学建模
单组着陆腿相对箭体展开的多体动力学模型如图3所示,包含箭体、1条多节主腿、2条辅腿、1个气动罩以及1个触垫。展开过程中,气动罩随辅腿同步运动,同时产生作用于辅腿上的分布式气动力;辅腿相对比较细长,因此可根据有限梁段方法[15-16]将辅腿建模为柔性体。主腿各腿节主要承受轴向力,且主腿直径明显大于辅腿,各腿节长度相对较短,因此可将主腿各腿节建模为刚体。触垫和箭体展开过程中主要体现质量效应,均建模为刚体。
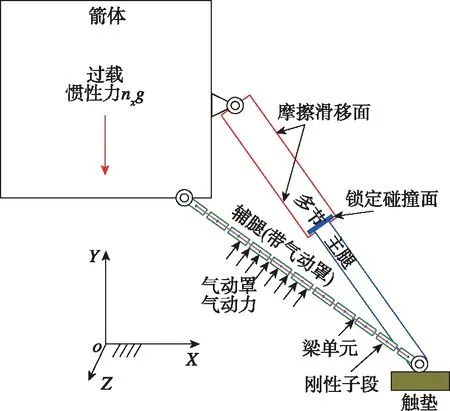
图3 单组着陆腿展开的多体模型
记每个刚体质心在全局系oXYZ下的位置向量为ri,其本体系相对全局系的Euler四元数为λi,则该刚体的广义坐标向量qi可表示为
(1)

(2)
根据第一类拉氏方程,可伸缩着陆腿展开的多体动力学方程可写为
(3)
式中,T为着陆腿系统总动能,q为系统广义坐标向量,Q为广义力(含过载惯性力、气动罩气动力、腿节滑移摩擦力、腿节锁定碰撞力及有限段梁力等),C为系统约束方程(含平动滑移副、铰链转动副,约束方程总数为nc),Λ为对应的拉氏乘子向量。具体地
恩泽集团精益医疗战略的落地管理与实践,是在医院18年持续质量改进工作基础上一点一点丰富和实现的。其中最大成功因素,莫过于“精益”对医疗管理行业的通用价值和管理者陈海啸对精益医疗管理战略整体理解和融合,以及数十年如一日的持续推进和实施。当然,其中亦包含着开展较早、获得外部支持等其他作用力。尤其是随着中国医疗行业整体由规模速度型向质量效益型转变,精益医疗管理必将释放更大效能。
