基于遗传算法的深水无隔水管钻井液举升系统锚泊定位方案优化*
2022-02-02王磊张辉柯珂邓嵩
王磊 张辉 柯珂 邓嵩
(1.中石化石油工程技术研究院 北京 102206;2.常州大学石油工程学院 江苏常州 213164)
北极及亚北极极地冷海区域蕴藏着丰富的油气资源,随着陆地和浅海传统油气资源勘探开发程度的不断提高和可采资源的逐步衰竭,非常规油气和极地深海油气资源成为了重要的接替,因而深水油气田开采技术与设备的研究,一直是石油行业发展的重点[1]。然而,极地冷海区域的钻井开发面临着严苛的环保要求。传统的深水钻井表层井段采用的是开眼循环钻井方式,钻井液及岩屑会直接排入大海,而这种方式难以满足极地冷海“零排放”的环保要求。为了适应低温深水的钻井作业环境,并符合极地冷海区域的环保要求,在低温海洋中创新实施了无隔水管钻井液回收(RMR)技术[2]。
但是海洋的复杂环境载荷以及作业载荷会对立管产生作用,具体表现为外部横向载荷的存在使立管运动状态改变,以及管线对立管产生干涉作用,严重的干涉作用将会导致RMR钻柱与钻井液回流管线发生碰撞。为避免碰撞,在深水中应用RMR系统进行表层无隔水管钻井时,就需要过锚定系统固定较长的钻井液回流管线[3]。近年来,国内外一些学者对RMR钻井系统钻井液返回管线海底锚泊方案做出过研究[4-7],王国栋等[8]提出了一种适合深水条件的钻井液返回管线海底锚泊方案并对该方案进行原理分析和结构设计;陈国明等[9]则提出了一种用于无隔水管海底钻井液举升钻井的海底锚泊定位装置,但鲜有针对深水钻井钻井液举升系统锚泊定位方案方面的研究。影响深水钻井的钻井液举升系统的锚泊定位方案制定的因素很多,主要包括立管的受力、干涉情况以及钻柱与回流管线的碰撞临界条件等,因此,制定合理的锚泊定位方案的是极地钻井作业中较为复杂也是极为关键的一步[10]。
现有技术大多根据钻井液返回管线的实际工作要求,根据现有的工程经验从结构设计的角度对深水锚泊定位方案进行改进,往往需要提出多种方案并通过大量的工程分析进行方案的优选,无法迅速找到最优的设计方案,而本文采用遗传算法,建立了钻井液返排回流(MRL)海底锚泊定位模型,对深水钻井钻井液举升系统进行优化,并进行了实例的模拟与分析。
1 锚泊定位方案模型建立
