死区输入下未知严格反馈非线性系统自适应约束控制*
2022-02-01宫赤坤汝青杨袁立鹏
宫赤坤, 汝青杨, 袁立鹏
(1. 上海理工大学 机械工程学院,上海 200093;2. 哈尔滨工业大学 机电工程学院,哈尔滨 150001)
引 言
现实世界中存在着很多未知系统,这些未知系统给控制器的设计带来了极大的困难.围绕这类系统,国内外众多学者研究出自适应[1-2]、神经网络[3-4]、模糊控制[5-7]等理论,并应用到了此类系统中.同时,工业系统中也广泛存在着非线性系统,非线性系统可划分为严格反馈、纯反馈、非严格反馈三种类型.其中,严格反馈系统是非常常见的系统,工业生产中存在许多严格反馈系统的模型,如液压伺服系统[8]、导弹系统[9]等.
实际生产过程中,由于执行机构物理结构的限制,存在控制输入的死区动态问题,如液压执行器、机械连接和交流电机驱动等系统[10].死区特性是一种典型的非线性现象,许多学者对此展开了研究.如文献[11]利用反步法与固定时间收敛解决了高阶非线性系统死区输入的控制问题,但反步法中存在微分爆炸问题.针对这一问题,文献[12]提出指令滤波反步自适应控制,解决了这一问题.
对于非线性系统中的不确定性和复杂的外界干扰,通常利用扩张状态观测器(extended state observer,ESO)观测其中无法直接获得的内部动态[13].ESO 是自抗扰控制技术(active disturbance rejection control,ADRC)中最关键的部分[14].目前,对于ESO 技术涌现出大量的研究成果.如文献[15]利用ESO 对伺服电动缸在外界干扰下进行补偿控制.文献[16]利用ESO 与有限时间控制方法相结合,使得严格反馈非线性系统跟踪误差收敛到平衡点的小区域内.上述研究成果因其使用的观测函数都是非光滑的,可能出现高频抖振的问题.文献[17]对ESO 中的非线性函数进行改进,保证了原点处不会发生过冲的现象,但其控制参数增多,造成了控制器设计的复杂性.
预设性能约束控制近些年已成为控制理论研究的热点问题,这种控制方法可以避免过大的超调对系统的损害,而且可以约束系统的收敛速度.具有预设约束的跟踪控制是采用规定的性能函数将原系统的跟踪误差转化为新的误差系统,并结合到控制器的设计中[18].现有的文献主要有两类方法,即漏斗控制和预设性能控制.漏斗控制是高增益的时变控制方法.目前为止,这种方法已被应用到了许多实际问题中.如文献[19]利用改进的漏斗函数与自适应神经网络对存在扰动的伺服机构进行补偿.文献[20]设计了漏斗快速非奇异终端滑模面控制器,解决了机械臂在外部干扰下的高精度跟踪控制问题.
基于以上讨论,针对文献[8-9]中需要对虚拟控制律的偏导数解析计算,文献[15-16]使用ESO 过程中出现的抖振问题,同时没有考虑到实际系统输出误差可能需要约束在一定范围内,文献[19-20]没有考虑到实际系统中可能存在死区输入造成控制系统性能恶化的问题,本文提出了基于免疫函数的自抗扰预设漏斗约束自适应控制策略.本文主要贡献如下:针对传统ESO 观测过程中出现的抖振问题,引入光滑的免疫函数设计观测器,从设计原理上消除了观测过程中出现的抖振现象;解决了实际系统中可能存在死区输入的问题,同时利用漏斗控制技术将输出误差约束在预设的范围内;使用双曲正切函数变化速率快这一特性设计了自适应控制律;控制器设计过程中使用指令滤波器,解决了反步法中微分爆炸的问题.