(4)
每个刚体的动能可写为
(5)
式中,刚体i的质量矩阵Mi可写为
(6)
式中,mi为刚体质量,I3为3×3的单位矩阵,Ji为刚体在其本体坐标系下的惯量矩阵,系数矩阵Gi表达式为
(7)
着陆腿机构的多体动力学方程(3)最终可写为
(8)
式中,j=1,2,…,nc为系统约束方程编号。
支腿气动罩在展开过程中所受气动阻力Fd垂直于气动罩表面,气动阻力Fd的计算公式如下
(9)
式中,Cd为气动阻力系数,S为气动罩迎风面积(投影面积),ρ为大气密度,Vf为垂直于气动罩方向的来流线速度。若箭体无下落速度,Vf为旋转展开引起的线速度;若箭体有下落速度,Vf为旋转展开引起的线速度与下落速度在垂直气动罩方向上的分量之和。
支腿气动罩所受气动阻力系数的CFD计算结果见表1。由于气动罩不同位置处线速度不一致,可将气动罩分成若干个区域分别计算气动阻力,如图4所示。
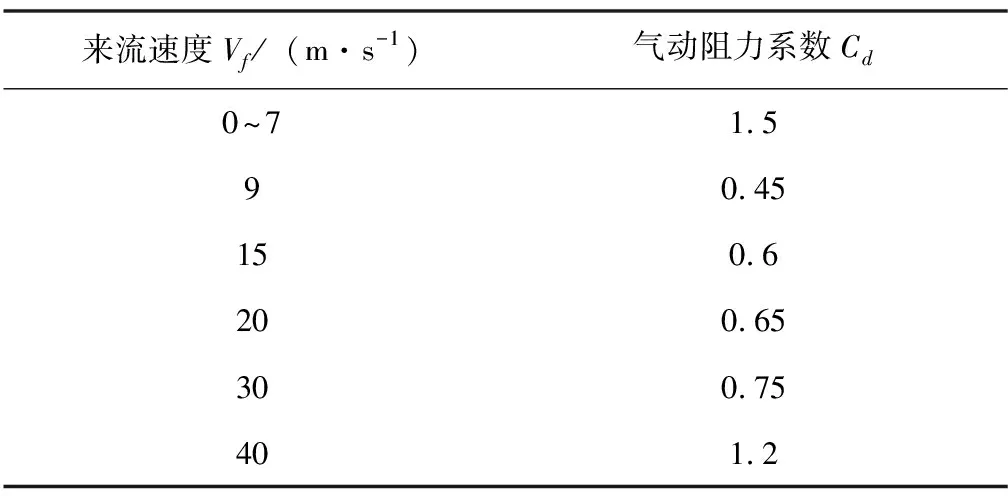
表1 支腿气动罩气动力系数
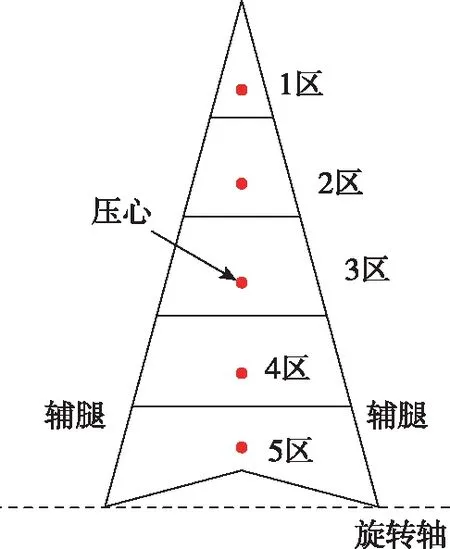
图4 着陆腿气动罩气动力的分区
