高铁轨道工程施工质量 BIM和点云建模技术控制方法
2022-02-03陈路
陈 路
(中铁十八局集团第一工程有限公司 河北省涿州市 072750)
0 引言
我国人口众多,且内陆深广,高速铁路因具有运载能力强、节能环保和安全系数高等优势,已成为综合交通运输体系的重要支撑[1].高速铁路可以实现客运分离,不仅能给人们的日常出行带来极大的便利,还能有效缓解公路运输压力,同时能够有效促进沿线区域经济发展,因此我国越来越重视高速铁路建设[2-3].轨道工程是高速铁路建设的关键环节,轨道平顺性和稳定性直接影响着高速铁路的行车安全、乘客的舒适度以及高速铁路维护难度和工作量,因此在高速铁路轨道工程施工过程中,对整个项目质量进行严格控制极其必要[4].
张海宝,姚志安等分别利用北斗RTK定位技术与锚下有效预应力检测技术,控制高速铁路轨道工程施工项目质量[5-6],均能实现项目质量的高精度及全过程控制,但对于结构和环境较为复杂的大型项目质量控制效果不甚理想.为解决当前方案存在的不足,本文结合郑济高铁的实际情况,利用建筑信息模型(Building Information Modeling,BIM)技术和点云建模技术,研究高速铁路轨道工程施工项目质量控制方案,以期为高速铁路轨道施工提供参考.
1 工程施工项目质量控制方案
1.1 高速铁路轨道结构及工程施工项目工艺流程
1.1.1 高速铁路轨道结构
高速铁路轨道选用单元分块式结构,总体高度为756 mm,主要包含WJ-8B弹性扣件、钢轨和轨道板等部分.其中钢轨为无螺孔新轨,长度为100 m,轨道板宽度和厚度分别为2 500 mm、210 mm,各轨道板之间相互独立,这样有助于明确高速铁路轨道结构受力情况[7].用图1描述高速铁路轨道结构横断面情况.
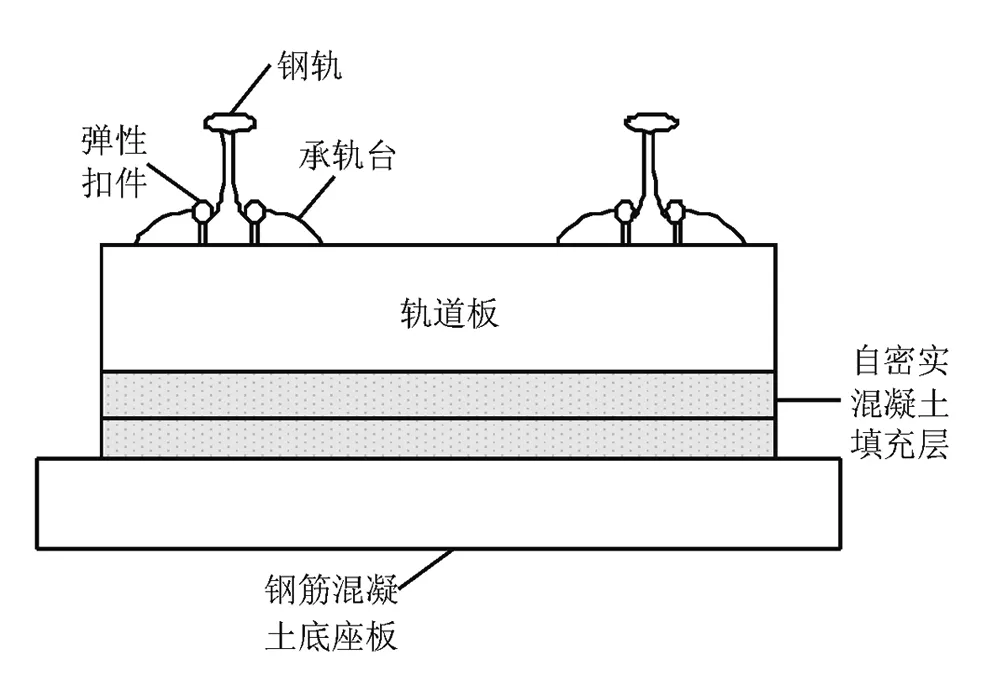
图1 高速铁路轨道结构横断面示意图
1.1.2 高速铁路轨道工程施工项目工艺流程
高速铁路轨道工程施工项目工艺流程主要包含以下环节:
1)轨道板制作:轨道板的横向选用预应力混凝土板,纵向利用张拉锁件进行连接,内部钢筋需要采取绝缘处理,当横向板完成收缩除变操作后,为满足轨道板的制作精度要求,应通过数控磨床机械实现承轨槽的精磨.