1 预备知识及问题描述
1.1 系统描述
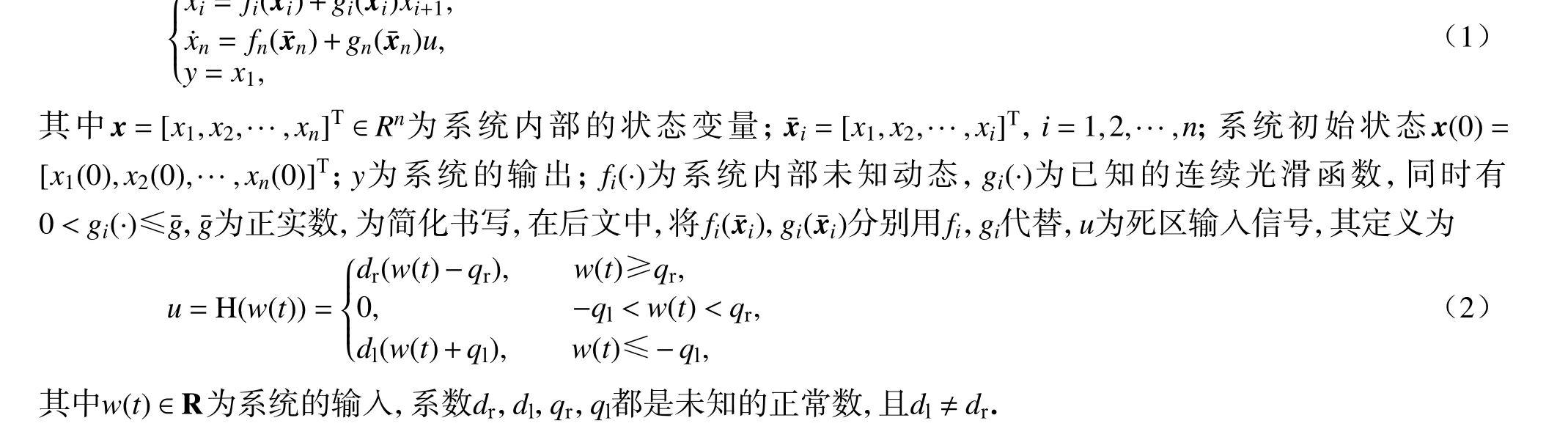
考虑死区高阶严格反馈非线性系统的跟踪控制问题,这里给出其系统的一般模型如下:
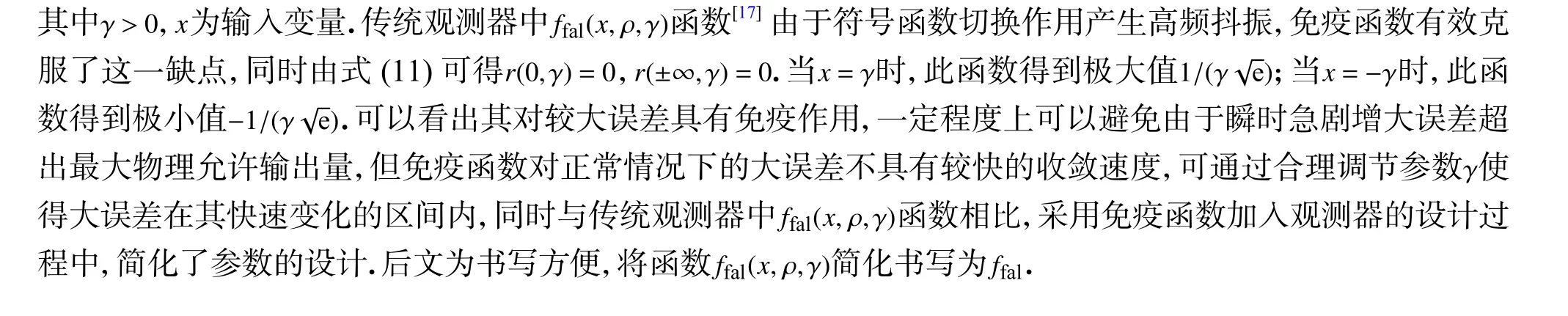
1.2 免疫函数
免疫函数定义如下[23]:

1.3 漏斗约束函数
漏斗控制不仅将误差维持在约束的范围内,同时也消除了超调这一现象.漏斗约束表达式如下:

其中N(·)是 时变增益,p(t)是 尺寸曲线,l(t)是 约束曲线,//e(t)//是 变量e(t)的欧式范数.本文中选用的漏斗函数[24]如下所示:

其中 β0, β∞和c为 正常数,满足条件 β0≥β∞>0.通过使用漏斗约束的控制方法,系统的输出误差可被约束在呈指数衰减的曲线范围内.
