山西陆态网络坐标时间序列噪声及速度场分析
2022-01-27隋哲民李建章王思凡高志钰
隋哲民 李建章 王思凡 高志钰
1 兰州交通大学测绘与地理信息学院,兰州市安宁西路88号,7300702 地理国情监测技术应用国家地方联合工程研究中心,兰州市安宁西路88号,730070 3 甘肃省地理国情监测工程实验室,兰州市安宁西路88号,7300704 中国地震局地质研究所地震动力学国家重点实验室,北京市华严里甲1号,100029
中国大陆构造环境监测网络(简称陆态网络,crustal movement observation network of China,CMONOC)的连续运行参考站(continuously operating reference stations, CORS)目前已积累了数量庞大且连续的观测资料,通过分析这些数据可以得到相应地区的速度场,进而为地壳运动形变规律研究及地震分析预报等提供数据基础[1]。山西省陆态网络初步建成于2009年,共有10个连续观测站,其中SXCZ站由于滑坡被搬迁重建并更名为SXCH站。曾波等[2]利用2009~2011年的数据初步确定了山西省陆态网络的速度场;刘瑞春等[3]通过分析2010~2014年山西断陷带陆态网络的时间序列数据,并结合GPS基线结果,从整体上研究了山西断陷带南北2个区域的变形特征;成诚等[4]采用GAMIT/GLOBK软件计算时间序列,得到山西省GNSS基准站在水平方向呈东偏南向运动,垂直方向呈周期运动的结论。