2)钢筋混凝土底座板施工:为了避免钢筋混凝土底座板的技术参数产生偏差,需复核设计图中的坐标点并铺设滑动层,即中间铺设一层塑料薄膜,上下两层均为土工布,并利用绝缘卡捆绑底座板钢筋[8],保证各钢筋交叉点绝缘电阻值大于等于10,处理完成后通过吊车对底座板混凝土进行摊铺.
3)轨道板铺设和精调定位:利用龙门吊将轨道板粗放于钢筋混凝土底座板上,为了使轨道板的空间位置能够达到既定标准,运用轨道板精调系统对粗放的轨道板实施精调定位.
4)自密实混凝土灌注:采用重力式灌浆法向轨道板与钢筋混凝土底座板之间的填充层灌注自密实混凝土,在其抗压强度达到1 MPa的条件下,便可撤除轨道板压紧设备.
5)无缝线路钢轨焊接和铺设:使用闪光焊轨机将100 m的无螺孔新轨焊接为指定长度的长钢轨,将其采用牵引机完成拖拉铺设后,运用移动焊机进行锁定焊接,以达到无缝线路钢轨焊接和铺设的目的.
1.2 高速铁路轨道点云模型构建
1.2.1 基于视觉传感器的高速铁路轨道点云数据获取
采用视觉传感器获取高速铁路轨道的色光信息和深度图像,通过转换深度图像中二位像素坐标,使其变为三维点云空间坐标[9],即可得到高速铁路轨道点云数据.
利用公式(1)矩阵模型表示各空间点的位置和像素坐标:
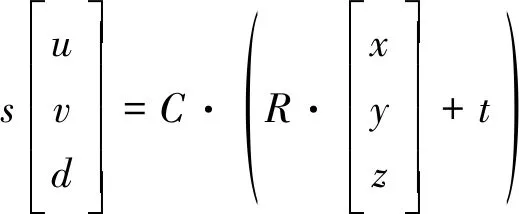
(1)
式中,参数矩阵用C表示,其定义形式如公式(2);高速铁路轨道深度图像中的像素坐标用[u,v,d]表示;深度数据用d表示;空间点用[x,y,z]表示,其与像素坐标之间的关联如公式(3)所示:
(2)
(3)
式中,x轴上的焦距用fx表示;y轴上的焦距用fy表示;光圈中心用cx和cy表示;深度图像的缩放因子用s表示.
依据公式(3)可获得高速铁路轨道三维点云空间坐标的计算过程[10-11],具体用公式(4)描述:
(4)
1.2.2 高速铁路轨道点云数据拼接
对1.2.1中采集的高速铁路轨道点云数据,利用最小二乘法进行拼接,获得完整的点云数据.
假设[xh,yh,zh,h]表示高速铁路轨道三维点云空间坐标的齐次坐标,其中非0常数用h表示,为简化计算h值通常取1,xh、yh和zh分别表示为xh=hx,yh=hy,zh=hz.
假设高速铁路轨道三维点云空间坐标[x,y,z]的坐标变换矩阵用T3D表示,其由四个子矩阵构成,分别用于产生平移、投影、比例和旋转变换.假设某点P在任意两块点云数据中的坐标分别用P1=(x1,y1,z1,1)、P2=(x2,y2,z2,1)表示,则可用公式(5)描述两坐标之间的关系:
P1T3D=P2
(5)
通常,已知两块点云数据中相匹配的3个标志点便能实现点云数据拼接.但为了解决因测量误差导致点云数据拼接精度降低的问题,需要选取更多标志点,利用最小二乘法对其进行处理,以得到最优坐标变换矩阵[12-13].