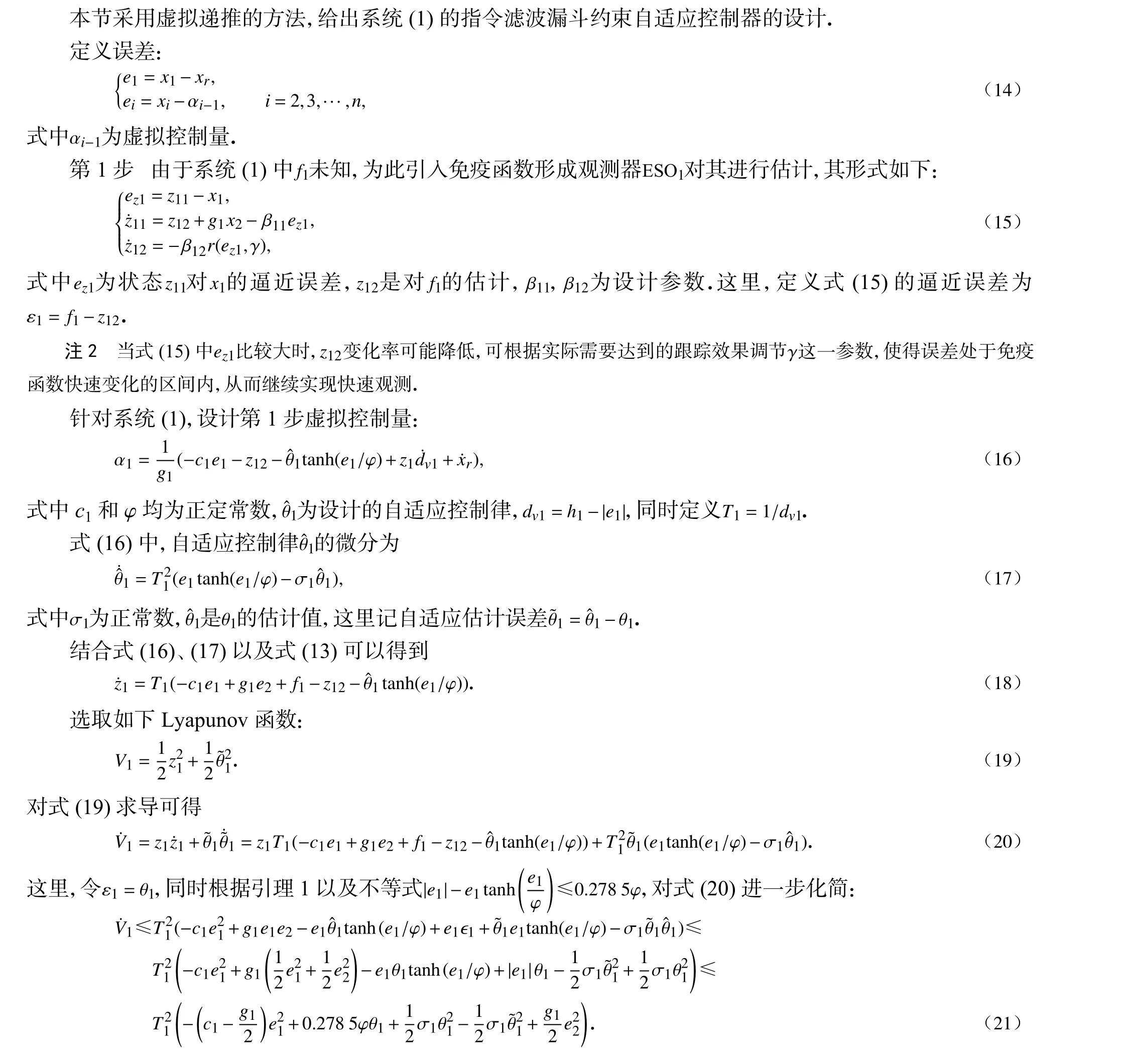
2 漏斗约束控制器的设计

选取Lyapunov 函数:

3 稳定性分析
我们在前文给出控制器设计的基础上,对整个系统的收敛性进行整体分析.