但由于山西地区陆态网络建立的时间较晚,上述研究使用的数据积累时长均不超过5 a,且未对有色噪声进行分析研究。若忽视坐标时间序列数据中存在的噪声,将无法有效分离有色噪声与观测数据,进而对速度场的解算产生很大影响。管雅慧等[5]的研究结果也证实,要想获得较为可靠且稳定的坐标时间序列最优噪声模型,至少需积累5 a以上的观测数据。
为此,本文选取山西地区10个陆态网络连续站2010-11~2021-01近 10 a的观测数据进行研究,确定N、E、U分量的最优噪声模型类型,进而得到山西地区经最优噪声模型改正后基于国际地球参考框架(international terrestrial reference frame, ITRF)下的速度场,为山西地区高精度坐标框架的研究提供支撑,也为板块运动、地壳形变监测研究及山西矿区生产建设等提供重要的参考资料。
1 噪声分析方法
目前,测绘工作者大多采用CATS软件来分析坐标时间序列的噪声,该软件解算时间序列时采用的算法及相应的模型都较为准确,但在处理较大量的数据时,解算速度十分缓慢,无法给实际工作提供便利[6]。为此,本文使用Hector时间序列分析软件,该软件使用贝叶斯数值分析法(Bayesian information criterion,BIC)[7],数据处理速率得到大幅提高。
2 时间序列获取