着陆腿各体所受的过载惯性力始终沿oY轴负方向,大小等于重力与过载系数nx之积。有限段梁力包含6个分量,由弹性力和阻尼力两部分组成。其中,弹性力项根据铁摩辛柯短粗梁模型确定,阻尼力根据瑞利阻尼给出。腿节滑移摩擦力为动摩擦系数与腿节间正压力之积。各腿节展开到位时刻因锁定而发生碰撞,碰撞力可按赫兹接触模型给定[17]。
2 着陆腿展开的仿真分析
式(8)所示多体系统的动力学控制方程为“微分--代数”方程组(Differential Algebraic Equations,DAE),采用向后差分格式(Backward Differential Formulation,BDF)可将其离散为非线性代数方程组,再利用牛顿--拉普森迭代法(Newton-Raphson Iteration Method)可实现隐式积分求解。

2.1 结构柔性对展开的影响
针对着陆腿展开标准工况,分别建立含柔性辅腿和刚性辅腿的着陆腿多体系统模型,并开展动力学仿真对比,可研究结构柔性对展开的影响。
着陆腿展开的典型动态过程如图5所示。在过载引起的垂向惯性力作用下,主腿各腿节被逐渐拉出,着陆腿整体呈加速展开趋势。
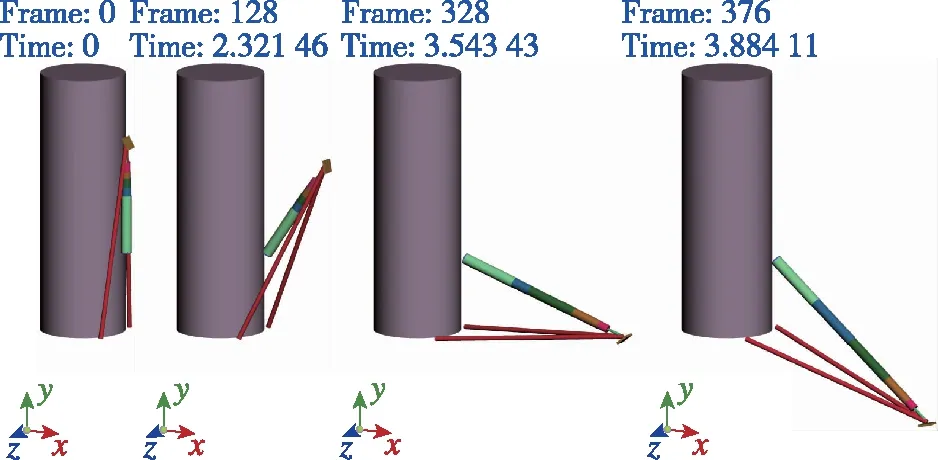
图5 可伸缩着陆腿展开动态过程
结构柔性对主腿展开角度和角速度的影响见图6~9。柔性模型展开过程中,辅腿中部的变形挠度见图10。结构柔性对展开特性的影响详见表2。分析可知,结构柔性对展开到位角速度的影响可以忽略,对展开时长的影响较小(约为1.36%);展开过程中辅腿中部挠度最大仅为5.54 mm,挠度峰值时刻发生在中间两次腿节锁定之时,分别为2.98 s和3.547 s,详见图10。
