复杂背景下远距离合作信标识别与定位*
2022-02-03岳成海佟新鑫李英杰
岳成海,佟新鑫,李英杰,刘 松,周 勇
(1. 中国科学院光电信息处理重点实验室·沈阳·110016;2.中国科学院沈阳自动化研究所· 沈阳·110016;3.中国科学院机器人与智能制造创新研究院· 沈阳·110169)
0 引 言
合作信标识别与定位是飞行器测控应用领域的关键技术,如火箭弹遥测制导、无人机远程跟踪等。传统合作信标一般为常亮模式,如燃烧发光体、热辐射源、氙气灯,不具备信息调制能力。文献[1]对美制陶式反坦克导弹的技术路线进行了详细的描述,弹上信标从最初的热源信标到氙灯/热辐射复合信标的迭代,抗干扰能力不断提高。黄静等[2]对点源目标的红外成像作用距离进行了系统论述。由于采用的信标不具备编码调制功能,信标特性简单,处理方法单一,无法适应复杂环境或存在主动干扰源的应用场景。同时,受燃料或电能限制,远距离工作条件下难以实现较高光能输出,光能衰减后,也难以实现信标的准确识别。
本文针对传统信标光源的不足,将半导体激光光源作为合作信标光源,充分利用半导体激光光源输出功率高、开关响应速度快等特性,对驱动调制电路进行研究[3-5]。在调制方式上,引入多种调制方法,实现特定信息到光信号的编码转换,以适应复杂的应用环境;在信号接收上,采用面阵CMOS图像传感器作为信号接收组件,并在成像前端配置光谱选通组件;信息解调时,设计与信标调制端耦合的解调算法,实现合作信标在复杂应用场景下的准确识别与定位,提高环境适应性与抗干扰能力。
1 驱动调制电路及调制算法设计
1.1 驱动调制电路设计
根据点源目标的作用距离分析[2]可知,为保证远距离(≥3km)复杂背景下合作信标的信号强度,设计的信标光源输出光功率应不小于30W,选用半导体激光光源(Laser Diode,LD)作为信标光源,可满足输出功率需求与调制需求。设计具有光源输出功率稳定控制与调制功能的电路系统[3-5]。
对于线性度好的半导体激光器,输出功率为注入电流的线性关系,如式(1),其中η为功率转换系数(与激光器本身参数有关:如谐振腔尺寸等,在一定温度下,近似为常数,可查阅半导体激光器制造商的数据手册得到,一般为0.5~0.8),I为输入电流,Ith为阈值电流。
P=η(I-Ith)
(1)
