基于多时相点云数据的输电走廊地物变化检测
2022-02-02王和平刘成强马春田田茂杰李致东
胡 伟,王和平,刘成强,马春田,田茂杰,王 宁,李致东
(国网通用航空有限公司,北京 102209)
随着人类社会的发展和电力行业的不断扩大,电力工程已成为一项促进国民经济发展的工程。输电线路作为电力电网运行的基础,其安全性直接关系到整个电网运行的命脉,故输电线路走廊的合理设置非常重要。考虑到我国幅员辽阔,地形地貌多样化,地物变化速度快,因此对地物变化的检测及预测可为输电走廊的合理设置提供参考。目前,地物变化检测方法主要有植被变化追踪(vegetation change tracker,VCT)算法和多特征融合变化检测方法,如胡圣元等[1]基于VCT算法和时间序列Landsat 8 OLI数据,实现了对森林突发性变化和时间序列趋势变化的检测;徐俊峰等[2]基于多特征融合,借助高分辨率遥感影像飞机,实现了用飞机检测地物变化。上述检测方法虽可实现地物变化检测,但由于输电走廊容易受人类活动影响,且多特征融合变化检测方法难以检测微小的特征变化,故本文根据输电走廊特点,基于多时相点云数据,提出基于改进迭代最近点(iterative closest point,ICP)算法的三维地表变化检测策略,以提高输电走廊地物变化检测的准确率。
1 ICP算法改进
ICP算法是一种可快速精确处理二维、三维形状配准问题的算法,具有可靠性高、鲁棒性佳等特点。ICP算法的原理是基于点间距离最近和点面距离最近的原则,寻求不同点集的最佳空间匹配关系,以求解点集之间的空间旋转和平移关系[3]。采用ICP算法匹配两个时相点集的核心是利用最小二乘法,实现对三维相似变化的计算[4-5]。由于最小二乘法计算时不具备最优的估算特性,加之在数据处理过程中,数据的剔除处理会产生一定的误差,最终导致计算结果存在一定误差[6-7]。因此,为使基于多时相点云数据的输电走廊地物变化检测结果更为精确,基于稳健估计方式,对ICP算法进行改进,以抑制因为粗差导致的最终匹配结果误差。
理论上,M估计属于极大似然估计类的估值,其表达式为:
∑ρ(vi)=min
(1)
式中:vi为残差;ρ(vi)为代价函数。
本文中M估计用∑ρ(vi)替代传统最小二乘法中的残差平方和。因此,对式(1)求导,得:
(2)
式中:x为训练样本属性。

∑wiviai=0
(3)
通过上述变换,M估计则转化为选权迭代的最小二乘估计。同时,Huber权函数修正为:
(4)
式中:c为调节因子,一般取值为1.345。
每次迭代时,通过式(4)对权重进行修正,由此逐步减少传统M估计中粗差的权重,进而减少粗差对结果的影响。