选取系统的Lyapunov 函数如下:
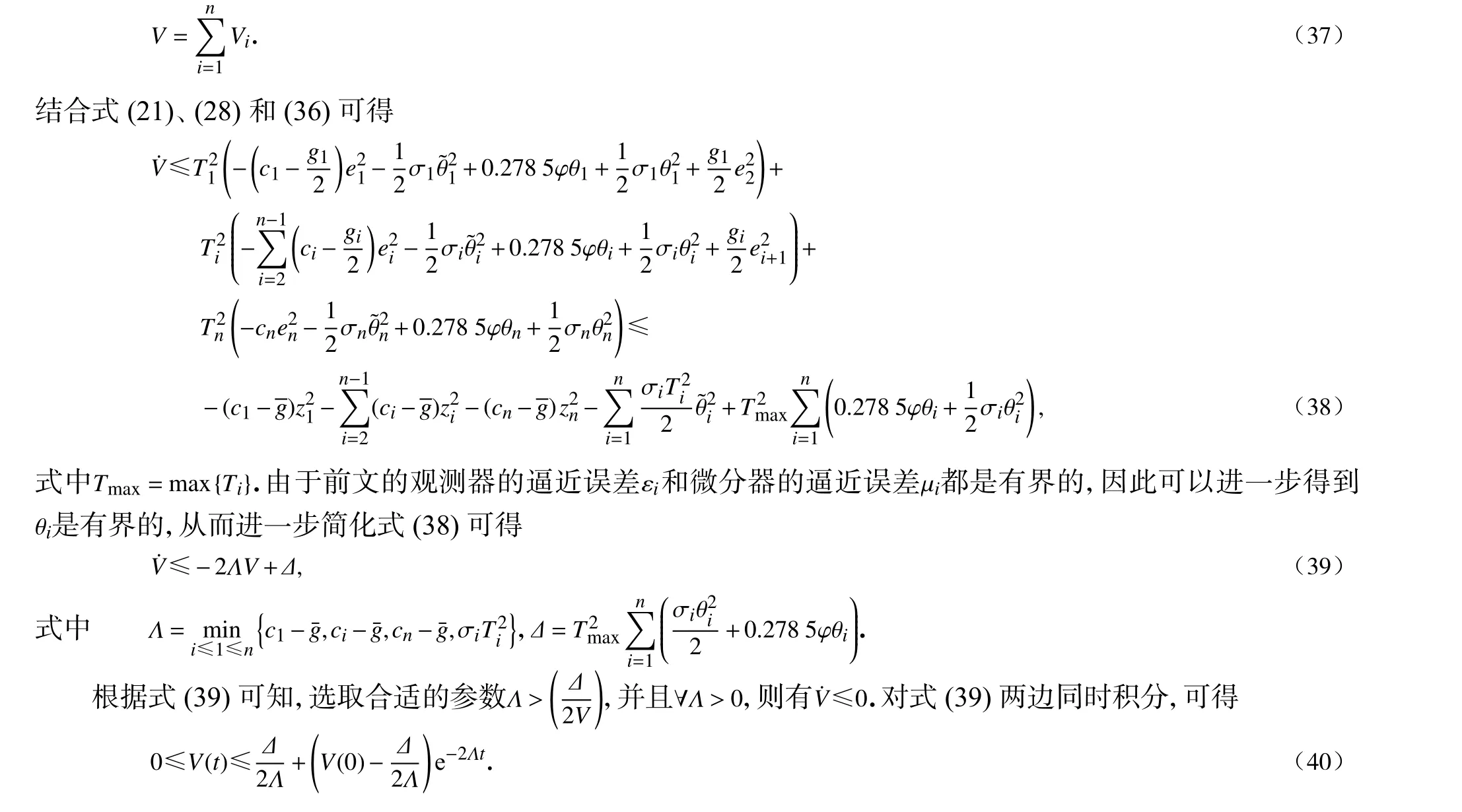
由式(40)可得闭环系统所有信号是最终有界的.