1.1 力学模型
1)海流力和波浪力。
钻柱及回流管线受到的横向载荷主要是波浪力和海流力。海水中的小尺寸直立圆柱体其单位长度所受到的波浪力一般可用Morison公式计算:
2)涡激振动。
涡激振动作用在立管横流方向的载荷F(z,t),可以用下式计算:

式(2)中:z为海水的深度,m;CL0为初始升力系数,无量纲;D是管柱外径,m;q为尾流变量,无因次;x为管柱的横向偏移,m;t为时间,s。
3)地基反力。
水平地基反力p(y)可由p-y曲线法得出:

极限地基反力pu由下式计算:

4)导管的有效轴向力。
导管的横向位移和变形时,需要考虑导管截面的轴向力。考虑导管的轴向力时需要考虑土层施加给导管的竖向摩擦力,因此需要计算单位面积管侧极限摩阻力fs。单位面积管侧极限摩阻力的计算方法包括α法、β法、λ法等,本研究采用λ法计算导管的管侧摩阻力。由Vijayvergiya和Focht(1972)根据实测数据给出,考虑了土的有效上覆压力及不排水抗剪强度两种因素对管侧摩阻力的影响,其表达式为

式(5)中:σ′v为海底浅层土的有效上覆土压力,Pa;Cu为饱和黏土的不排水抗剪强度,Pa;系数λ是桩长l的函数。Lagon(1982)通过实测统计认为

式(6)中:l为桩长,m。
另外,浅层管柱(导管和浅层套管,不含内部的技术套管)由于受到井口悬挂负荷的重载压持,整体处于受压状态,有效轴向力为压力,取受压的有效轴向力为负值。在计算有效轴向力时,浅层管柱与立管的主要区别是浅层管柱受到土壤竖向的摩擦力;此外,相比于立管的侧向弯曲,浅层管柱的侧向弯曲幅度很小,所以可以忽略由于管体侧向弯曲而导致的管体中心轴线变化产生的附加轴向力。浅层管柱的有效轴向力计算公式如下:

式(7)中:ρm为钻井液密度,kg/m3;Te(z,t)为深度z处t时刻浅层管柱的有效轴向力,N;Ttop(t)为t时刻泥线处浅层管柱的轴向力,N;We(z,t)为深度z处t时刻单位长度浅层管柱的实际重量(包括导管、各层套管和水泥环的重量及管内流体的重量),N/m;Fmf(z,t)为单位长度管体所受的管内流体沿管体轴向流动产生的摩擦阻力(取向上为正值),N/m;Aci为浅层管柱的内部流道截面积,m2;Dco为浅层管柱的外径,m。
1.2 数学模型