2 基于改进ICP算法的输电走廊地物变化检测
2.1 不规则三角网构建
基于不规则三角网(triangulated irregular network,TIN)的三维建模是实现地表智能检测的基础,因此首先进行TIN的构建[8]。考虑到实际地形复杂,激光点云受间距限制,容易出现对地形表达失真的现象,本文采用可提高精细度的特征线对TIN进行约束,并在约束条件下进行TIN构建。为简化特征线在三角网中的处理方法,以密集点替代特征线,具体如图1所示。采用Delaunay三角网快速构建方法构建TIN[9],具体如图2所示。TIN构建步骤如下:

图1 基于密集点的特征线

图2 基于特征线的TIN构建
1)根据最大范围和最小范围分别构建一个三角形,并将插入点置于其中一个三角形内,按照Delaunay法则进行分裂,得到3个新三角形[9]。
2)调整三角网中每个三角形的邻边关系,并以原三角形某边为基础,将其中一个三角形作为新插入点,形成三角形顶点。
3)判断新插入点是否落入邻边三角形外接圆,若是则对这两个三角形进行重构。
2.2 检测流程
完成TIN构建后,基于改进ICP算法对输电走廊地物变化进行检测。具体流程为:
1)根据正向检测原则,依次设置前时相点云为检测点云,后时相点云为目标点云,并以检测点云为基准。
2)对连接线的航带平差计算,并基于特征属性的多层次滤波依次对检测点云、目标点云数据进行处理。
3)对全部点云数据进行分类,并对分类后的点云数据进行坡度熵抽稀,以此得到不同点云数据的抽稀率。
4)将检测点云、目标点云数据进行TIN数据结构设计,并进行抽稀后的地面点云数据构网差值计算,精细化计算结果。
5)根据计算结果进行输电走廊地物变化检测精度分析及评价。
3 试验验证
3.1 数据来源及处理
本文仿真实验选取河北省某市实验区域2015年8月和2019年8月机载激光雷达数据,并以2015年8月数据作为前向点云数据,2019年8月数据作为后向点云数据。考虑到获取的原始点云数据复杂、数据量大的问题,故对获取的数据依次进行连接线的航带平差计算、基于特征属性的多层次滤波、坡度墒的关键点抽稀处理。
3.1.1基于连接线的航带平差计算
基于连接线的航带平差计算方法为,以地表和建筑物表面为基础,首先定义连接线类型和属性,计算重叠航带内相同区域的连接线的航带平差,建立航带点云数据间偏移关系;然后根据分类策略对航带进行分类,生成连接线并采用最小二乘法计算系统偏移值;最后判断偏移值精度是否满足条件,若满足则输出结果。
3.1.2基于特征属性的多层次滤波