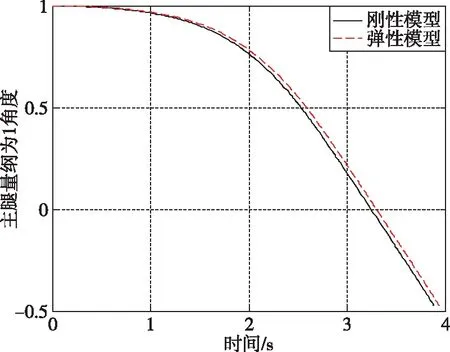
图6 结构柔性对主腿展开角度的影响(全局)
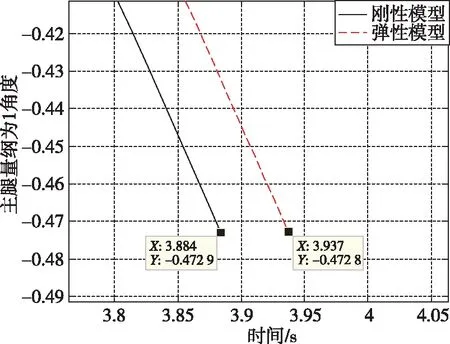
图7 结构柔性对主腿展开角度的影响(局部)
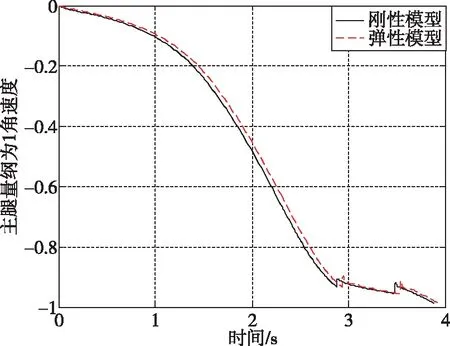
图8 结构柔性对主腿展开角速度的影响(全局)
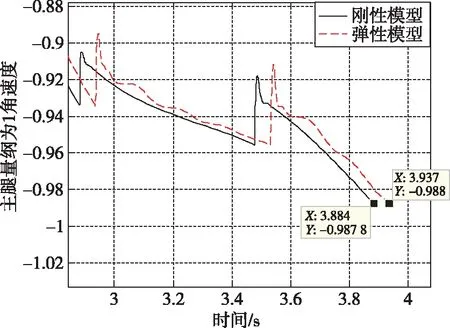
图9 结构柔性对主腿展开角速度的影响(局部)
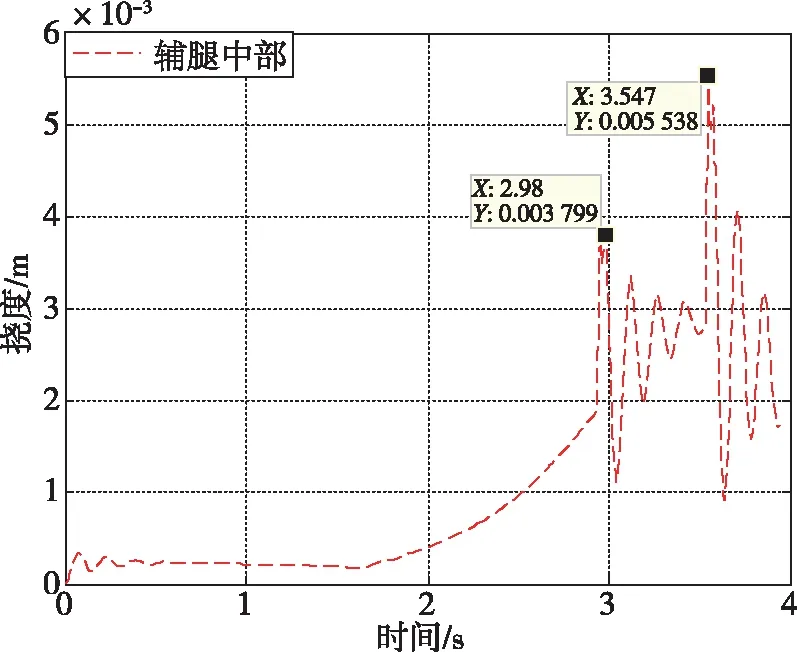
图10 展开过程中辅腿中部的横向变形量
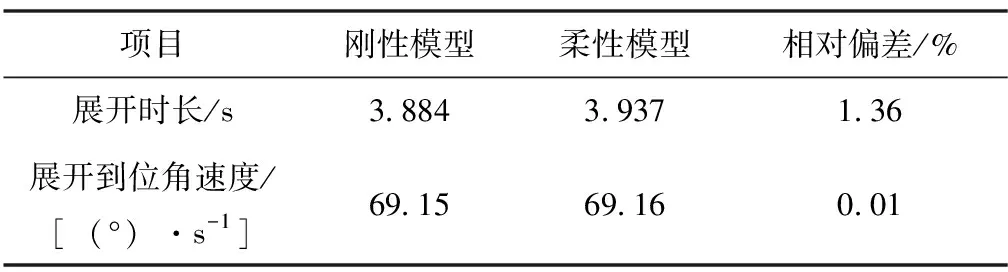
表2 结构柔性对展开过程的影响
2.2 腿节滑移摩擦力对展开的影响
从着陆腿展开特征来看,垂向惯性力产生的势能在展开过程中逐渐转化为着陆腿的动能,使得展开角速度逐步增大,直至展开到位时刻。通过调节主腿腿节间滑移摩擦力可对展开时长和展开到位角速度进行综合设计,使得在展开到位冲击可承受的情况下尽可能缩短展开时间。
针对着陆腿展开标准工况,对腿节间摩擦力额定设计值Ffr,偏差上限值1.25Ffr,以及偏差下限值0.8Ffr3种状态开展展开仿真,得到主腿展开角度及角速度的对比见图11和图12。