图1所示为半导体激光器的输出光功率随加载在半导体激光器上的电流的变化关系,当加载电流小于阈值电流时,激光器工作于自发发射,输出荧光,输出光功率很小;当加载电流大于阈值电流时,激光器工作于受激发射,输出激光,输出光功率随加载电流增加,近似呈线性关系。由图1可知,半导体激光器的阈值电流随温度升高而成倍增大;发光效率随温度升高而降低,主要由内部热损耗与量子效率降低导致。

图1 半导体激光器L/I曲线Fig.1 L/I curve of semiconductor laser
为保证激光器光功率稳定,驱动电路一般包含恒流驱动与恒功率驱动两种方式。恒流驱动电路一般包含调制输出电路、电压/电流转换电路与反馈电路,反馈电路实时采集流过LD的电流值,调制输出电路与基准电压比对,调整输出给电压/电流转换电路的电压值,达到动态稳定,实质为负反馈控制方式。恒功率驱动电路由电流源与光电探测器组成,以光电探测器采集输出光功率作为反馈,控制输入的驱动电流大小,结构较复杂。本文采用恒流驱动方式,并增加温度监测与控制电路来设计驱动调制电路。
在评估分立元件与集成芯片的优缺点后,选用MAX20078芯片作为半导体激光器的恒流控制器芯片设计驱动电路,系统组成如图2所示。其中CP为主处理器,选用CPLD,完成所有功能模块的配置与控制;RF为无线通信模块,由NRF24L01芯片实现,通信距离可达3km,实现信标的远程控制功能,通过SPI接口与CP互联;AD模块由TI高精度12位AD芯片ADC128S实现,采样率达1MSPS,用于采样驱动芯片的IOUTV端口电压,从而测量驱动控制器的输出电流,通过SPI接口与CP互联;DA模块由TI高精度12位DA芯片DAC128S实现,用于控制MAX20078的REFI端口,实现驱动模式配置,通过SPI接口与CP互联;VC模块为驱动输出端电压、电流、功耗监测模块,由TI精密电源管理芯片INA260实现,此芯片为16位电流/电压/功率监控器,通过I2C接口与CP互联;UC为MAX20078示意框图,DIM为输出状态控制端口,FLT为工作状态指示端口,两个端口直接连接CP的GPIO口;TE为温度监测模块,实现半导体激光器温度监测,通过SPI接口与CP互联。
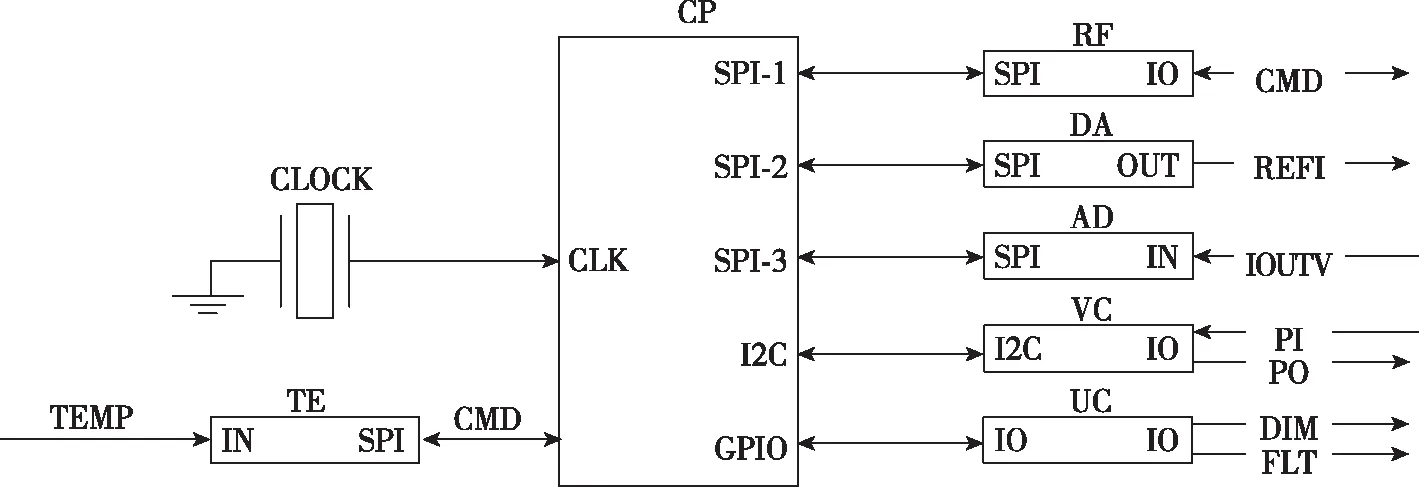
图2 调制与驱动电路框图Fig.2 Block diagram of modulation and drive circuit
1.2 调制方法设计