将公式(5)描述的坐标关系式转换为公式(6)所示形式,据其得到最小二乘目标函数,具体形式用公式(7)描述:
PT3D+δ=Q
(6)
(7)
式中:误差向量用δ表示;两块高速铁路轨道点云数据中,标志点对的坐标矩阵分别用P、Q表示;针对次序为i的标志点,其满足PiT3D=Qi+δi,i的取值介于[1,n]范围内,n表示标志点数量,则式(8)成立:
AT3D=B
(8)
式中:维数为n×m的矩阵用A表示;维数为1×m的矩阵用B表示.将式(8)转换成公式(9)所示的线性方程组:
AXi=bi,i=1,…,4
(9)


(10)
用公式(11)描述公式(9)的最小二乘解的通解求取过程如式(11):
Xi=A+bi+(I-A+A)
(11)
式中,矩阵A的广义逆用A+描述,据该式可得到坐标变换矩阵T3D=A+B.
为利用最小二乘法拼接高速铁路轨道点云数据的具体过程如下:
1)依据标志点空间拓扑关系,从两块高速铁路轨道点云数据中寻找相应标志点对,当其数量超过3时,利用矩阵A、B分别保存各标志点对,且当其数量小于等于3时,表明无法拼接点云数据.
2)通过最终的坐标变换矩阵T3D=A+B计算出T3D,其中矩阵A的广义逆A+的计算过程为A+=AT(AAT)-1,矩阵A的转置用AT表示.
3)将两块点云数据中的一块利用T3D进行坐标变换处理,将变换结果添加至另一块点云数据中,在此基础上剔除重叠点云,完成高速铁路轨道点云数据拼接.
依据获得的高速铁路轨道点云数据拼接结果,利用曲面重构方法[14-15],实现高速铁路轨道点云模型构建.
1.3 高速铁路轨道工程施工项目质量控制
引入BIM技术,结合1.2小节创建的高速铁路轨道点云模型,控制高速铁路轨道工程施工项目质量,具体流程用图2描述.
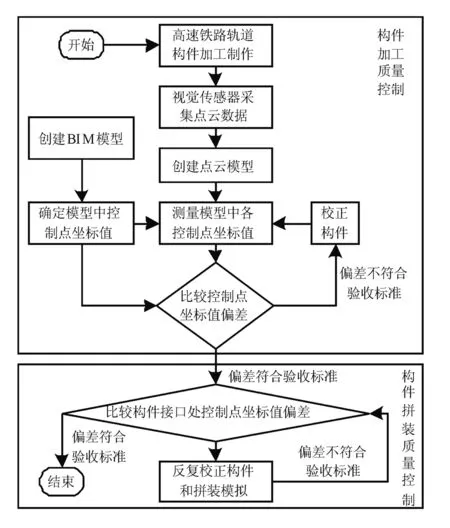
图2 高速铁路轨道工程施工项目质量控制流程图
1)根据高速铁路轨道设计图,利用Tekla和Revit等BIM软件进行原比例建模,从而为后续的工程施工项目质量控制提供模型支持.
2)选取并布设合适的测站和检测点,用视觉传感器采集高速铁路轨道点云数据,利用最小二乘法对采集的点云数据进行拼接,运用三角形格网封装拼接后的点云数据,以达到曲面重构的目的,构建高速铁路轨道点云模型.
3)将以上两个过程创建的BIM模型和点云模型导入Geomagic Control软件,进行高速铁路轨道构件加工质量控制.确定BIM模型中构件各检测点坐标值,比较其与点云模型中构件相应点的坐标值,生成构件偏差分析报告,若构件偏差符合工程施工项目质量验收标准,则进入现场虚拟拼装阶段;否则需要校正构件,并重新检测校正后构件的质量,直到其达到验收标准.