4 仿 真 算 例

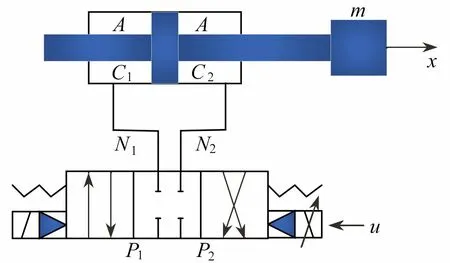
图1 阀控液压缸系统Fig. 1 The schematic diagram of the hydraulic servo system
选取状态变量x=[x1,x2,x3]T=[x,x˙,F/m]T,可得其状态方程模型为如下形式:

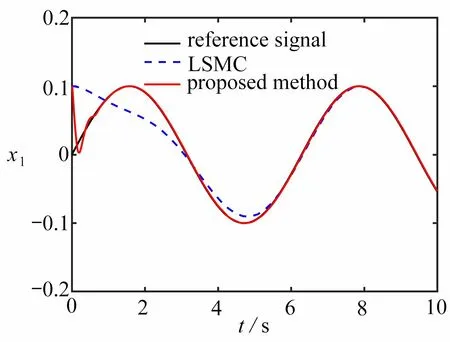
图2 跟踪曲线图Fig. 2 The tracking curve
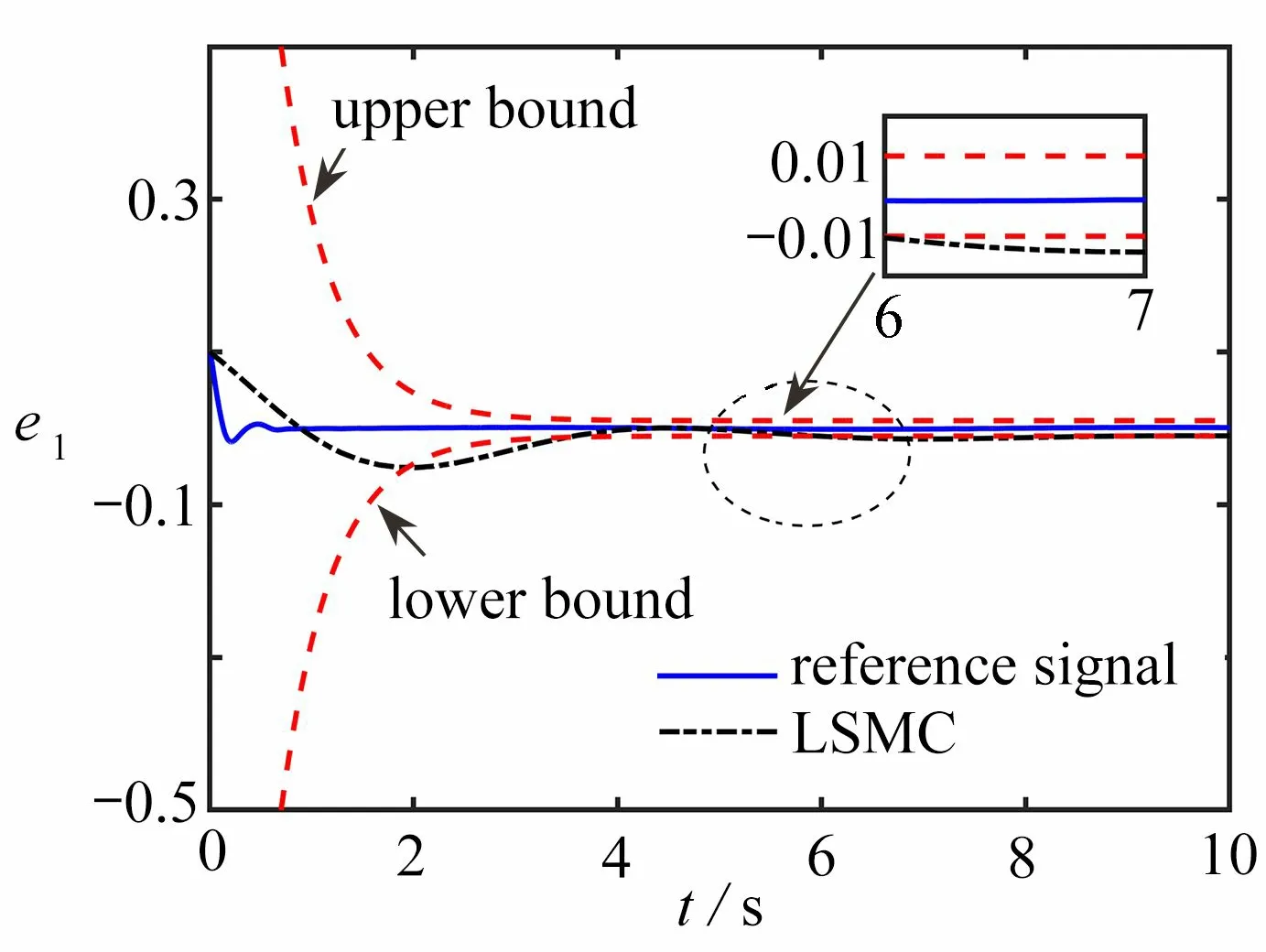
图3 输出误差曲线图Fig. 3 The error curve
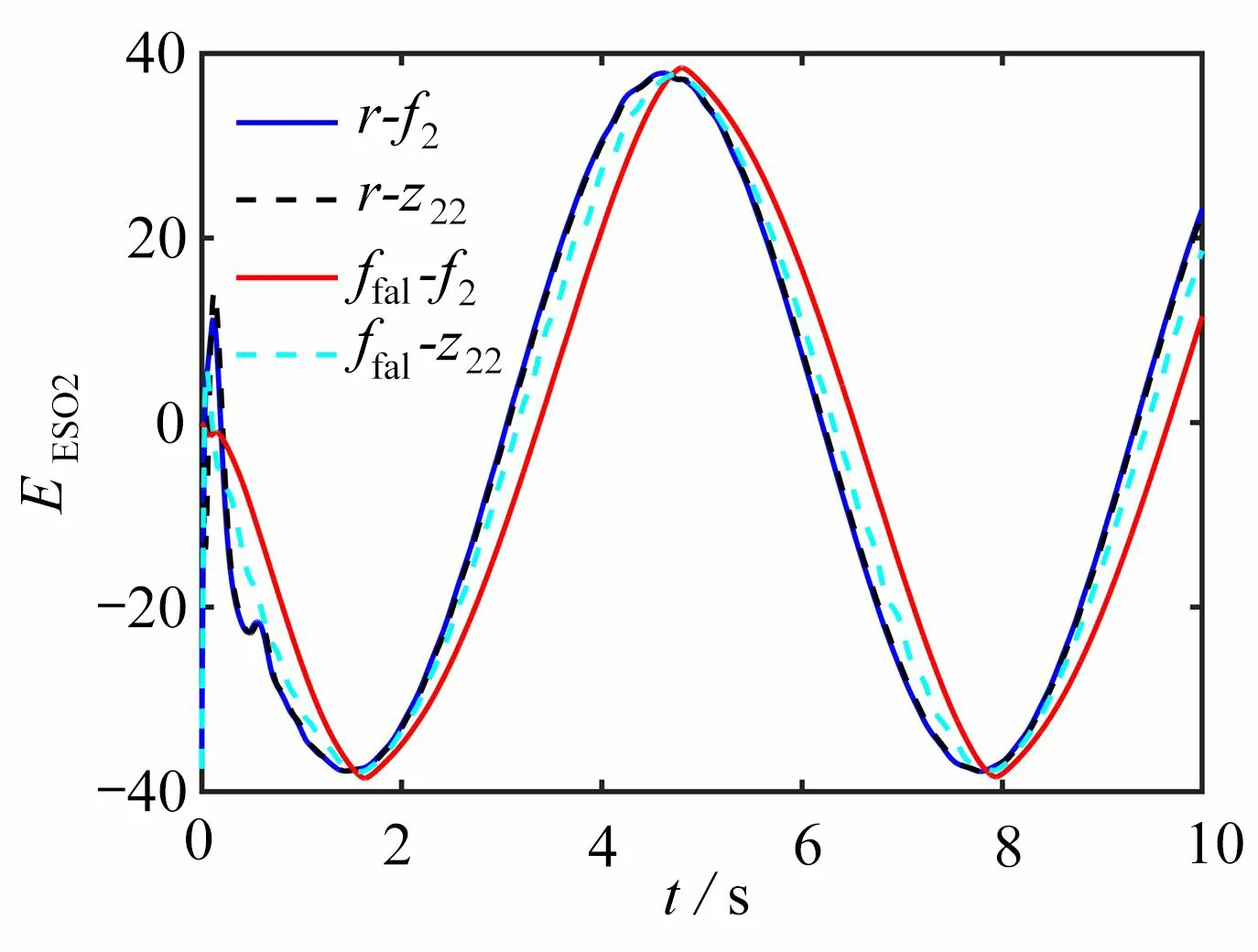
图4 f2 和z 22的曲线Fig. 4 Curves of f2 and z22
