独立光伏系统中基于参数估计的双积分滑模变结构MPPT算法研究
2022-01-28李春菊
李 春 菊
(宁夏工商职业技术学院 宁夏 银川 750021)
0 引 言
近年来,随着空气质量的恶化,工业发展对可燃烧能源的需求增加,人们急需找到一种新的可再生清洁能源。太阳能发电具有清洁、可再生等诸多优点,越来越受到人们的关注,但是目前光伏发电能量转换效率低、太阳能板价格高昂等因素,大规模发展光伏发电系统还存在诸多局限。太阳能板输出功率随光照强度和环境温度变化而变化。为了提高光伏系统能量转换效率,太阳能板必须实时工作在最大功率输出点,保证对外提供最大功率,因此需要对太阳能板最大功率点进行跟踪。在光伏发电系统中,最大功率跟踪起着非常重要的作用。
本文目标是设计一个优化的最大功率跟踪算法实现独立光伏系统最大功率跟踪。目前较常用的算法有扰动观察法、电导增量法、滑模变结构控制算法等。扰动观察法是一种迭代算法,在实际应用过程中实现简单,但是抗干扰能力差[1];电导增量法需要复杂的电路[2];基于滑模变结构的算法实现更复杂,而且存在震荡过程,在功率跟踪过程中消耗大量的太阳能[3]。
本文首先利用粒子群算法计算出太阳能板等效电路参数,由计算得出的电路参数建立独立光伏系统模型[4]。其次在研究滑模变结构的基础上,利用赫尔维茨稳定性选择滑模面系数。把最大输出功率时的电压与实际输出电压的差值作为参考面,其一阶导数和二阶导数在最大功率输出点均为零[5]。利用双积分滑模变结构跟踪独立光伏系统的最大功率点。仿真结果表明,该方法取得了非常好的效果。
1 独立光伏系统模型
独立光伏系统模型包括光伏电池、直流转换模块和蓄电池。直流转换模块是连接光伏电池与蓄电池或者负载的电路。最大功率跟踪算法通过改变直流转换模块的元器件参数来调整电路通断时间,以达到调整输出的目的。
1.1 光伏电池模型
光伏电池是一个非线性器件。其等效电路是由一个电流源并联一个二极管和一个分流电阻Rsh,再串联一个电阻Rse,如图1所示[6]。其中:iD表示流过并联二极管的正向电流;vD表示并联二极管两端的电压;ish表示流过分流电阻Rsh的电流。

图1 太阳能板等效电路
根据图1,光伏电池等效电路的伏安特性如式(1)所示。
(1)
式中:Io是二极管反向饱和电流;vpv、ipv、ISCR、Ki、q、K、a、Tr、T、G、Rse、Rsh分别是光伏电池的输出电压、输出电流、短路电流、短路电流温度系数、电荷常数、Boltzmann常数、PN节理想因子、参考温度、光伏板温度、太阳照射度、等效串联电阻、等效并联电阻[7]。a、Rse、Rsh决定了模型的正确性和精确度。因此本文利用粒子群算法来估计以上参数[8]。
1.2 光伏电池模型参数估计
光伏电池模型等效电路在短路状态时的电流为:
(2)
式中:IPV为等效电流源输出电流;Np为并联的光伏电池数量;Ns为串联的光伏板数量。
处于开路状态时,等效电路的输出电压为:
(3)
当电路处于最大功率输出时其功率为:

(4)
式中:Vmp(T)、Imp(T)分别为在电路处于最大功率输出点时的输出电压和输出电流。
以上是电路三种状态时的特性。通过以上公式,PSO可以确定理想因子a、等效电路串联电阻Rse和并联电阻Rsh[9]。
同时光照强度G和环境温度T均会影响IPV的大小。具体数学关系如下:
(5)
式中:IPV,STC是光伏系统在标准测试光照强度GSTC下的电流;KISCR是短路电流温度系数;ΔT=T-TSTC是与标准测试环境的温度差。
在特定温度下,短路电流、开路电压、最大功率分别为:
ISCR,e(T)=ISCR,STC+KISCRΔT
(6)
Voc,e(T)=Voc,STC+KVocΔT
(7)
Pmp,e(T)=Pmp,STC+KPmpΔT
(8)
式中:ISCR,STC、Voc,STC、Pmp,STC分别为在标准测试条件下的短路电流、开路电压、最大功率点的功率峰值;KVoc、KPmp分别为开路电压和最大功率的温度系数。
本文首要目标是确定图1中单二极管光伏电池模型参数。因此目标函数定义为[10]:
(9)
其中:
(10)
(11)
(12)
确保目标函数中每一项处于同一范围内。
实际电路中,电阻值肯定大于零,因此为了缩小计算范围,简化计算过程,各参数有如下约束条件:
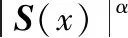
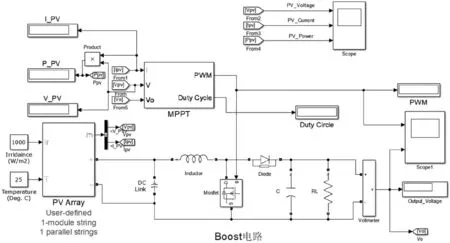
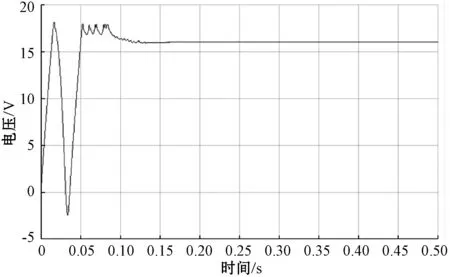
amin Rse,min Rsh,min (13) 当计算的结果处于约束边界,这些结果对于实际电路来说没有实际意义。 fα=μ[βafα,a+βRsefα,Rse+βRshfα,Rsh]= (14) 式中:βa、βRse、βRsh是权重值,这些值确保了函数结果处于同一范围内。 (15) 式中:x=a、Rse或Rsh。 μ是全局权重系数。通过参考文献[5],带有约束条件的目标函数如下: fobj=|fISCR+fVoc+fPmp+fa| (16) 式(16)把问题转换为非约束性问题。 在算法中,用到以下参数:① 种群数量N为70;② 最大的评估代数为1 000;③ 粒子成员为a、Rse、Rsh;④ 惯性权重ωmax=0.9、ωmin=0.4;⑤ 加速度常数c1=2、c2=2;⑥ 限制性参数μ=0.2。 通过运行粒子群优化算法得到如下结果:理想因子a=1.32;串联电阻Rse=0.4 Ω;并联电阻Rsh=187.32 Ω。 直流转换模块用来连接光伏电池与后端负载。电力电子变换器中,Boost电路是一种较为常用的形式,其特点是输出电压比输入电压高,是一种升压斩波电路。该电路凭借开关管的通断时间来实现电压变换大小[11]。直流转换模块如图2所示。 图2 Boost电路 图2中,光伏电池为变换器的输入,C1为光伏电池两端的电容,C2为输出负载两端的电容,Gmo为开关器件,对于独立光伏系统,输出端使用蓄电池进行储能。当Gmo闭合时,电感进行储能。当Gmo断开时,光伏电池电压加电感电压高于后端蓄电池电压,给蓄电池充电,完成升压过程[5]。 MPPT控制算法通过控制Gmo的通断时间来控制后端输出的电压。调制周期为t,在一个周期内,ton为开关闭合时间,toff为开关断开时间。t=ton+toff。假设iL为电感电流、Io为负载电流、Vo为蓄电池端电压[6]、φ为开关管导通与关断信号PWM占空比的值,则该系统的数学模型可以表示为: (17) 非线性系统的一般表示形式为: (18) 则针对上述系统可取: 以光伏电池为研究对象,输出功率为: Ppv=vpvipv (19) 由光伏电池模型可知,光伏电池运行在最大功率点应满足[12]: (20) (21) 双积分滑模控制器是一种较新的滑模控制算法。常用的MPPT算法在使用时,当外界温度或者光照条件发生变化时,会导致系统工作不稳定,系统能量转换效率会下降。为了使光伏系统稳定工作,在系统控制环路增加滑模控制器,与传统的MPPT控制算法结合使用,达到跟踪最大功率的目的,同时又能稳定工作。 双积分滑模控制器采用输入误差的方式来调整控制,通过传统控制方法得到最大功率点处的电压值,将该电压与光伏电池的输出电压进行对比,把两者的误差e作为滑模变结构的输入,最大功率点满足条件e=0。根据滑模控制理论,可以取切换面为: S(x)=e(x) (22) 在控制器设计时,跟踪误差e(x)为: e(x)=e1(x)+e2(x)+e3(x) 其中: (23) 式中:Vref为通过传统方法得到的光伏系统最大功率点的电压值。 同时,等效控制量αeq的存在,确保了滑动面切换函数S(x)=0的可行性[12]。 求解如下方程,计算等效控制量αeq: (24) 根据式(18)得到: (25) (26) 进一步得出: (27) 其中: (28) (29) (30) 依据上述算法原理建立太阳能独立发电系统仿真模型。本实验中设定环境温度为25 ℃。光照度为1 000 W/m2。仿真时长为1 s,仿真算法为ode45。 如图3-图7所示,在独立光伏系统仿真实验中,对滑模控制算法和基于模型参数估计的双积分滑模控制算法所取得的结果进行对比。滑模控制算法输出的电压在最初时段有较大的震荡,同时功率也有较大的震荡,导致电路达到平稳工作状态需要较长时间,消耗更多的能量。而基于模型参数估计的双积分滑模控制算法中,功率能够快速到达其稳定状态,到达稳定状态后波动很小,电压输出更加趋近于期望值。 图3 光伏发电系统仿真模型 图4 滑模控制输出电压曲线 图5 双积分滑模控制输出电压曲线 图6 滑模控制功率特性曲线 图7 双积分滑模控制功率特性曲线 本文首先利用PSO对电路模型参数进行估计,使仿真模型参数更加接近现实环境,使仿真结果更加合理和真实。然后提出基于参数估计的双积分滑模变结构算法对独立光伏发电系统进行最大功率跟踪,利用参考电压与光伏电池输出电压之间的误差作为滑模变结构的输入,控制开关管的通断时间,调整跟踪步长,达到了跟踪最大功率点电压的目的。仿真实验结果表明,本文算法在跟踪最大功率点处的电压具有很强的稳定性、快速性和鲁棒性。1.3 直流转换模块及负载模型


2 双积分滑模变结构控制器设计


3 实验仿真与结果分析



4 结 语