对于一个求函数最大值的优化问题(求函数最小值也类同),一般可以描述为下列数学规划模型:

式(8)中:X为决策变量;maxf(X)为目标函数式;X∈R、R⊂U为约束条件;U为基本空间,R为U的子集。满足约束条件的解X称为可行解,集合R表示所有满足约束条件的解所组成的集合,称为可行解集合。
如图1所示,返排管线的锚泊定位位置,是决定返排管线在各种工况下与钻杆是否发生碰撞的决定性因素。平台偏移和升沉问题会对管柱产生一定的影响。仅考虑平台偏移作用时,假设海流为0,在海洋作业中,通常用平台相对海底井口的偏移量与水深的百分比来描述平台的偏移情况。本文假设平台偏移量为水深的1%,在水深和平台偏移量不变的情况下,送入管柱下端的轴向载荷越大,其顶端产生的弯曲应力越大,当平台偏移量与水深的比值为固定值时,送入管柱顶端的弯曲应力随着水深的增加而逐渐增大,并且随管柱轴向载荷的增大,水深对弯曲应力的影响逐渐减弱。此外,当钻井平台的升沉振幅相同并在作业管柱固有周期附近振动时,水深越大产生的振动载荷越小,由于本文的主要研究对象为深水钻井,并假设钻井平台的升沉振幅相同并在作业管柱固有周期附近振动,因此不考虑平台偏移和深沉问题的影响。由于返排管线倾斜放置,返排管线的静力偏移主要受到海流力、管柱重力、返排泵的位置、返排管线的倾斜角等因素的共同影响。这也就使得返排管线的静力偏移平步随着底部锚定位置的增大而单调增大(即增大返排管线底部锚定位置便可避免钻杆和返排管线之间的碰撞)。在众多影响因素当中,海流力可以采用极端条件下的数值进行计算,这使得管柱的尺寸、返排泵的位置共同影响了返排管线底部锚定位置不同时的静力偏移程度[11]。

图1 无隔水管锚泊定位示意图Fig.1 Schematic diagram of mooring positioning without riser
这里以钻杆和返排管线不发生碰撞时(钻杆和返排管线任意位置处的间距大于等于零)返排管线底部位置和水下井口间的距离(La)最小为最优化目标,以顶部张力(Tmrl)、返排管线的外径(do)、返排管线壁厚(τmrl)为求解集合。
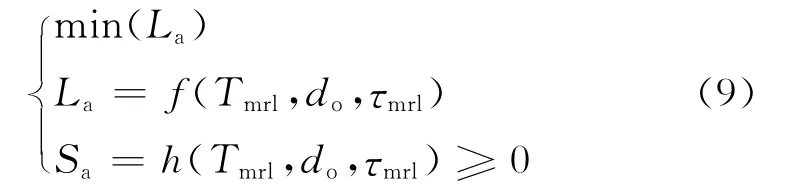