4)现场虚拟拼装阶段主要负责控制高速铁路轨道构件的拼装质量.针对两构件接口处,比较BIM模型和点云模型中对应检测点坐标值,生成构件拼装偏差分析报告,依据其中需调整的信息进行反复校正和拼装模拟,直到构件拼装质量达到工程施工项目质量验收标准,实现高速铁路轨道工程施工项目质量控制.
2 结果分析
以郑济高速铁路轨道工程施工项目作为实验对象,在布设测站利用视觉传感器采集轨道点云数据,创建相应的点云模型,同时运用BIM技术创建原比例模型,依据两个模型并通过本文方案对轨道构件加工及拼接质量进行控制.
从郑济高速铁路轨道随机选取9个测量点,分别用A1~A9表示,各测量点的点云空间三维坐标值和实际坐标值对比情况如表1所示.
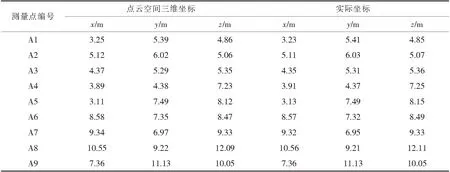
表1 高速铁路轨道点云数据采集测试
从表1可以看出,采用本文方案采集的各测量点的点云空间三维坐标值与实际坐标值十分接近,最大偏差仅为0.03 m,并且存在数值完全一致的情况,例如A9测量点,表明本文方案具有较优良的高速铁路轨道点云数据采集质量.用本文方案对两块高速铁路轨道点云数据进行拼接测试,所得结果用图3描述.
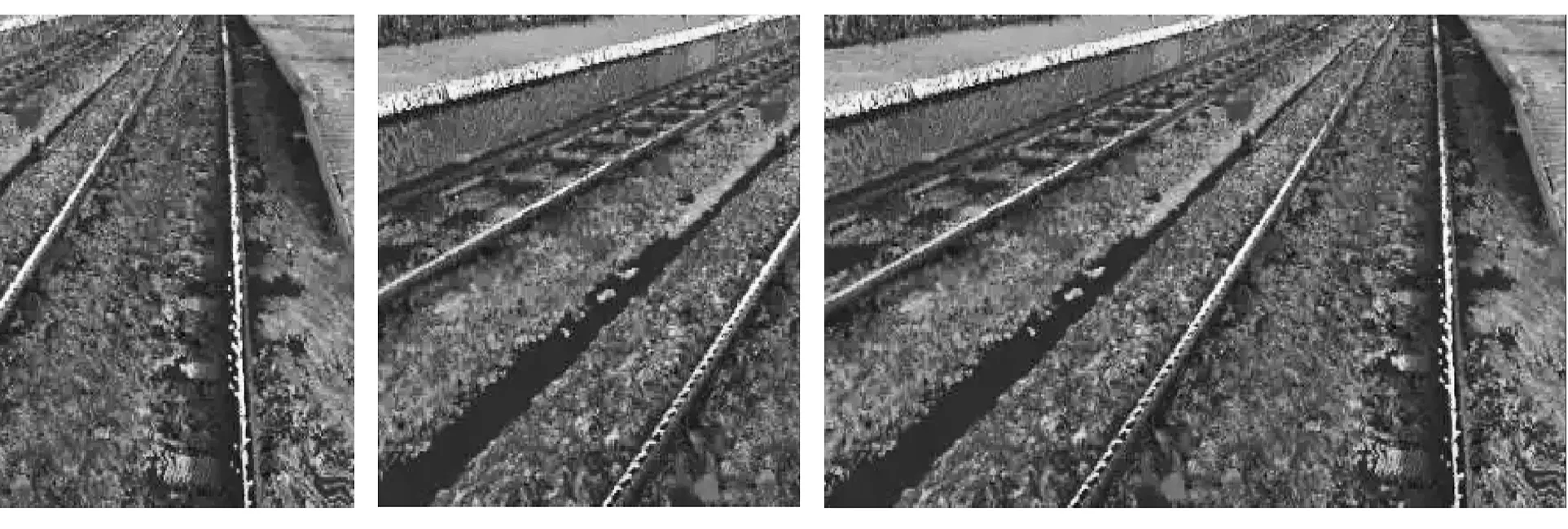
(a) 块1点云数据 (b) 块2点云数据 (c) 点云数据拼接结果
分析图3可以发现,本文方案采集的点云数据可以清晰呈现高速铁路轨道结构情况,并可以精确拼接两块点云数据,所得拼接结果完整,且未出现重叠和错位现象.由此表明,本文方案的高速铁路轨道点云数据拼接效果能较好针对高速铁路轨道BIM模型,随机选取轨道板上的6个检测点,分别用B1~B6表示,将其坐标值与点云模型中轨道板上相应检测点的坐标值进行比较,同时随机选取承轨台和弹性扣件接口处的6个检测点,分别用C1~C6表示,采用同上方法进行比较,所得结果用表2 描述.