复杂背景或特殊应用场景下,干扰源各式各样,不仅包含自然光干扰源,还存在主动干扰源,例如主动对抗干扰,这对合作信标的有效鉴别提出了很大的挑战。信标调制的目的是实现信标的抗干扰性能,包含功率调制、开关调制、编码调制。
为配合图像传感器成像解调方式,首先由解调端通过无线通信接口发送控制指令,配置调制信号频率、信号极性关系、调制方式。其中调制信号频率等价于开关频率;极性关系指开/关与1/0的映射关系;调制方式包含功率调制、开关调制、直接频率调制、频率编码调制、信息编码调制,其中信息编码方式包含奇偶校验码、汉明校验码、循环冗余校验码等。
为兼容信标的运动应用场景,设计的成像解调端图像处理能力为200Hz,信标输出的调制频率范围为1~200Hz。
(1)功率调制
为实现恒定出光功率,CP处理器实时采集半导体激光器的温度与驱动芯片的输出电流,首先根据L/I曲线得到阈值电流,结合式(1),调整驱动芯片UC的REFI端口的电压值或DIM端口的PWM信号占空比,实现所需电流输出,等价于一个反馈环路,达到动态平衡,同时应保证输出的电压电流不超过半导体激光器的工作阈值。
(2)开关调制
光源的开关控制通过控制驱动控制芯片的DIM接口实现,首先将REFI端口配置为1.2V以上,此时驱动控制芯片的输出由DIM端口控制,当DIM为低电平时,输出关断;当DIM为高时,输出开启。开关调制需要与解调端进行同步化(同步设计参考下文),只需要在解调窗口内开启,其他时间窗口关断,这样的工作方式有利于系统功耗控制,可有效降低半导体激光器的温升,提高激光器的稳定性。如图3所示,开关输出模式下,L/I曲线更稳定。
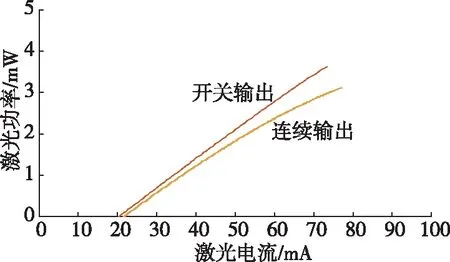
图3 不同输出模式的L/I曲线Fig.3 L/I curve for different output modes
(3)直接频率调制
由成像解调端通过无线通信接口发送控制指令,配置调制频率,CP控制器根据频率调整驱动控制器DIM端口的开关频率,实现输出光信号的频率变化。
(4)频率编码调制
首先由解调端通过无线通信接口配置所需调制频率,频率编码的定义示例如图4所示,包含常亮段、常暗段和频率编码段。设信标输出的开关频率为200Hz,常亮为1,常暗为0,解调指令配置频率为200Hz,则对应的频率编码段[0∶7]为10101010,完整编码数据为10-1010-10-1010;解调指令配置频率为100Hz,则对应的频率编码段[0∶7]为11001100,完整编码数据为10-1100-10-1100;解调指令配置频率为50Hz,则对应的频率编码段[0∶7]为11110000,完整编码数据为10-1111-10-0000。