山西省CMONOC测站具体分布如图1所示。本文以GAMIT/GLOBK软件[8]解算得到的基于ITRF2014框架下的山西地区10个陆态网络连续站近10 a的原始坐标时间序列数据为基础,具体数据解算流程可参考文献[9]。
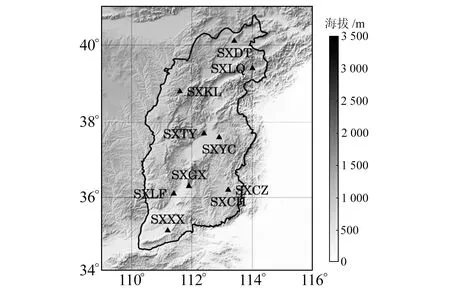
图1 山西境内CMONOC测站分布Fig.1 Distribution of CMONOC stations in Shanxi
由于同一测站在不同长度的时段内求得的最优噪声模型和速度场差别较大,在研究分析测站最优噪声模型和速度场前需要指定时间序列的时段长度[10]。本文数据来源于中国地震局GNSS数据产品服务平台(http:∥www.cgps.ac.cn.),所选测站对应的时间段如表1所示。
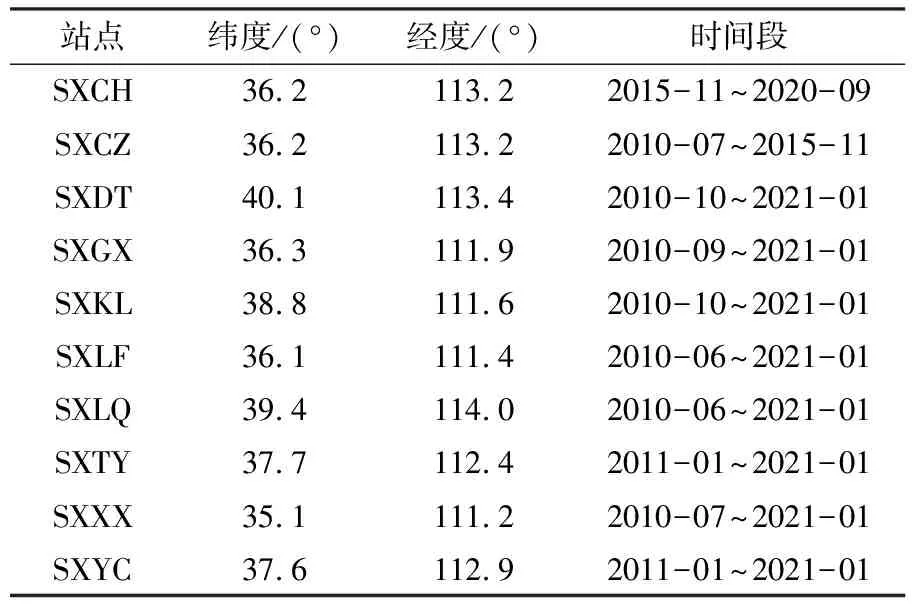
表1 山西省CMONOC站点概况
通常使用加权均方根误差(WRMS)来评价GNSS坐标时间序列的精度,WRMS值越小,表明对应数据的重复性越佳[11]。其中,水平方向上的WRMS理想值为1~2 mm,垂直方向上的WRMS理想值为3~10 mm。山西省陆态网络连续站坐标时间序列在N、E、U方向上的WRMS值统计结果如表2(单位mm)所示,可以看出,SXCZ、SXGX、SXTY站在N方向上的WRMS值大于理想值,SXCZ、SXTY站在E方向上的WRMS值大于理想值,其余各站在水平方向和垂直方向上的重复性均相对较好。

表2 山西省连续站坐标时间序列各分量WRMS值