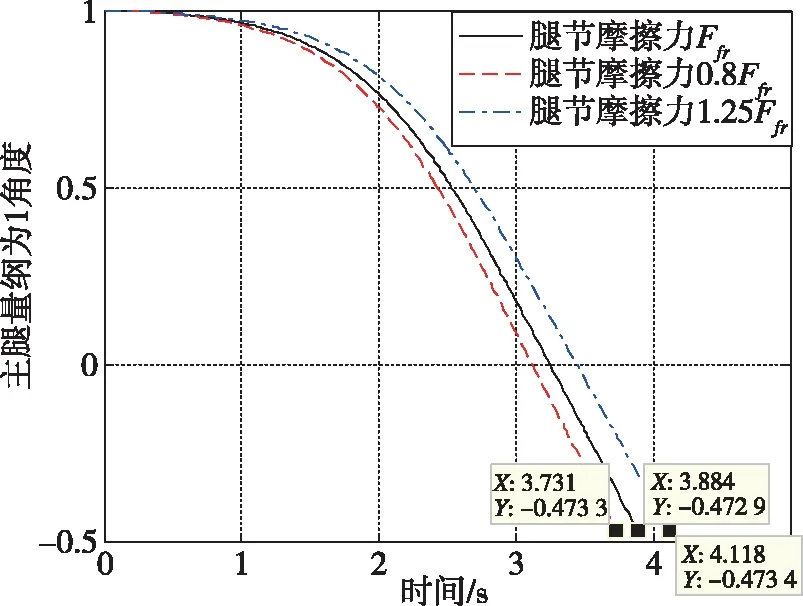
图11 腿节摩擦力对主腿展开角度的影响
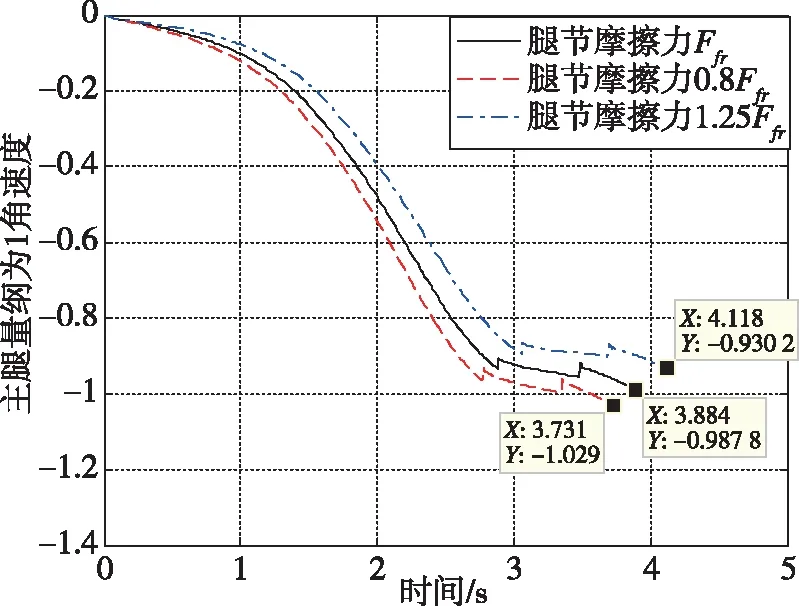
图12 腿节摩擦力对主腿展开角速度的影响
对比可知,腿节间摩擦力大小对展开时长和展开到位角速度的影响规律相反。摩擦力越大,展开时长越大,而展开到位角速度越小,反之亦然。相比于腿节间摩擦力额定设计值,-20%~+25%范围的摩擦力偏差对展开时长的影响为-3.94%~+6.02%,而其对展开到位角速度的影响为-5.83%~+4.12%,详见表3。仿真结果表明,合理调节腿节间摩擦力是着陆腿展开工况设计的一个有效手段。
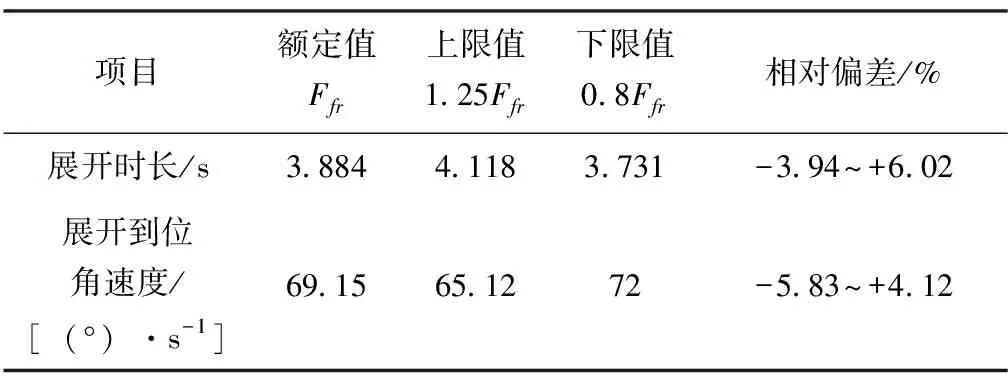
表3 腿节摩擦力对展开过程的影响
2.3 气动罩气动力对展开的影响
气动罩气动力对展开时长和展开到位角速度的影响规律相反,详见图13~16。气动阻力越大,展开时长越大,而展开到位角速度越小,反之亦然。相比着陆腿展开标准工况(垂向静止),箭体下降速度为30 m/s时,展开时长将增大4.84%,展开到位角速度将减小14.96%。
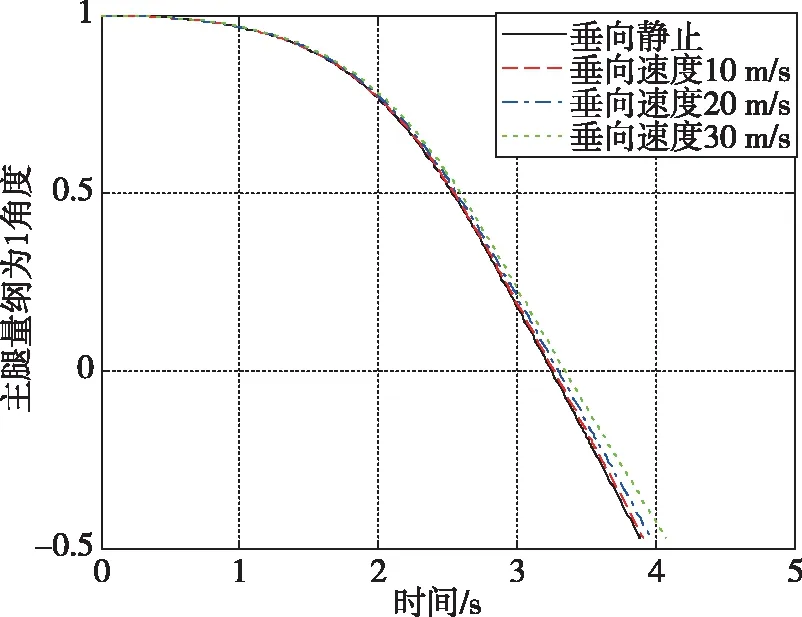
图13 气动罩气动力对主腿展开角度的影响(全局)

图14 气动罩气动力对主腿展开角度的影响(局部)