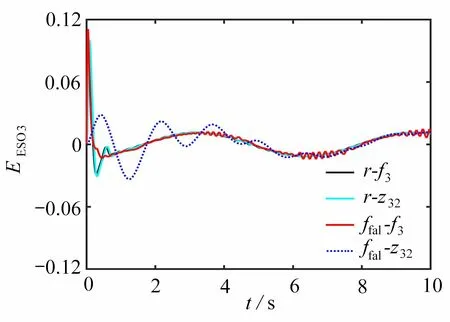
图5 f3和 z 32的曲线Fig. 5 Curves of f3 andz32
图2、3 表明,在系统(41)输出存在初始误差时,线性滑膜控制方法以及本文使用的免疫函数设计的控制器都能达到跟踪的效果.但通过比较可以看出,本文所设计的控制器能够在1 s 内实现系统输出稳定跟踪预设信号,并且最终输出跟踪误差可以收敛在设定的小区间( −0.01,0.01)内.从表1 中可以看出,本文控制方法误差波动区间范围更小,可以获得更小的稳态误差.图4、5 展示出基于免疫函数的观测器与基于ffal函数的观测器各自的观测效果.从图4、5 可以看出,基于免疫函数的观测器收敛速度更快,观测效果更好,并且基于免疫函数的观测器在瞬态阶段出现超调是由于此观测器瞬态收敛所导致,可以通过调节参数进行改进.