以SXDT站为例,图2为该站的原始坐标时间序列。可以看出,N、E方向的观测数据具有明显的线性变化趋势,N方向随时间递增且斜率较小,E方向随时间递增且斜率较大;U方向的变化趋势存在一定的周期性,且以1 a周期最为显著;原始坐标时间序列观测数据中存在明显的奇异值(或称为外野值),必须在数据处理前进行剔除。
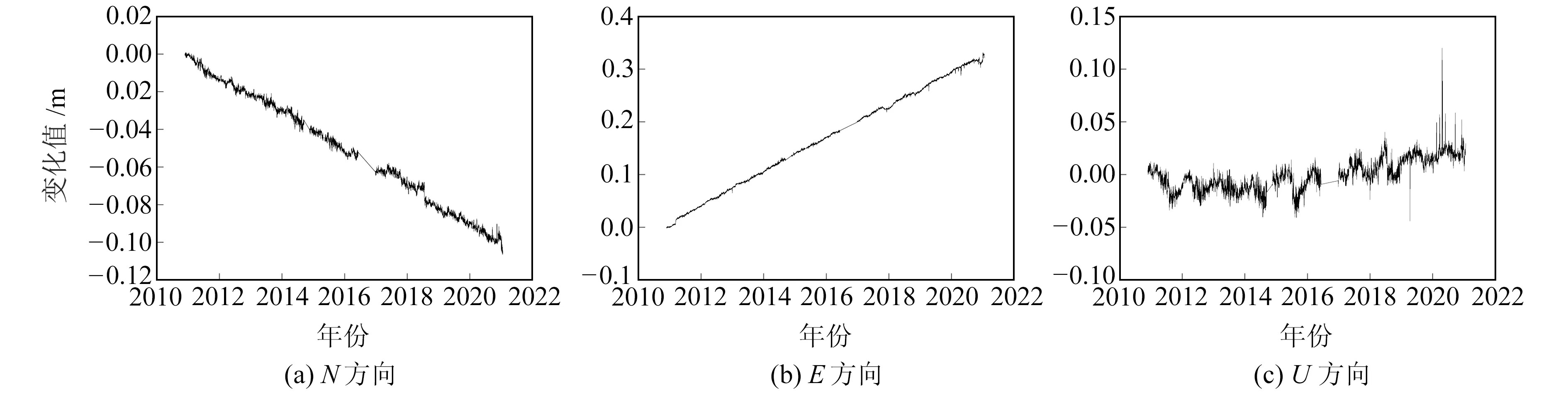
图2 SXDT站原始坐标时间序列Fig.2 Original coordinate time series of SXDT station
2.1 残差时间序列获取
Hector软件剔除时间序列奇异值的具体步骤为:1)基于最小二乘法获取残差时间序列;2)基于残差时间序列,利用四分位距探测原始数据包含的粗差,并剔除其中的奇异值;3)重新拟合新获取的残差时间序列并重复步骤2),直至粗差被完全剔除[7]。图3为SXDT站坐标残差时间序列。
图3 SXDT站坐标残差时间序列Fig.3 Coordinate residual time series of SXDT station
2.2 噪声模型分析
使用Hector软件对10个连续站3个方向分量的观测数据进行解算,分别使用4种模型计算每个测站对应N、E、U方向的BIC值,然后在同一分量中找到每个测站对应的最小BIC值,进而得出不同方向上的最优噪声模型。全部测站各方向上的噪声模型分布如图4所示。