考虑到机载激光雷达数据具有高密度和离散型等特点,点云会表现出不同高程属性,因此可根据高程值大小判断地面点与非地面点。为准确区分地面点与非地面点,基于特征属性,采用多层次滤波对获取的点云数据进行预处理。
3.1.3基于坡度墒的关键点抽稀
自然界中,地形地貌十分复杂,通常存在一定坡度,这些坡度对输电走廊地物检测结果存在一定程度的影响。因此,为使检测结果与实际相符,基于地形坡度,提出采用坡度熵对地形进行描述。假设a为没有坡度的平坦地形,b为坡度变化规则的简单地形,c为坡度变化无任何规律的复杂地形,如图3所示。

图3 不同坡度的地表类型
定义坡度熵为H(s):
(5)
(6)
式中:si为第i个坡度面的坡度值;n为实际计算使用到的坡面数。H(s)值大,表示地形相对平缓;H(s)值小,表示地形变化剧烈。
由于获取的激光雷达点云数据量庞大,为提高运算效率,基于坡度熵对时相点云进行抽稀处理。具体抽稀方法如下:
1)读取TIN模型三角网中第一个顶点,并根据空间属性查找其相邻三角形。
2)根据网格划分原则,读取第一个网格中的第一个三角网数据,并根据拓扑关系和空间属性找到与第一个三角形邻边的三角形。
3)依次计算与中心顶点相邻的全部三角面坡度,并以块文件为基础,计算块中局部地形的坡度墒。
4)遍历所有数据块,计算坡度墒。
5)根据预设熵阈值,保留熵阈值内数据点,剔除熵阈值外数据点。
3.2 结果与分析
3.2.1数据处理结果
采用连接线的航带平差计算等方法对获取的原始点云数据进行处理,得到图4所示的预处理后的结果。
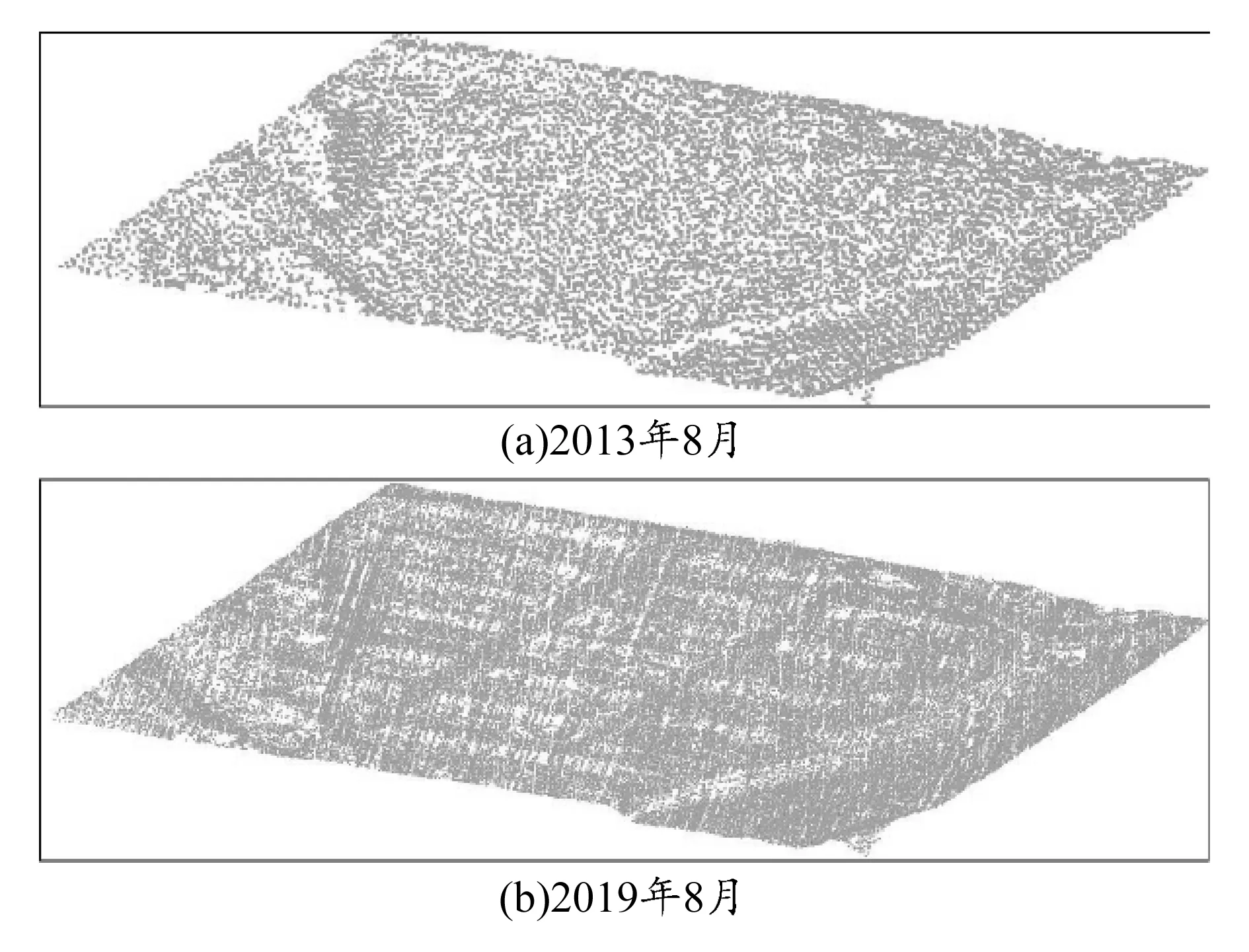
图4 基于坡度墒的关键点抽稀结果
3.2.2实例验证
采用布尔运算方法对以上多时相点云数据的输电走廊地物变化检测模型进行计算,得到如图5所示的A2区域变化结果。由图5可知,从2013年到2019年A2区域的输电走廊地物发生了较大的变化;相较于2013年地表,2019年地表测量区域明显存在下陷变化。
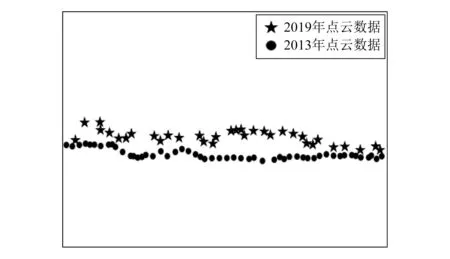
图5 A2区域不同时相点云分析
4 结束语
本文通过获取多时相点云数据,开展了输电走廊地物的检测,并提出一种适应性强、检测精度高的基于改进ICP算法的三维地表变化检测方法。该检测方法利用改进ICP算法对形变前后点云进行配准,精确检测输电走廊地物的变化情况。基于多时相点云数据的智能检测方法是未来城市智能变化检测的一个新方向,本文仅实现了输电走廊地物变化的检测,对基于多时相点云数据的特征自动检测及提取技术没有进行研究,未来将开展以上技术的研究工作,以更好实现地物检测。