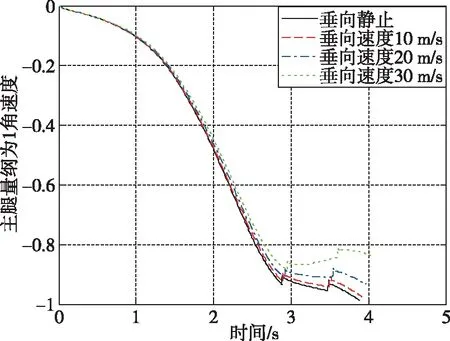
图15 气动罩气动力对主腿角速度的影响(全局)

图16 气动罩气动力对主腿角速度的影响(局部)
2.4 过载对展开的影响
最后,可通过多体仿真研究过载对展开过程的影响。在返回弹道的不同时刻发出着陆腿展开指令,显然对展开可靠性而言具有较大影响。失重状态下,着陆腿将无法展开。针对着陆腿展开标准工况,另将过载系数nx分别设置为1.1,0.8和0.6这3个值,通过展开仿真结果对比,可分析过载对展开角度和角速度的影响,详见图17和图18。
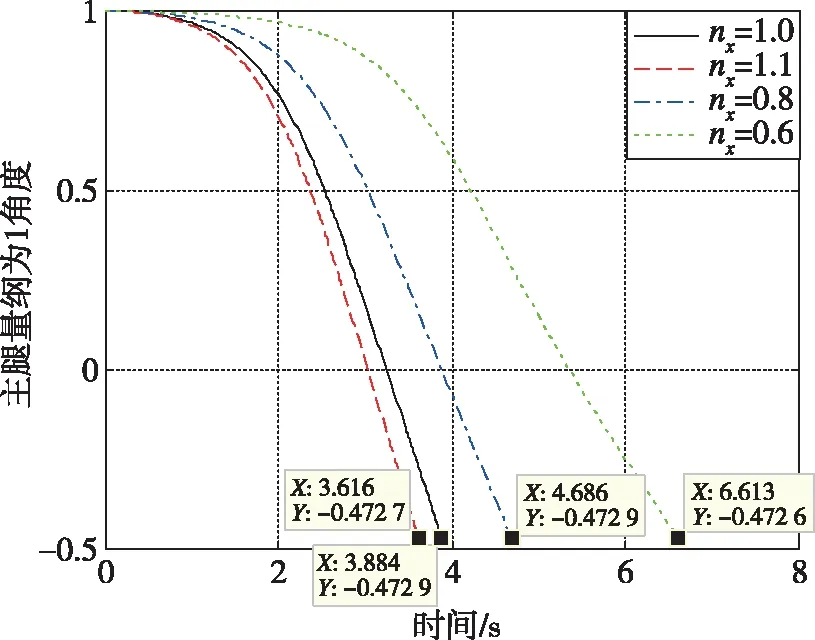
图17 轴向过载nx对主腿展开角度的影响
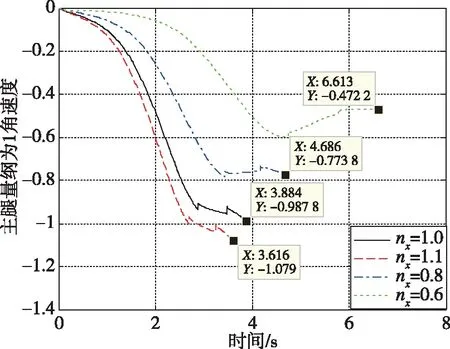
图18 轴向过载nx对主腿展开角速度的影响
不同轴向过载下的仿真结果表明:轴向过载系数nx越小,则展开时长越大,展开到位最大角速度越小。相比展开标准工况,过载系数nx为0.6时,展开时长增大70.26%,展开到位最大角速度则减小52.20%。仿真结果表明,通过选取返回弹道适当时刻发出解锁指令,可大幅降低展开到位角速度,从而有效控制展开冲击载荷,同时可确保着陆腿展开时长在可接受范围之内。
3 结论