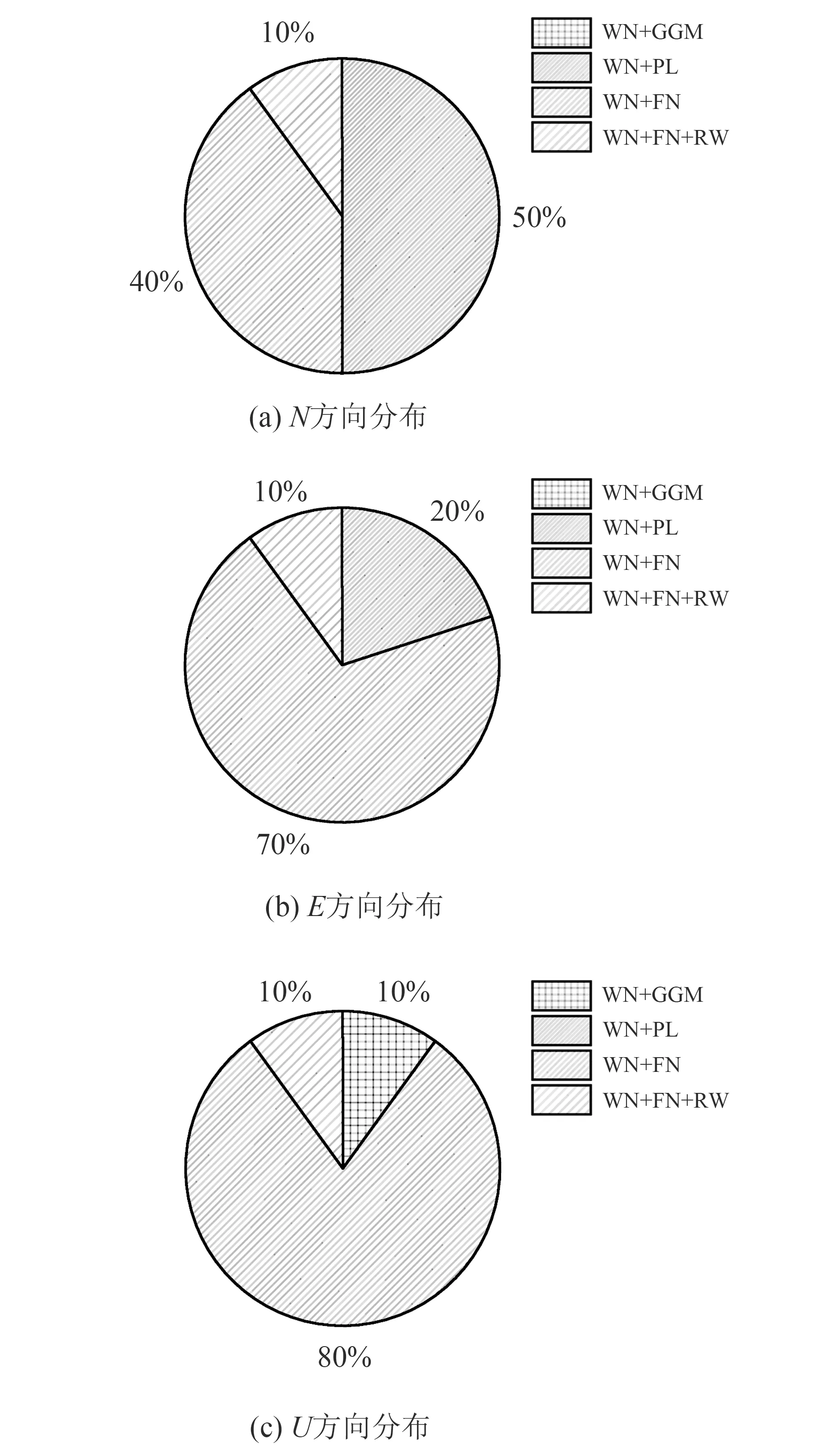
图4 各方向噪声模型分布Fig.4 Noise model distribution in eachdirection
由图4可知,N方向、E方向和U方向具有不同的噪声特性:在N方向上,最优噪声模型为WN+PL;在E和U方向上,最优噪声模型为WN+FN。
3 顾及有色噪声的山西速度场估计
绘制经最优噪声模型改正后ITRF2014框架下的山西省CMONOC基准站水平方向运动速度场,结果如图5所示。可以看出,修正后山西陆态网络基准站水平方向的运动速率平均为33.542 mm/a,运动方向为SEE 26°22′12″。
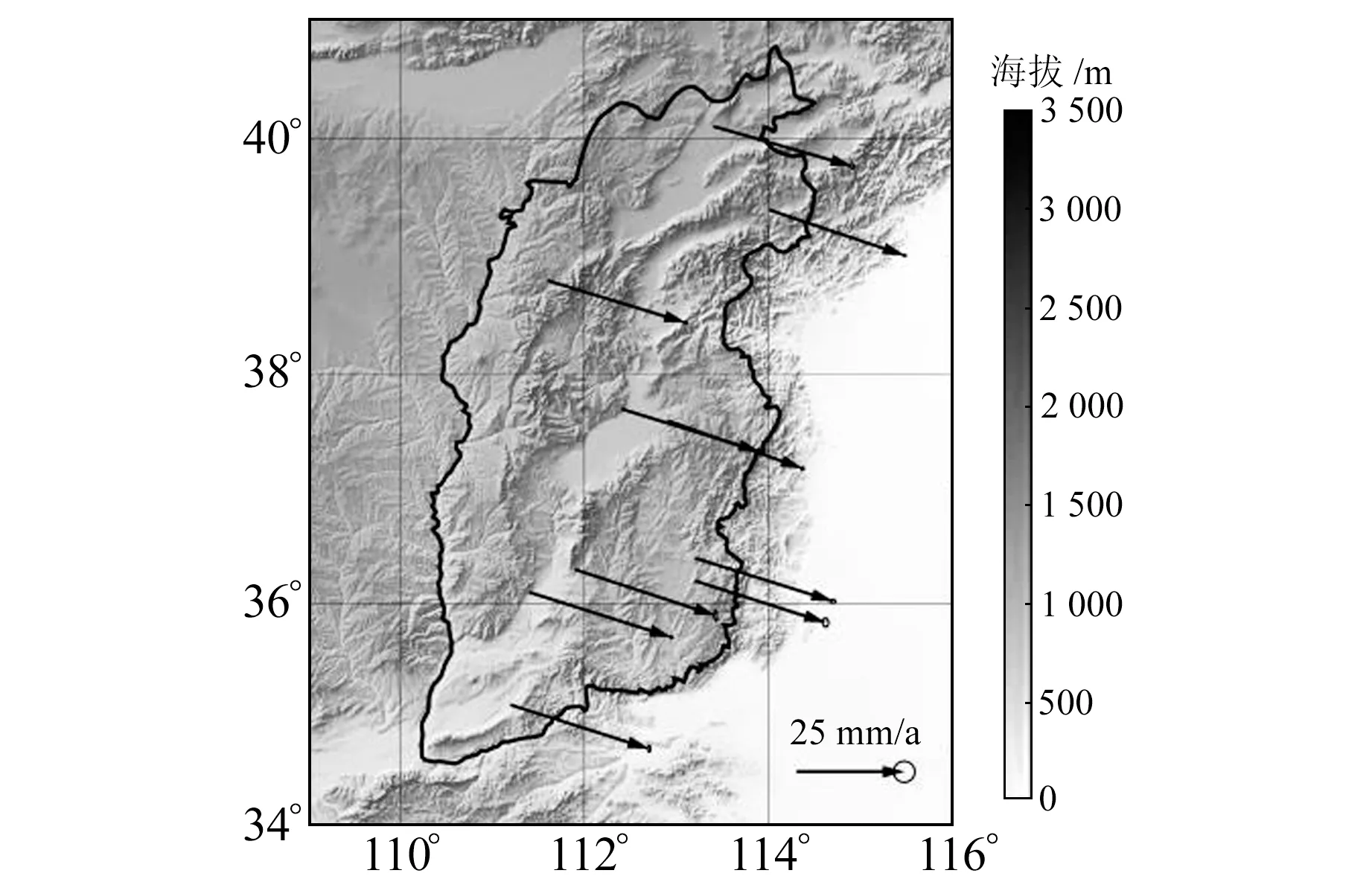
图5 修正后的水平方向速度场Fig.5 Corrected horizontal velocity field
表3给出修正后ITRF2014框架下的山西省CMONOC基准站水平方向速度估值和不确定度统计结果。由表可知,E方向速度标准差为0.751 mm/a,N方向速度标准差为0.552 mm/a,修正后山西省CMONOC基准站水平方向的速度精度较高,且整体精度优于未经修正的原始速度场模型(原始模型中,E方向速度标准差为1.715 mm/a,N方向速度标准差为1.723 mm/a)。
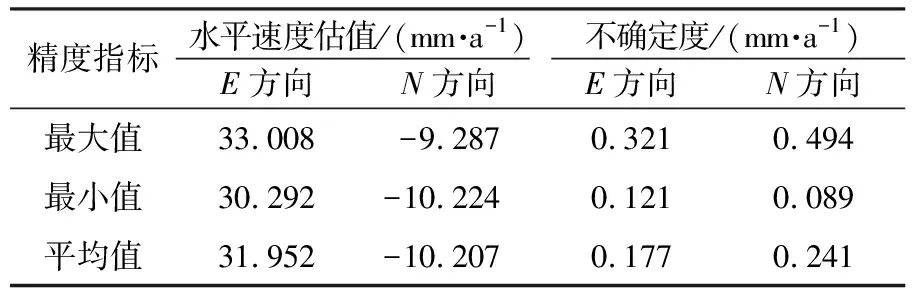
表3 水平速度估值和不确定度统计