图4 频率编码格式Fig.4 Frequency encoding format
(5)信息编码调制
首先由解调端通过无线通信接口配置信息编码方式与信息,这里对奇偶校验码和汉明校验码两种编码方式进行编码分析。
①奇偶校验码
奇偶校验码可以检测出奇数个数的位出错,通过在要校验的编码上加一位校验位组成,解码端发送的信息为3bit的110,则编码信息由4bit构成,信息段为3bit,校验段为1bit,如图5所示。在奇校验模式下,编码后为1101,对应的完整编码数据为10-1101;在奇校验模式下,编码后为1100,对应的完整编码数据为10-1100。

图5 奇偶校验码编码格式Fig.5 Parity check code encoding format
②汉明校验码
汉明码不仅具有纠错功能,还能根据验算过程判断出发生错误的位置。例如解码端发送的信息为4bit的0110,根据汉明校验码的编码规则,需要的校验位数为3,总长度为7,如图6所示,0、1、2、3为信息位,4、5、6为校验位,编码信息段值为0110-011。特别注意,由于信息段较长,实际传输时将其拆分为两段,因此最终的信标编码为10-0110-10-011。

图6 汉明码编码格式Fig.6 Hamming encoding format
汉明码纠错过程:假如汉明码的第7位(对应图6中的0位)出错,解码接到数据为1110011,首先根据汉明码编码方式得到校验字段为100,接收的校验字段为011,每个位置都对不上,因此出错的位数为7,正确的信息为0110。
2 解调及识别定位算法设计
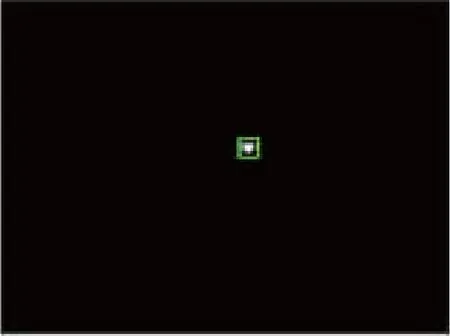
合作信标将信息转化为特定格式的光信号后,以合适的功率向外辐射,信号接收选用成像接收模式[6-11],可同时实现合作信标的定位与识别。成像接收模式下,采用CMOS图像传感器采集合作信标所在区域的图像,当信标光源开启时,成像为具有一定亮度的亮斑;当信标关闭时,成像为背景,如图7所示。

图7 开启与关闭测试Fig.7 Opening and closing test
2.1 成像解调与编码同步