本文针对倒三脚架式可伸缩着陆腿火箭垂直回收方案,采用多体动力学方法对类似Falcon火箭的可伸缩着陆腿展开过程开展了动力学仿真分析,通过研究比对支腿结构柔性、腿节滑移摩擦力、气动罩气动力及过载对展开时长和展开到位角速度的影响,得到如下主要结论:
1)着陆腿展开过程中,作为系统中刚度最小构件的副腿(长度约8 m)的最大挠度仅为5.54 mm,结构柔性对展开时长和展开到位角速度的影响分别为1.36%和0.01%,表明结构柔性对展开过程的影响可以忽略。
2)腿节间滑移摩擦力阻碍展开的效果比较明显。对比滑移摩擦力额定值Ffr,0.8Ffr~1.25Ffr的摩擦力偏差范围对展开时长的影响为-3.94%~+6.02%,对展开到位角速度的影响为-5.83%~+4.12%,表明通过调节腿节滑移摩擦力可实现对展开工况的优化设计。
3)气动罩气动力也具有阻碍展开的作用,其影响大小取决于展开时刻箭体的垂向下降速度。支腿展开时长通常小于10 s,在展开过程中可以认为大气密度保持不变。本文的多体仿真算例表明,相比于箭体垂向静止的情况,当支腿在箭体下降速度为30 m/s时展开,展开时长将增大4.84%,展开到位角速度将减小14.96%。
4)作为被动式着陆腿展开的能量源,箭体轴向过载对展开过程的影响最大。相比于过载系数nx为1.0的情况,nx为0.6时,展开时长将增大70.26%(达6.613 s),而展开到位角速度可降低52.20%。仿真表明,选取着陆腿展开的适当过载,可大幅降低展开到位角速度及展开冲击载荷,同时可将着陆腿展开时长控制在可接受范围之内。