式(9)中:La为返排管线底部位置和水下井口间的距离,m;Tmrl为顶部张力,k N;do为返排管线外径,mm;τmrl为返排管线壁厚,mm;Sa为钻杆与反排管线的间距,m。式(9)中的f(Tmrl,do,τmrl)并不是一个直接的函数,一方面是无法直接表示,另外锚泊位置并不是返排泵相对位置和返排管线的外径的直接函数,即没有办法通过分析从返排泵相对位置和返排管线的外径求出锚泊位置,但它是本问题求解的目标函数;h(Tmrl,do,τmrl)也不是一个直接的函数,它代表了的管柱静力以及尾流干涉等力学作用的影响。
2 锚泊定位方案遗传算法模型建立
2.1 遗传算法运算过程
遗传算法(Genetic Algorithm)是一类借鉴生物界的进化规律(适者生存,优胜劣汰遗传机制)演化而来的随机化搜索方法,其具体计算步骤如图2示[12-13]。
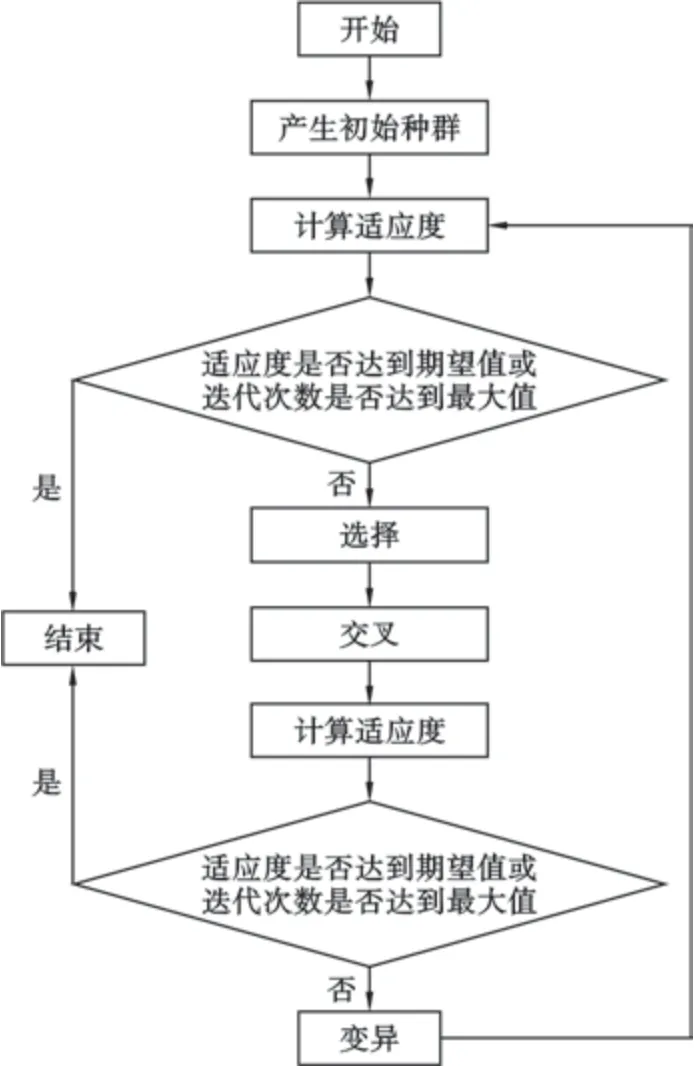
图2 遗传算法计算步骤Fig.2 Calculation steps of genetic algorithm
2.2 遗传算法的个体基因
1)Tmrl是返排管线的顶部张力,在顶部张力设计时会给出一定的范围,可以此范围作为其初始集合。假定顶张力的范围在500~700 k N,则600 k N的基因型为
2)do是返排管线的外径,一般在50~200 mm,这里直接以其单位为毫米时的数值作为基因型。例如直径127 mm的基因型。
3)τmrl是返排管线的壁厚,通常对于确定的外径,只有几种与之相匹配壁厚尺寸,可以在优选后选择相近的尺寸作为最终尺寸。假设壁厚的范围在9~20 mm,则10 mm的基因型。
将三段基因串联到一起则可得到一个基因型,例如499 513 091。
2.3 产生初始个体种群
上述的基因型,可以随机生成一段9位的数字,即为一个个体的基因。一般种群的数量设定在10~200,少了算法稳定性差,多了增加计算量且求解能力不是线性提升。
2.4 生成新一代个体种群
生成新一代个体种群的方式分为交叉、变异,通过自然选择决定遗传的方式。
1)交叉:交叉运算是遗传算法中产生新个体的主要操作过程,它以某一概率相互交换某两个个体之间的部分染色体。例如基因型125 874 513和215 830 187,假设断点选择第4个数字后,则交换后的基因为1 258-30 187和2 158-74 513。则产生了新的下一代个体的基因。
