配电网无功补偿协同优化混合算法设计和应用
2022-02-02韩国华
韩国华
(国网吴忠供电公司,宁夏 吴忠 751100)
早期的配电供电网络运行在较低的电压等级(6 kV/3 kV),变压器容量较低,因线损影响,在电阻性负载用电过程中用电末端压降明显。随着电网基础建设工作的逐渐推进,10 kV配电供电网络已基本普及,变压器容量完全可以满足需要,但抗性负荷在用电终端的占比逐年增加,导致无功功率在居民用电环境中造成升压效应及相位偏移效应,成为困扰当前用电网络的核心问题,因此需在用电网络末端构建无功补偿系统。随着智能电网建设的推进,基于自动投切的配电网无功补偿系统也大量部署,但面临的更严峻的问题是在相互影响的电网10 kV母线上,多个自动投切系统可能同时进行自动投切,导致电网过调,使无功补偿系统给电网带来不可忽视的谐波干扰。
胡习部[1]发现无功补偿装置是10 kV电网节能技术的核心表达模式,只有在10 kV网络中部署有效的无功补偿设施,才能确保实现本质化节能;李智等[2]研究了一种自适应虚拟阻抗模式下的垂控策略,可以让10 kV配网的无功管理技术得到提升。赵冬梅等[3]研究了一种梯度策略,对同网无功补偿器的联动控制进行技术革新;赖纪东等[4]研究了一种粒子群优化算法,对提升10 kV微网的孤岛无功补偿器进行去中心化自协同管理。在现有配电网无功补偿研究中,算法优化的研究尚未成熟,无法有效解决无功功率在居民用电环境中造成的升压效应及相位偏移效应,成为困扰当前用电网络的核心问题[5]。为此,本文选择一种无功补偿协同优化混合算法,对无功补偿器投切算法进一步优化,以减少同网无功补偿器的过调,增加电网无功补偿的可靠性和稳定性。
1 自动投切无功补偿器的实现模式
1.1 传统的无功补偿器构成
传统的无功补偿器包含多组由电容器补偿同步调相机(SC)、无功补偿控制器(FU)、晶闸管投切电容(TSC)、保险座(FV)、电容器开关(TV)、并联电容器(C)、电抗器(L)构成的投切式无功补偿器模块和一组由固定电容器(OC)、固定电抗器(OL)组成的固定式无功补偿器模块,该系统早期由人工进行投切,后期通过自动投切装置和自主调节投切式无功补偿器模块进行控制。传统无功补偿器构成如图1所示,其完整回路如图2所示。

图1 传统无功补偿器构成示意图

图2 无功补偿器完整回路
传统无功补偿系统有以下特征:1)单相操作,即该无功补偿模块的作用范围为配网中的一相而非三相,投切过程中可能使某一相的无功状态改变而造成中性点位移;2)同步响应,即在自动投切模式下,当系统发现某一相无功增加时,电网内的多个无功补偿自动投切装置可能均作出相同策略,但同步操作可能造成电网过调[6-7]。