成像与信标开关时序如图8所示,例如信标开启(on)时间为5ms,关断(off)时间为5ms,开启上升时间为t1,关断下降时间为t2,A、B点分别为图像传感器的曝光开始与结束时间点,系统同步的目的是保证信号采集窗口te位于on、off的稳定区间内。t1与t2由驱动电路与半导体激光器的特性决定,一般为几十ns,对几百μs到几ms的曝光时间而言,影响很小,可不做考虑。
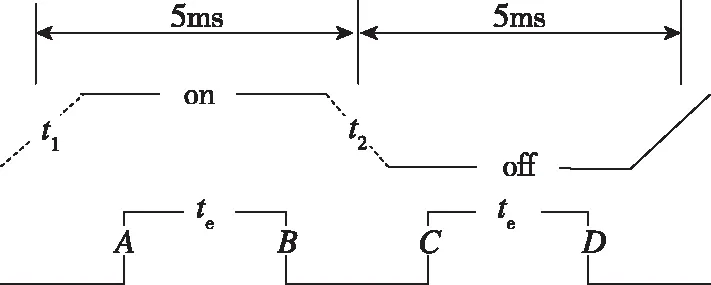
图8 成像与信标编码时序图Fig.8 Timing of imaging and beacon coding
工作过程中,合作信标与成像解调为两个独立系统,根据使用场景的不同,设计了三种同步方式。
(1)硬同步
使用中,两个系统通过IO线进行连接,分为主从机,由主机发送计时零点信号,实现两个系统的同步,同步完成后即可断开IO线。
(2)无线通信指令同步
前文所述的调制驱动电路包含无线通信模块。无线通信模块包含编码调制延迟与信道延迟,可通过实验室测量得到发送延迟tx(发送端开始发送到接收端完成接收经过的时间)与接收延时rx(接收端发送响应开始到发送端接收完成经过的时间)。
发送与接收延迟的测量值存在一定的误差,只能保证一段时间内的同步具有可靠性,需要每隔一定时间进行一次同步处理,以保证调制与解调系统的长时间稳定同步。
(3)成像解调自适应同步
在不进行系统同步的情况下,除图9所示的理想成像时序关系外,还包含图10所示的成像时序关系:成像窗口不在on、off的稳定区间内。

图9 发送延迟和接收延迟Fig.9 Delay of sending and receiving
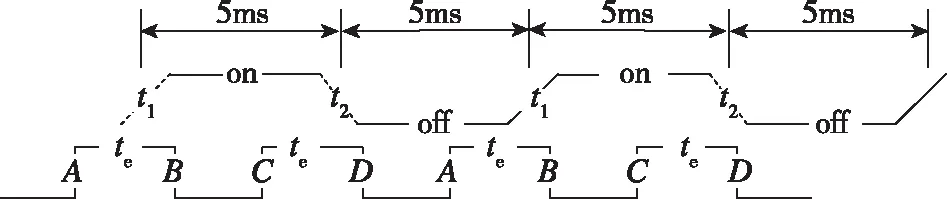
图10 成像时序关系Fig.10 Timing of imaging
系统开始工作后,编码调制端以200Hz的频率输出调制光信号,成像解调处理组件首先采集图像进行处理,定位候选信标位置,然后以一定的步长调制曝光时间点A,当连续两帧图像都呈现出亮暗的规律时,同步完成,否则重新选择候选信标点进行处理。
2.2 信标定位与识别算法
信标定位与识别算法包含三部分:信标定位、成像解调同步和信标调制识别。
(1)信标定位
解调端配置好曝光时间等成像参数后,发送关闭信标指令,采集图像,解调端发送开启信标指令,采集图像;对上述两帧图像进行处理,如果某个区域发生亮斑的闪烁,可标记为候选区域,执行一次亮暗交替后,提取候选区可能有多个,可重复3次这个过程,初步进行筛选。信标定位流程如图11所示。