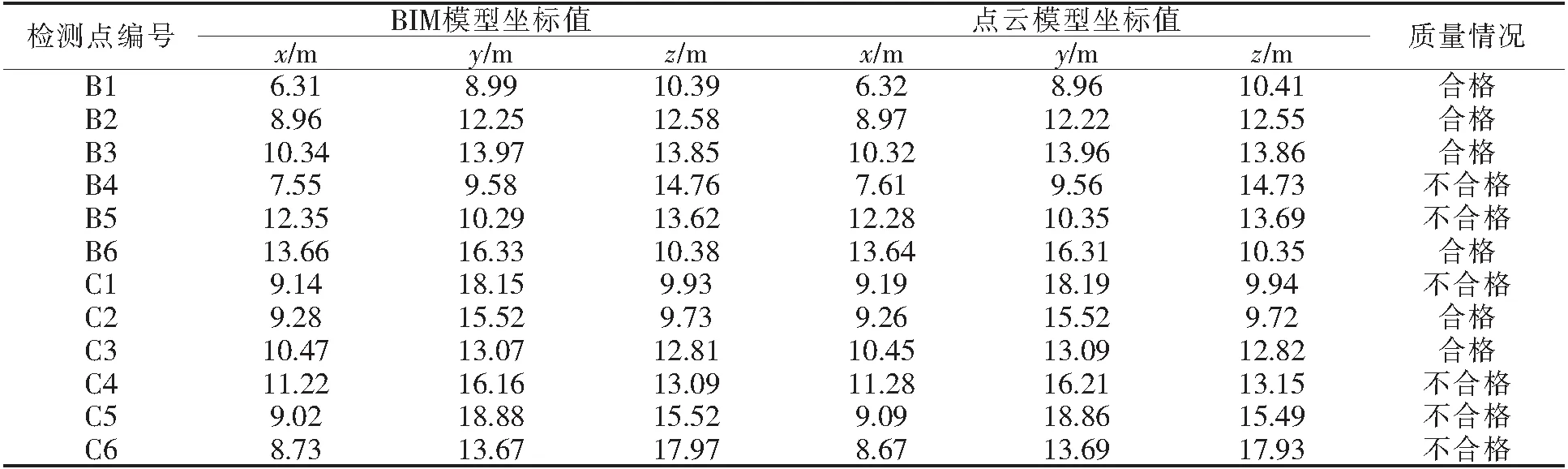
表2 高速铁路轨道构件加工及拼接质量检测结果
分析表2可以发现,两个模型中检测点坐标值只要有一个维度的数值偏差不符合验收标准,均会被认定为不合格,表明本文方案对高速铁路轨道工程施工项目质量检测较严格.
根据《铁路轨道制造规范》规定的工程施工项目质量验收标准,最大偏差为+0.04/-0.03.对于表2内质量不合格的检测点,利用本文方案进行质量控制,控制后结果用表3描述.