对单台无功补偿器来说,可以通过无功补偿控制系统实现对回路中电流互感器和电压互感器信息的控制,以此判断无功功率变化,如果是在模糊控制矩阵控制下,可通过控制投切式无功补偿模块实现回路中无功功率的补偿操作[8]。该控制矩阵将在下文中分析。
1.2 本文研究的个案
本文以某城市某拉手回路的分布式无功补偿系统为例,该线路总容量为12 kVA,有10 kV用电接入点69个,用电容量超过2 kVA的网点4个,其余用电网点容量在0.3~1.2 kVA,在4个超过2 kVA容量的10 kV用电母线上布置自动投切无功补偿系统,如图3所示,用于平衡该10 kV拉手回路中的无功功率。

图3 分布式无功补偿示意图
该回路实际容量为12 kVA(120 kW),根据日常运行数据计算,其理论无功功率最高为20 kW,4个分布式无功补偿装置的最大无功补偿功率为8 kW(0.8 kVA),由40个投切式无功补偿模块实现,每个投切式无功补偿模块的无功补偿能力均为0.2 kW(0.02 kVA),即在理论值下,4个分布式无功补偿装置的160个投切式无功补偿模块只需投入100个,亦即平均每个无功补偿装置投入其40个投切式无功补偿模块中的25个即可满足该拉手回路的无功补偿需求。
1.3 无功补偿控制器的实现
无功补偿控制器包括一个智能电能表模块和一个自动投切策略模块,其中智能电能表模块根据电流互感器后置的电流比较器获得的电流数据绘制电流波形图,根据电压互感器后置的电压比较器获得的电压数据绘制电压波形图,波形图绘制模块采用的是ARM嵌入系统,该系统具有较强的计算能力[9]。该嵌入系统获得波形图后,与标准波形进行比较,获得其相位角位移量,并将该位移量和总实时功率输出到自动投切策略模块中,由自动投切策略模块决定投切式无功补偿模块的投切策略。其硬件构成如图4所示。
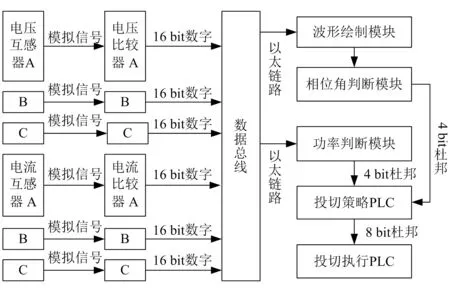
图4 无功补偿控制器示意图
图4中,波形绘制模块、相位角判断模块、功率判断模块的设计通过ARM嵌入系统实现,采用PLC系统实现投切策略模块设计,同时由无功补偿系统内部PLC实现投切执行PLC。最后由太网桥的工业网络交换机进行数据总线整合。
2 自动投切装置的算法升级研究
2.1 传统算法的模糊控制矩阵
传统算法中,在投切策略PLC中使用3个模糊控制矩阵对最终投切策略进行模糊控制,对功率判断使用模糊矩阵A,对相位判断使用模糊矩阵B,对上述两个模糊矩阵的输出值使用模糊矩阵C判断最终操作方案。
模糊矩阵A的模糊策略详见表1。表中A~G分别表示状态A~状态G。
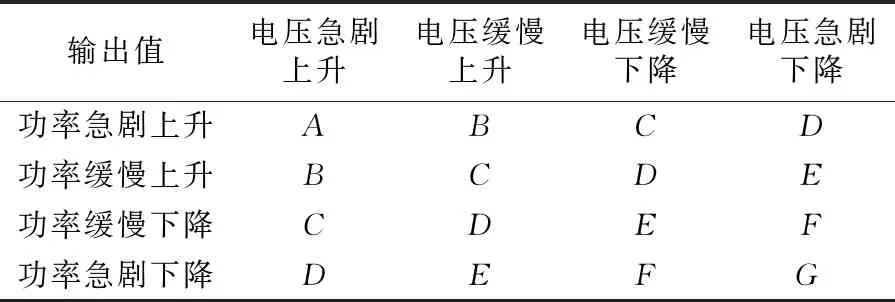
表1 模糊矩阵A模糊策略表
模糊矩阵B的模糊策略详见表2。
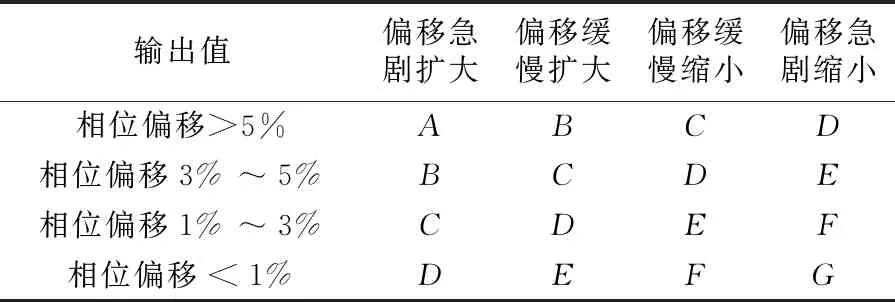
表2 模糊矩阵B模糊策略表