表1 两种不同控制器的误差分析Table 1 Error analysis for the control effects of 2 different controllers
为进一步体现本文所设计控制器的抗干扰性,在本文设计的输入信号中加入扰动0 .2randn(1,1),从而对本文控制系统的抗扰性能进行仿真研究,仿真结果如图6、7 所示.图6、7 中加入噪声作为扰动信号的控制效果与图2、3 中不加入噪声的控制效果基本上是相同的,表明本文的控制器设计具有良好的抗外界干扰的能力,具有较强的鲁棒性.

图6 加入噪声扰动跟踪曲线图Fig. 6 The tracking curve with noise
5 结 论
本文研究了一类具有死区输入的预设约束未知高阶严格反馈非线性系统的控制问题,利用光滑免疫函数设计观测器,解决了系统中未知项无法直接获取的问题,同时解决了观测过程中的抖振问题.通过将漏斗控制技术、双曲正切函数和自适应控制相结合,提出了一种新颖的自适应状态反馈控制策略;引入指令滤波器处理反步法中微分爆炸问题.本文所提出的控制策略可以有效地跟踪期望轨迹,而且误差维持在预设的漏斗约束内,最后将本文的控制方法应用到液压伺服驱动系统中,通过仿真结果证明了所设计控制器的有效性.但本文设计的控制器理论上达到最终的控制效果没有时间约束要求,可进一步改进控制器使得其在固定时间内达到控制要求.
参考文献( References ) :
[1]SHE X, LIU J, ALCAIDE A M, et al.Adaptive second-order sliding mode control for grid-connected NPC converters with enhanced disturbance rejection[J].IEEE Transactions on Power Electronics, 2022, 37(1): 206-220.
[2]ZHOU Q, DU P, LI H, et al. Adaptive fixed-time control of error-constrained pure-feedback interconnected nonlinear systems[J].IEEE Transactions on Systems Man Cybernetics-Systems, 2021, 51(10): 6369-6380.
[3] 刘祥, 童东兵, 陈巧玉. 基于观测器的非严格反馈时滞非线性系统的神经网络自适应控制[J]. 应用数学和力学, 2021,42(6): 586-594. (LIU Xiang, TONG Dongbing, CHEN Qiaoyu. Observer-based adaptive neural network control for nonstrict-feedback nonlinear systems with time delays[J].Applied Mathematics and Mechanics, 2021, 42(6):586-594.(in Chinese))
[4]WANG T, GAO H, QIU J. A combined adaptive neural network and nonlinear model predictive control for multirate networked industrial process control[J].IEEE Transactions on Neural Networks and Learning Systems,2016, 27(2): 416-425.
[5]TRUONG N, PHAM D H, VAN ANH H, et al. Fuzzy-based distributed behavioral control with wall-following strategy for swarm navigation in arbitrary-shaped environments[J].IEEE Access, 2021, 9: 139176-139185.
[6]AYMEN F, MOHAMED N, CHAYMA S, et al. An improved direct torque control topology of a double stator machine using the fuzzy logic controller[J].IEEE Access, 2021, 9: 126400-126413.
[7]WANG Z, ZOU L, SU X, et al. Hybrid force/position control in workspace of robotic manipulator in uncertain environments based on adaptive fuzzy control[J].Robotics and Autonomous Systems,2021, 145: 103870.
[8]GUAN C, PAN S. Nonlinear adaptive robust control of single-rod electro-hydraulic actuator with unknown nonlinear parameters[J].IEEE Transactions on Control Systems Technology, 2008, 16(3): 434-445.
[9]LI Z, ZHANG R. Time-varying sliding mode control of missile based on suboptimal method[J].Journal of Systems Engineering and Electronics, 2021, 32(3): 700-710.