2)变异:个体的基因有一定的概率发生变异,传给下一代的基因发生变化。例如基因型125874513,随机产生变异点取7时,将第2个位置处的数值随机替换,生成进行基因型,例如125 874-3-13。
3)自然选择:排名法是通过每个个体的适应度排名来看的,排名越靠前越不容易被淘汰,排名法的计算法复杂度相对较低,故本文选用排名法:

式(10)中:Pi是第i个个体被淘汰的概率;Ri是第i个个体的适应度排名;N是种群个体数。
2.5 适应度计算
遗传算法中以个体适应度的大小来评定各个个体的优劣程度,从而决定其遗传机会的大小。通常可利用目标函数值作为个体的适应度。同时还满足约束条件sa=h(lup,llp,dm,La),不满足约束条件的个体直接淘汰,并生成一个新个体补充。
3 实例分析
以亚北极极地冷海区域某作业区1 500 m水深的某低温钻井作业为例,采用上述基于遗传算法的优化方法进行锚泊定位方案的优化。
3.1 无立管钻井液回收作业管柱静、动力学分析
RMR钻井管柱与钻井液回流管线的静力学分析,以钻井管柱和回流管线为研究对象,研究二者在海流力作用下的顺流向偏移程度,此偏移量为双立管在静力稳定条件下是否发生接触的判定标准。静态分析和动态分析所采用的实例数据如表1、2所示。

表1 静态分析实例数据Table 1 Example data of static analysis
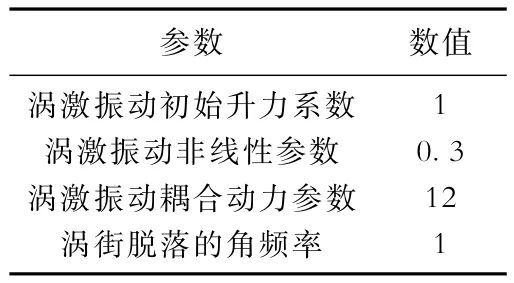
表2 动态分析实例数据Table 2 Example data of dynamic analysis
3.2 锚泊定位方案优化
基于上述模型方法对该算例锚泊定位方案进行优化。
1)产生初始个体种群。
随机产生十个个体,其基因型和表现型如表3所示。随后,产生新一代个体种群,这里直接以La的值作为适应度,按约束条件Sa=h(Tmrl,do,τmrl)计算分析,求得每个个体的最小La。求解方法为:对每个个体进行考虑干涉作用的立管和返排管线的静力偏移计算,其中La从小到大间隔10 m取值,直到得到满足约束条件的La即为该个体的适应度。
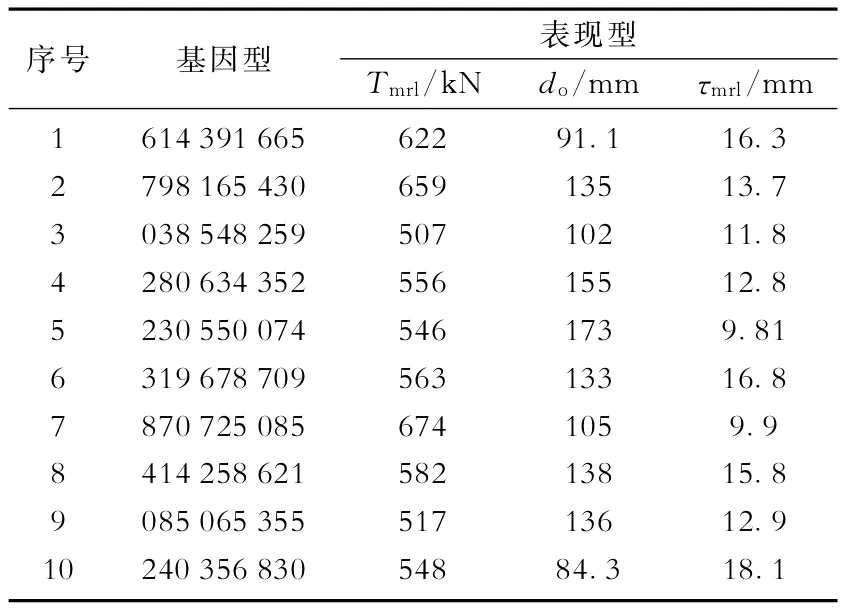