模糊矩阵C的模糊策略详见表3。
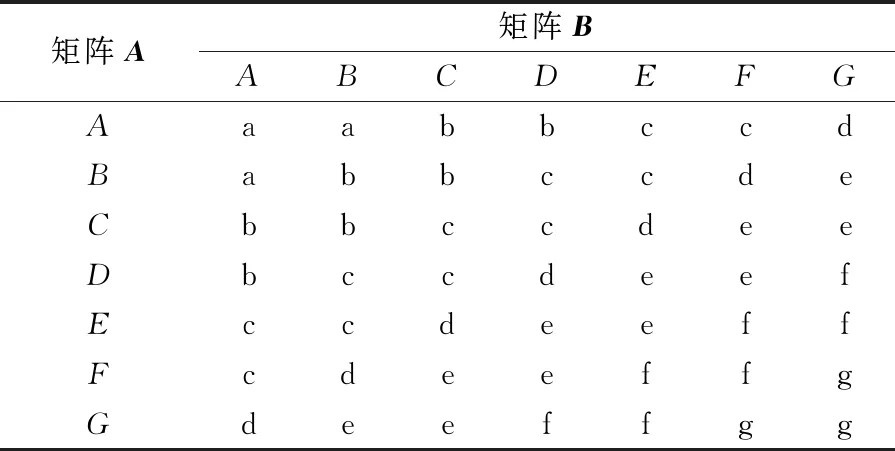
表3 模糊矩阵C模糊策略表
对于模糊矩阵C的输出值,依照表4对其解释。
当投切执行PLC得到投切策略PLC发出的投切策略后,会自动比较当前投切式无功补偿模块的投切状态,选择未投入的投切式无功补偿模块投入或切除已投入的投切式无功补偿模块。当其收到投切式无功补偿模块投入请求但剩余未投入投切式无功补偿模块资源不足时,会将所有的投切式无功补偿模块全部投入[10]。反之,当其收到投切式无功补偿模块切除请求但已投入投切式无功补偿模块数量不足请求量时,会将所有投切式无功补偿模块切除。
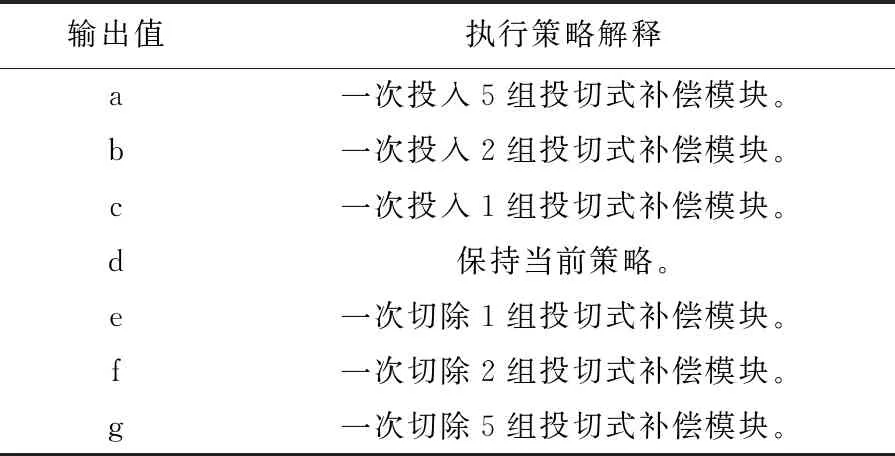
表4 模糊矩阵C输出值的解释结果表
2.2 传统算法模糊控制矩阵的不足
当系统中存在多组自动投切无功补偿装置且系统中出现较大的无功功率扰动时,可能会出现多组自动投切控制器发现系统的模糊矩阵A和模糊矩阵B同时报出A状态或者B状态,此时模糊矩阵C会发出A状态或者B状态的调控策略,具体策略见表3。以本文个案为例,系统内部署了4套独立的自动投切无功补偿系统,此时系统的调节功能会被放大4倍。当4套自动投切无功补偿系统同时执行A状态调控策略或者B状态调控策略时,可能导致4套自动投切无功补偿设备同时在模糊矩阵A和模糊矩阵B中同时报出A状态或者B状态,这时4套自动投切无功补偿设备的模糊矩阵C再次做出A状态或者B状态的调控策略。4套自动投切设备会同时出现系统过调问题,系统反复在A状态、B状态之间快速投切、转换。这种过调故障的出现在同一配网中部署多套自动投切设备时更加显著。
因此,传统模式下通过增加系统容忍度、加大投切延迟、错峰调控等方式实施控制,即在孤岛式多机联动的自动投切无功补偿设备应用下,采用粒子群算法或者蚁群算法实施控制。但这种模式会导致系统的无功补偿自动投切响应周期增加,或对系统内的无功功率的容忍度增大,导致系统对无功功率的补偿效率降低[11]。
2.3 分布式自动投切无功补偿系统的并网方案
结合图3与图4,本文个案中的4套分布式自动投切无功补偿系统使用相对独立的PLC系统进行自动投切策略计算,如使用MPLC-16系统,其输入和输出均占用8个针脚,所以其输入输出均存在系统冗余,利用该冗余在系统外可采用一个控制器并网策略,如图5所示。

图5 控制器并网策略示意图
以上控制器并网策略存在FDDI总线,容易导致系统延迟15~25 ms,按照最大25 ms计算,所有投切策略PLC操作延迟应不低于25 ms。此系统延迟约为1.25个工频50 Hz波形周期。在该操作延迟基础上,当任何一个PLC率先发现动作时机时,先向控制网发出一个动作抑制广播,25 ms后如未收到其他3个自动投切无功补偿系统发出的动作抑制广播,即开始并网动作。若收到动作抑制广播,则再次回到策略生成环节。该操作抑制算法如图6所示。