[10]YU J, SHI P, DONG W, et al. Adaptive fuzzy control of nonlinear systems with unknown dead zones based on command filtering[J].IEEE Transactions on Fuzzy Systems, 2018, 26(1): 46-55.
[11]LI H, HUA C, LI K. Fixed-time stabilization for interconnected high-order nonlinear systems with dead-zone input and output constraint[J].Journal of the Franklin Institute, 2021, 358(14): 6923-6940.
[12]DONG W, FARRELL J A, POLYCARPOU M M, et al. Command filtered adaptive backstepping[J].IEEE Transactions on Control Systems Technology, 2012, 20(3): 566-580.
[13]XIA Y, ZHU Z, FU M. Back-stepping sliding mode control for missile systems based on an extended state observer[J].IET Control Theory and Applications, 2011, 5(1): 93-102.
[14]TALOLE S E, KOLHE J P, PHADKE S B. Extended-state-observer-based control of flexible-joint system with experimental validation[J].IEEE Transactions on Industrial Electronics, 2010, 57(4): 1411-1419.
[15] 郑怀航, 王军政, 刘冬琛, 等. 融合前馈与姿态预测的并联稳定平台自抗扰控制策略[J]. 机械工程学报, 2021, 57(9):19-27. (ZHENG Huaihang, WANG Junzheng, LIU Dongchen, et al. Active disturbance rejection control strategy of parallel stable platform based on feedforward and attitude prediction[J].Journal of Mechanical Engineering,2021, 57(9): 19-27.(in Chinese))
[16] 张立鹏, 李小华, 何志江. 严格反馈非线性系统基于事件触发的自抗扰预设有限时间跟踪控制[J]. 信息与控制, 2021,50(4): 441-448, 458. (ZHENG Lipeng, LI Xiaohua, HE Zhijiang. Event-triggered preassigned finite-time tracking control with active disturbance rejection for a class of strict feedback nonlinear systems[J].Information and Control, 2021, 50(4): 441-448, 458.(in Chinese))
[17] 蒲明, 刘鹏, 熊皑. Fal函数的改进及3种新型非线性扩张状态观测器[J]. 控制与决策, 2021, 36(7): 1655-1662. (PU Ming, LIU Peng, XIONG Ai. Advanced Fal function and three novel nonlinear extended state observers[J].Control and Decision, 2021, 36(7): 1655-1662.(in Chinese))
[18]CHENG Y, REN X, ZHENG D, et al. Non-linear bandwidth extended-state-observer based non-smooth funnel control for motor-drive servo systems[J].IEEE Transactions on Industrial Electronics, 2022, 69(6): 6215-6224.
[19]WANG S, YU H, YU J, et al. Adaptive neural funnel control for nonlinear two-inertia servo mechanisms with backlash[J].IEEE Access, 2019, 7: 33338-33345.
[20]WANG H, FANG L, HU M, et al. Adaptive funnel fast nonsingular terminal sliding mode control for robotic manipulators with dynamic uncertainties[J].Journal of Mechanical Engineering Science, 2021, 235(18): 3678-3693.
[21]LI H, ZHAO S, HE W, et al. Adaptive finite-time tracking control of full state constrained nonlinear systems with dead-zone[J].Automatica, 2019, 100: 99-107.
[22]MA M, WANG T, GUO R, et al. Neural network-based tracking control of autonomous marine vehicles with unknown actuator dead-zone[J].International Journal of Robust and Nonlinear Control, 2022, 32(5): 2969-2982.
[23] 曾喆昭, 吴亮东, 陈韦名. 基于ESO的一类线性时变系统自学习滑模控制方法[J]. 控制与决策, 2016, 31(11): 2101-2105. (ZENG Zhezhao, WU Liangdong, CHEN Weiming. Self-learning sliding mode control method of a class of linear time-varying systems based on ESO[J].Control and Decision, 2016, 31(11): 2101-2105.(in Chinese))
[24]ZHANG J, YANG G. Prescribed performance fault-tolerant control of uncertain nonlinear systems with unknown control directions[J].IEEE Transactions on Automatic Control, 2017, 62(12): 6529-6535.
[25]NA J, LI Y P, HUANG Y B, et al. Output feedback control of uncertain hydraulic servo systems[J].IEEE Transactions on Industrial Electronics, 2020, 67(1): 490-500.