表3 高速铁路轨道工程施工项目质量控制结果
分析表3可以看出,针对不合格的检测点,经过本文方案的质量控制后,各检测点坐标值偏差均被控制在质量验收标准范围内,表明本文方案具有较理想的高速铁路轨道工程施工项目质量控制效果.
随机选取长度为900 m的3段高速铁路轨道进行测试,采用TQI指数评价本文方案应用后各段高速铁路轨道的平顺性,该指标值与轨道平顺性成反比,具体结果用图4描述.
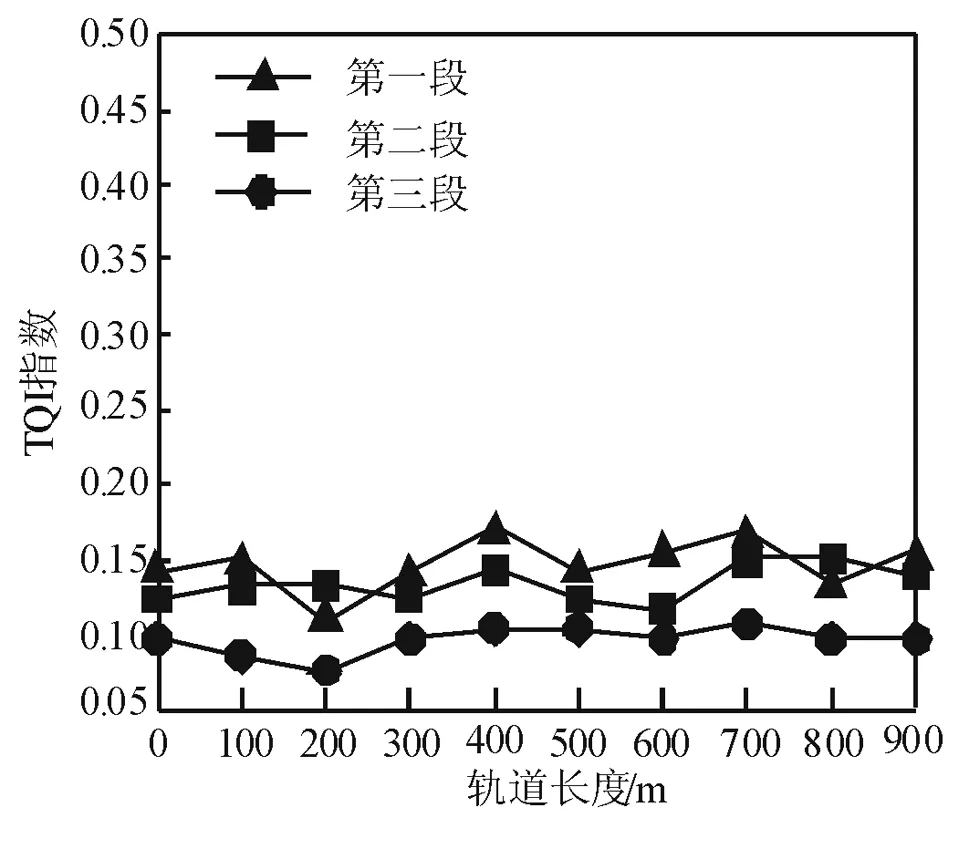
图4 高速铁路轨道平顺性测试
从图4可得,本文方案使用后,各段高速铁路轨道的TQI指数均在0.20以下变化,整体平顺性水平较高,其中第三段高速铁路轨道的TQI指数始终保持最低,平顺性最优,因此可进一步验证本文方法的高速铁路轨道工程施工项目质量控制效果好,能有效保证各段高速铁路轨道施工的顺利进行.
3 结论
严格控制高速铁路轨道施工质量,是保证高速铁路安全平稳运行的关键,因此本文结合BIM技术和点云建模技术,研究高速铁路轨道工程施工项目质量控制方案.经实验分析,该方案具有较显著的高速铁路轨道点云数据采集和拼接效果,并且能严格检测高速铁路轨道工程施工项目质量,并能针对质量不达标的部分经过该方案处理后均能使其符合质量验收标准,能有效保证各段高速铁路轨道施工的顺利进行.