绘制经最优噪声模型改正后ITRF2014框架下的山西垂直方向运动速度场,如图6所示。
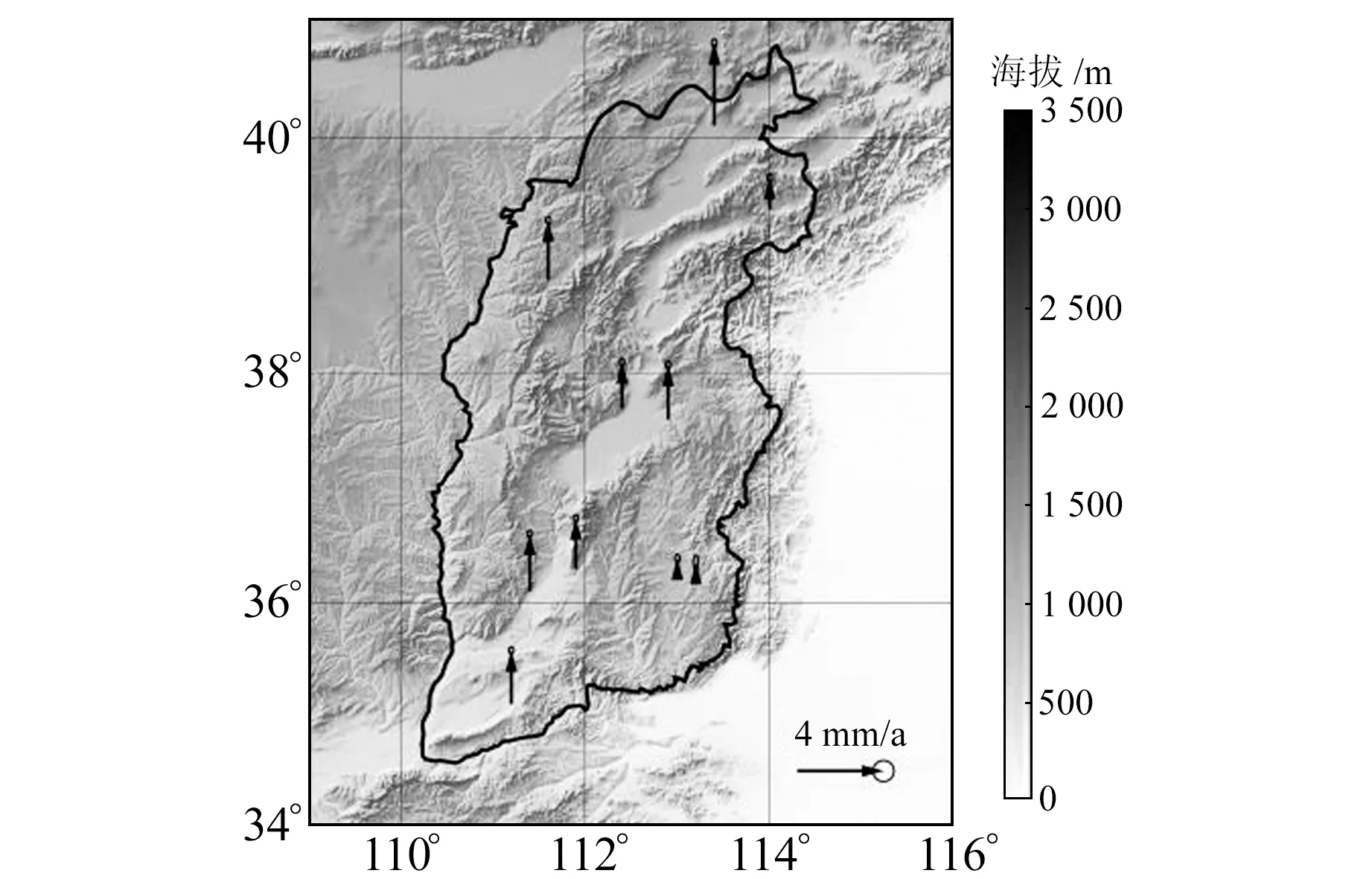
图6 修正后的垂直方向速度场Fig.6 Corrected vertical velocity field
表4给出经最优噪声模型修正后ITRF2014框架下的山西省CMONOC基准站垂直方向的速度估值和不确定度统计结果。由表可知,本文获取的山西省CMONOC基准站垂直方向的速度精度较高,速度标准差为0.906 mm/a,且整体精度优于未经修正的原始速度场模型(原始模型垂直方向的速度标准差为1.161 mm/a)。
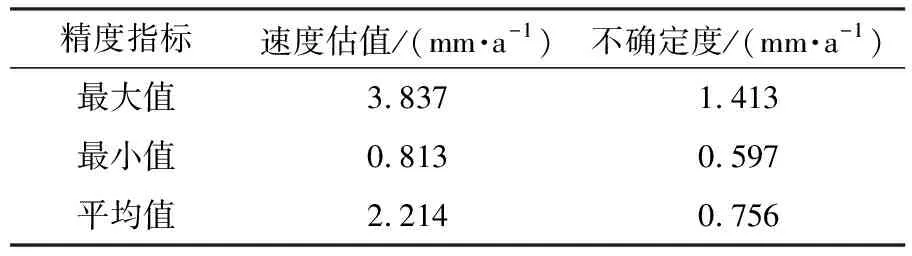
表4 垂向速度估值和不确定度统计
对比修正前后的速度场模型可知,经最优噪声模型修正后的速度场精度明显优于未修正的速度场,且二者在水平方向上的运动速率最大差值为4.025 mm/a;水平运动方向角的最大差值可达6°50′15″;垂直方向上的运动速率最大差值为2.627 mm/a。因此,在处理坐标时间序列数据及解算速度场时有必要考虑有色噪声的最优模型。
采用N方向的最优噪声模型WN+PL与E、U方向的最佳噪声模型WN+FN,结合BIC数值分析法,对山西省10个陆态网络连续观测站在三方向的速度场进行估计,结果如表5所示。可以看出,山西地区陆态网络连续站总体呈向E沿顺时针运动,这与成诚等[4]的研究结果一致;在垂直方向上,南部地区的运动速率相对较低且运动速率差值较大,可以推断,南部地区沉降速率大于北部地区,这与曾波等[2]的研究结果一致。