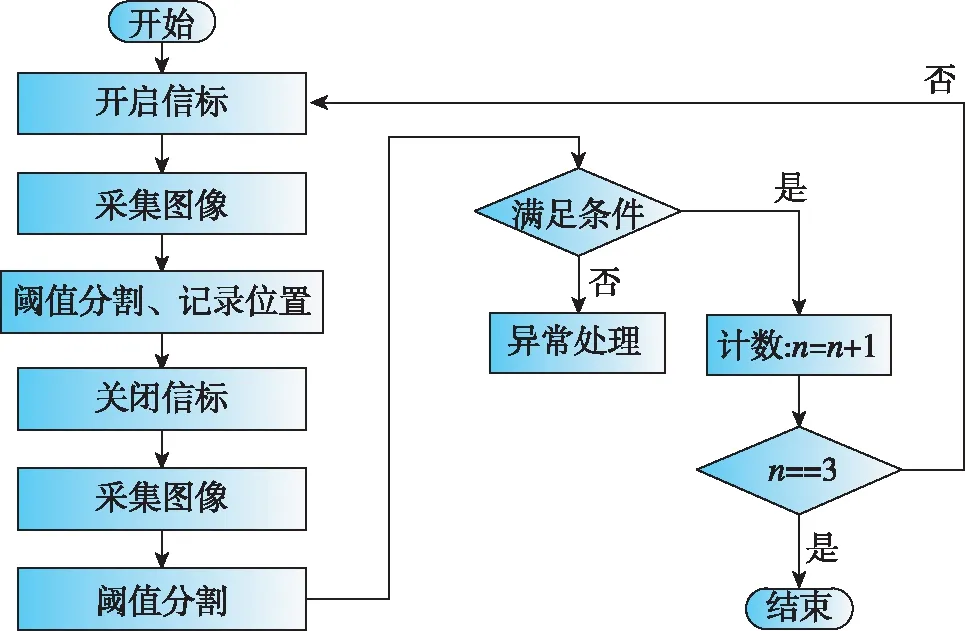
图11 信标定位流程图Fig.11 Process of beacon positioning
闪烁亮斑提取方法可采用直接阈值分割法和差后阈值分割法,闪烁亮斑的判别条件包含闪烁、大小、亮度、外形等特征。
直接阈值分割法的处理流程为:首先对信标开启时采集的图像进行阈值分割,得到多个目标区域并记录,然后采集信标关闭时的图像,在上一步的记录位置上进行阈值分割,如果没有分割目标则标记该区域为候选目标点。该方法适用于背景干扰较少的情况。
差后阈值分割法采用先做帧间差分后分割的处理方式,具有较强的抗干扰能力。设信标开启时采集的图像为fk,信标关闭时采集的图像为fk+1,T为阈值,x、y定义为像素坐标。
(2)
若信标开启后的图像与信标关闭后的图像差大于等于阈值T则标记为1,否则标记为0,最终得到二值图像,对二值图像进行区域分割得到候选目标区域。阈值分割测试如图12所示,图12(a)为有背景干扰情况下,信标开启时的成像图,图12(b)为信标关闭状态下的成像图,图12(c)为差后阈值分割结果图,可见该方法可有效去除背景干扰,准确提取信标区域。
(2)成像解调同步
信标定位完成后,进入成像解调同步流程,参考前文所述的同步方式,如果是硬同步或无线通信指令同步,可直接进入信标精确识别流程;如果是成像解调自适应同步,则需按流程进行成像端的成像时间基准调整。成像解调自适应同步处理流程如图13所示。首先配置好信标的光功率与开关频率,配置成像传感器的成像频率与开关频率相同,曝光时间小于2.5ms,并随机配置一个成像时间点。连续采集两张图像,在信标区域进行处理,参照图10,移动曝光时间点,第一次出现亮暗交替时记录时间点tm0,然后继续移动曝光时间点(约束最大移动时间为5ms),当出现暗亮交替时记录时间点tm1,此时的tm1即为同步时间点。

(a)有干扰

(b)信标关闭
(c)分割结果
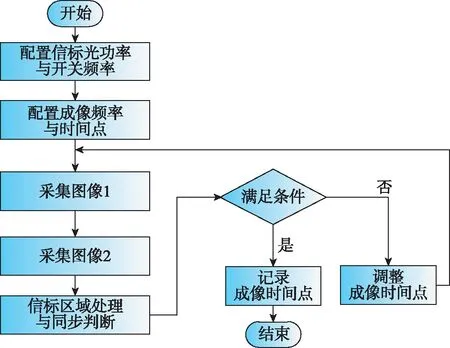
图13 自适应同步处理流程Fig.13 Process of adaptive synchronization
(3)信标调制识别
在完成上述信标定位与同步后,还需要进行最终的信标调制识别,以更加准确地提取信标。处理流程为:解调端发送调制命令,信标进行响应,如果正确解调到所需的调制信号,则上文定位的信标是正确可靠的。