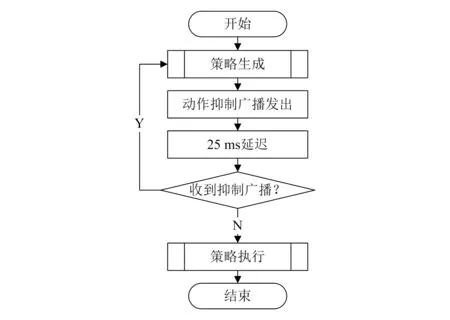
图6 操作抑制算法示意图
该算法的策略生成环节即为上文提到的表1~表4执行策略,其主要优化是在投切策略生成后至投切策略PLC向投切执行PLC发出指令前通过延迟进一步实施策略判断。此举可以最高效率增加分布式无功补偿系统的响应效率,且可以避免多机同步动作造成的系统无功功率过调[12-13]。经过测算,常规控制器的调控延迟在10~15 ms,如果增加这一操作延迟,可能造成其中一套无功补偿设备投切式无功补偿模块资源出现大量消耗,与此同时低响应级别无功补偿设备的投切式无功补偿模块也会存在资源空置情况。而就算是对其采用动态优先级策略,仍然需要实现多台自动投切无功补偿设备的并网操作[14-15]。经过本次升级处理后,即将控制器的调控延迟增加到35~40 ms,系统投切效率和人工投切效率相比依旧具备显著优势,同时也有助于减少资源消耗。
3 执行本文算法优化后的系统测试
对传统模式下4机联动的自动投切无功补偿系统和本文算法优化后的4机联动自动投切无功补偿系统进行测试,结果如图7所示,由图可以发现,算法优化前微网内的无功功率出现扰动后,系统在20 ms内便开始并网,系统运行效率远高于算法优化后,但因为测试过程中所采用的无功功率扰动幅度和升压效应20 V的大幅度扰动较为接近,所以算法优化前系统出现了过调,其实际无功补偿在70 ms内进行了5次,最终将无功升压效应控制在-3 V。算法优化后,系统在发生无功功率扰动后约42 ms开始进行无功补偿,一次补偿后,系统无功功率扰动的电压即从+20 V调整到了约+1 V。
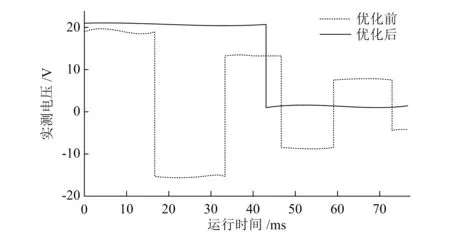
图7 两种算法仿真结果图
可见,算法优化前无功补偿的并网动作效率较高,可以在20 ms内完成第一次补偿动作,但一旦发生过调,系统自恢复时间较长,可能超过70 ms。算法优化后,虽然系统的第一次无功补偿较算法优化前延迟,在42 ms后才进行第一次无功补偿,但在较大无功功率扰动的情况下,可以避免系统过调,实现无功功率的快速补偿。
4 结束语
本文个案微网中4套自动投切无功补偿设备采用投切策略PLC并网方式,通过控制效率分析发现,这一方法可以通过动作抑制信号收发控制实施互锁操作,从而避免传统算法下的无功补偿过调。仿真中,分布式自动投切无功补偿系统可以在+20 V无功升压效应下,让系统的自恢复时间大幅度缩短。更重要的是,该系统可以减少多台自动投切无功补偿设备的系统过调,最大程度提高电网的可靠性和稳定性,避免因系统不收敛出现过调带来的系统崩溃和跳闸现象。