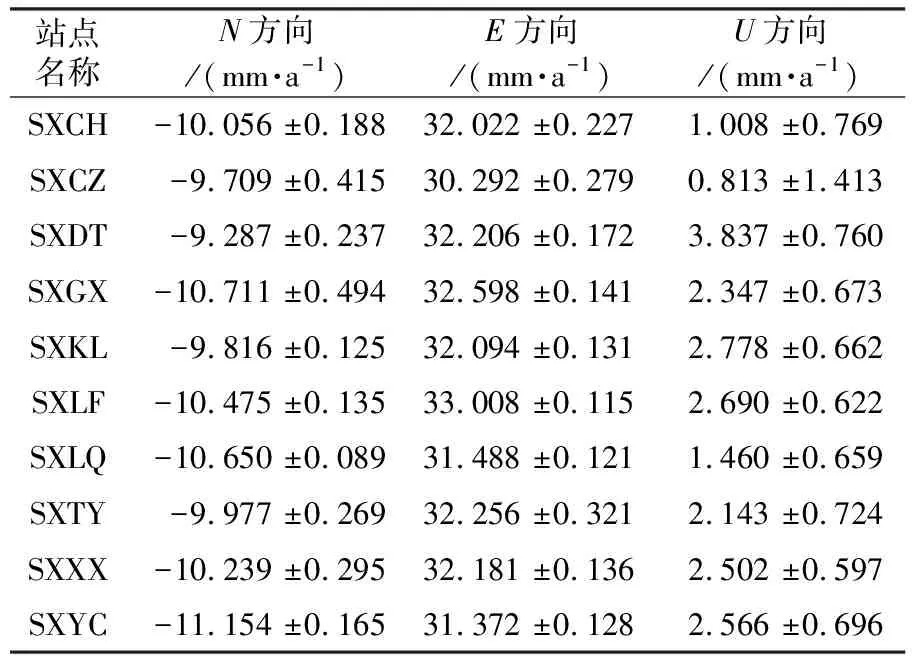
表5 山西省陆态网络连续站区域速度场估计
4 结 语
本文选取中国地震局GNSS数据产品服务平台(http:∥www.cgps.ac.cn)提供的山西省10个CMONOC连续站10 a的坐标时间序列观测数据,利用BIC数值分析法获取了山西地区各坐标分量对应的最优噪声模型,并确定了修正后的山西陆态网络速度场,得到如下结论:
1)通过近10 a的观测数据得到了较为稳定且可靠的三方向坐标时间序列与最优噪声模型的关系,且N方向和E、U方向具有明显不同的噪声特性:在N方向上,最优噪声模型为WN+PL;在E、U方向上,最优噪声模型均为WN+FN。
2)山西陆态网络基于ITRF2014框架下的速度场,在水平方向的平均运动速率为33.542 mm/a,运动方向为SEE 26°22′12″;垂直方向的平均运动速率为2.214 mm/a。
3)经最优噪声模型修正后的速度场精度明显优于未修正的速度场,二者在水平方向上的运动速率最大差值为4.025 mm/a;水平运动方向角的最大差值可达6°50′15″;垂直方向上的运动速率最大差值为2.627 mm/a。因此,在处理山西地区坐标时间序列数据及解算速度场时考虑有色噪声的影响十分必要。