3 实验验证及结果分析
3.1 调制驱动电路测试
驱动电路的开关时间测量结果如图14所示,上升时间小于50μs,下降时间小于50μs,满足调制所需频率要求。

图14 驱动电路上升时间与下降时间Fig.14 Rising time and falling time of driving circuit
如图15所示调频输出测量结果,调制频率分别设定为200Hz、100Hz和50Hz,输出信号变化与设定频率一致。
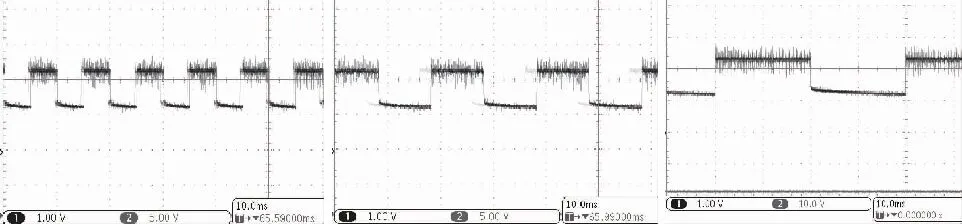
图15 调频输出结果Fig.15 Frequency output
3.2 工作距离测试
图16(a)、(b)、(c)分别为1km、2km、3km距离下,图像传感器采集到的图像,传感器曝光时间为200μs,激光光源输出功率为30W,信标成像清晰稳定。实验结果表明,设计的光源满足工作距离要求。

(a)1km测试

(b)2km测试

(c)3km测试
3.3 解调识别测试
图17所示为200Hz频率编码测试,编码为10~1010,解调同步后的成像端顺序采集6幅图像,信标区依次成像亮、暗、亮、暗、亮、暗,即10~1010,与编码码字一致。干扰目标解码后为11~1111,可有效去除。
图18所示为偶校验编码测试,原始信息数据为110,根据编码规则,码字为10~1100,解调同步后的成像端顺序采集6幅图像,信标区依次成像亮、暗、亮、亮、暗、暗,即10~1100,与编码码字一致。干扰目标解码后为11~1111,可有效去除。
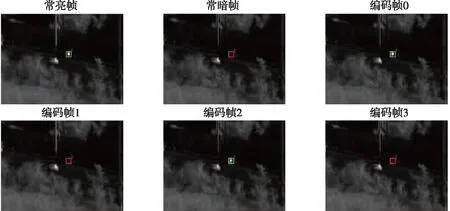
图17 频率编码测试Fig.17 Frequency code test
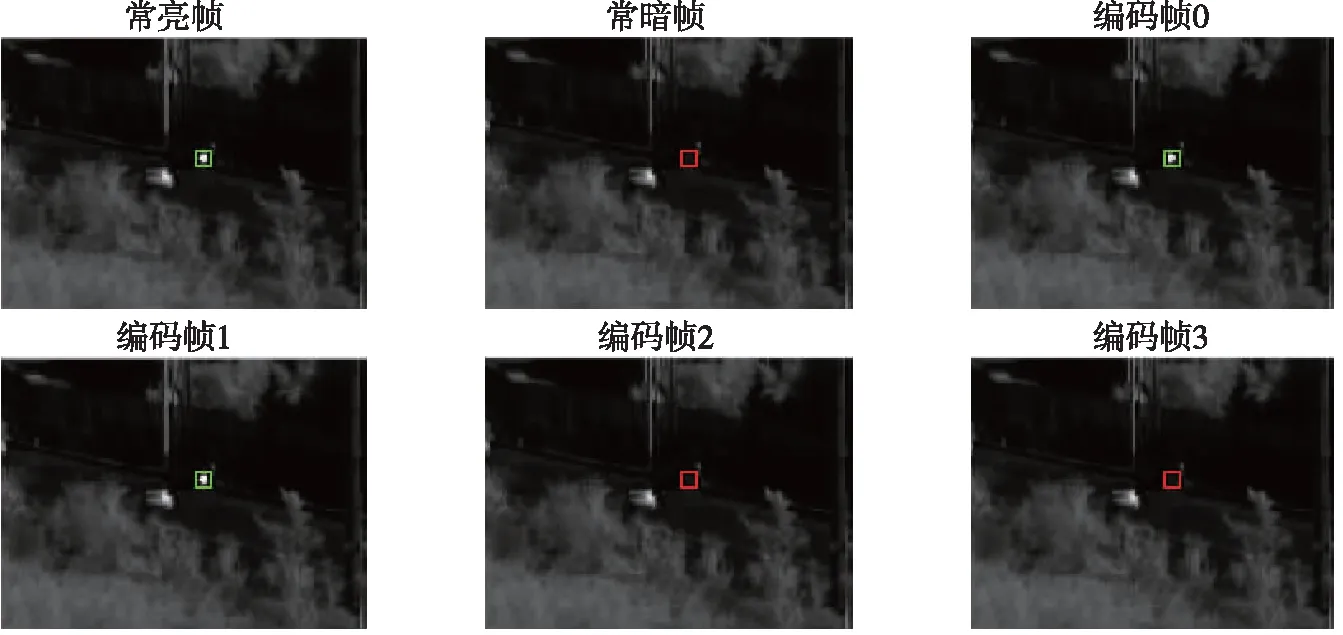
图18 偶校验码测试Fig.18 Parity check code test
4 结 论
本文对传统信标光源存在的不足进行了探讨,引入半导体激光器作为信标光源,对激光光源的特性进行研究后,设计了相应的驱动调制电路,并验证了驱动调制电路的性能;设计了调制解调耦合算法,并通过实验完成了调制与解调的实现过程,在存在干扰源的情况下,实现了合作信标的准确识别。以上研究与实验表明,文中所述激光信标能够满足应用要求,设计的调制解调算法可极大地提高目标的识别准确性与抗干扰能力。