表3 初代个体基因型和表现型表Table 3 Genotype and phenotype of first generation individuals
通过交叉遗传,让剩余的个体产生下一代。交叉点的位置设置在1、4、7个数字,选择2个个体在随机位置交换基因。变异点的位置设置为第8个数字,变异概率为0.15。产生的新一代个体如表4所示。
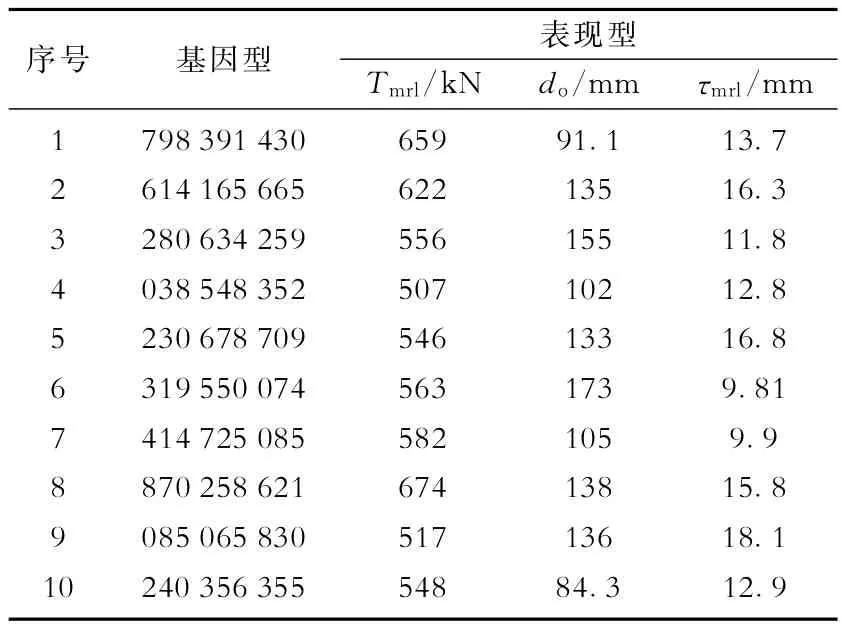
表4 新一代个体基因型和表现型Table 4 Genotype and phenotype of new generation individuals
同样的,可以通过此方法不断生成新一代个体。
2)最优解。
取第50代的种群,如表5所示。从表5中可看出个体7的La值最小,即La=302 m为最优,个体7的表现型为最佳锚泊方案。采用该方案,返排管线顶部张力为617 k N,返排管线外径为101 mm,返排管线壁厚为9.11 mm,其静力偏移结果如图3所示。
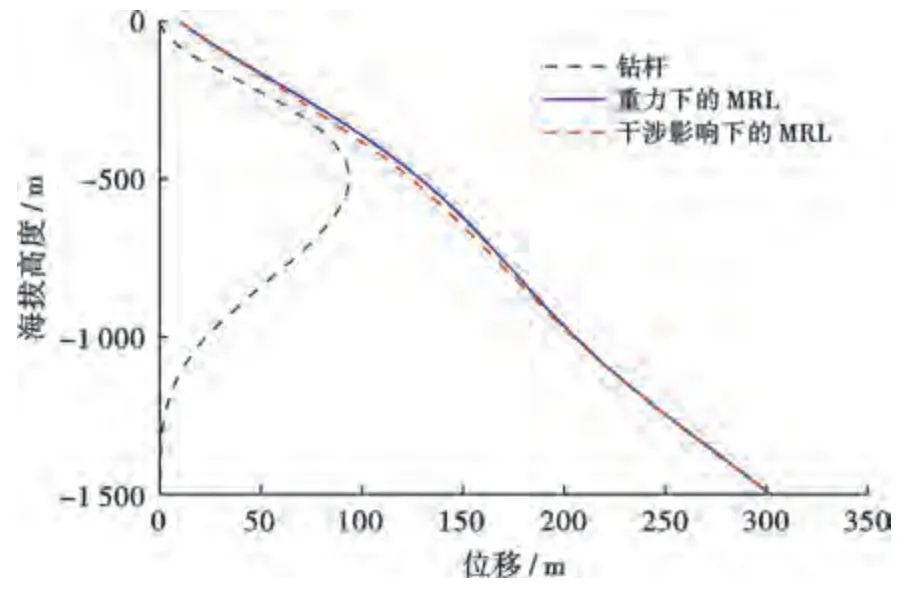
图3 第50代个体7的静力偏移分析Fig.3 The 50th generation static analysis of individual migration
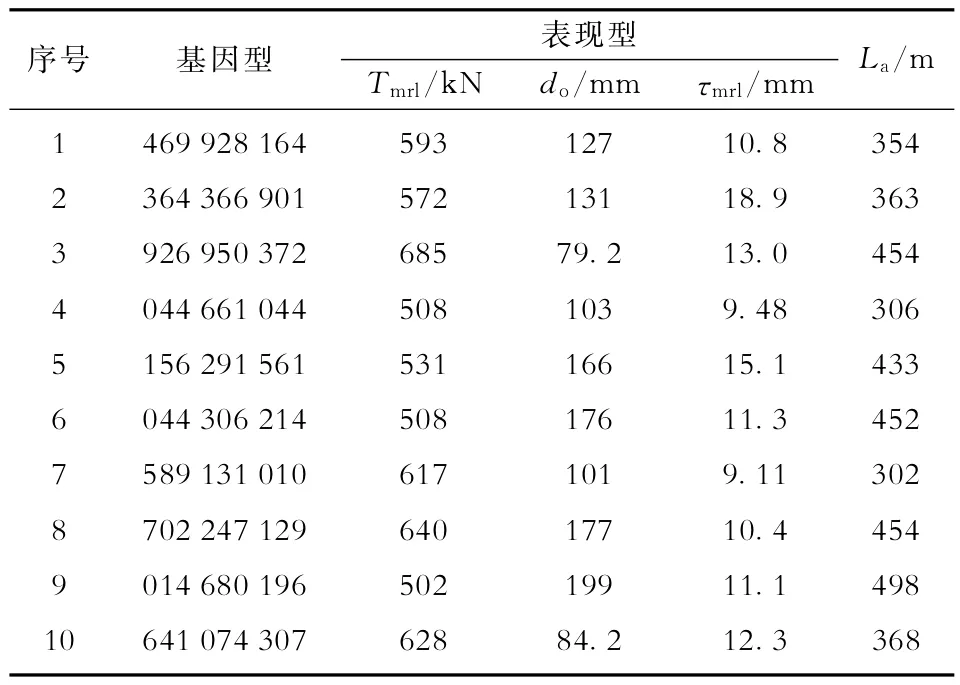
表5 第50代个体基因型和表现型Table 5 Genotype and phenotype of individuals of the 50th generation
4 结论
1)建立了一种基于遗传算法的锚优化泊定位方案的模型,该模型以钻杆和返排管线不发生碰撞时返排管线底部位置和水下井口间的距离最小为最优化目标,以返排泵相对位置、返排管线的外径为求解集合。
2)遗传算法可用于优化MRL海底锚泊定位模型,可以直接以目标函数作为搜索信息,能够快速确定锚泊定位方案的最优解,节省大量工程计算时间在求解过程中要注意个体基因、遗传机理、最优化函数以及约束条件的合理运用。
3)实例分析表明,基于遗传算法优化过的深水钻井钻井液举升系统可以满足工程要求,较为合理,充分验证了该方案的可行性。