Bayesian Multidimensional Scaling for Location Awareness in Hybrid-Internet of Underwater Things
2022-01-26RuhulAminKhalilNasirSaeedSeniorMohammadInayatullahBabarTariqullahJanandSadiaDin
Ruhul Amin Khalil,,Nasir Saeed, Senior,Mohammad Inayatullah Babar,,Tariqullah Jan,and Sadia Din,
Abstract—Localization of sensor nodes in the internet of underwater things (IoUT) is of considerable significance due to its various applications,such as navigation,data tagging,and detection of underwater objects.Therefore,in this paper,we propose a hybrid Bayesian multidimensional scaling (BMDS)based localization technique that can work on a fully hybrid IoUT network where the nodes can communicate using either optical,magnetic induction,and acoustic technologies.These communication technologies are already used for communication in the underwater environment; however,lacking localization solutions.Optical and magnetic induction communication achieves higher data rates for short communication.On the contrary,acoustic waves provide a low data rate for long-range underwater communication.The proposed method collectively uses optical,magnetic induction,and acoustic communication-based ranging to estimate the underwater sensor nodes’ final locations.Moreover,we also analyze the proposed scheme by deriving the hybrid Cramer-Rao lower bound (H-CRLB).Simulation results provide a complete comparative analysis of the proposed method with the literature.
I.INTRODUCTION
INTERNET of underwater things (IoUT) has attained much attention because of their many applications such as navigation,objects localization,detection of mines,and monitoring of environmental pollution [1]–[4].The growth of IoUT is in its early phase and faces innumerable challenges.For example,in terms of communications,the radio frequency(RF) waves do not provide satisfactory outcomes due to various factors such as scattering and absorption in an underwater environment.In contrast,acoustic waves are vastly utilized for underwater communication due to its lowabsorption in water [5],[6].The acoustic waves can travel for long distances up to tens of kilometers,but with low data rate and have a substantial propagation delay [7].Therefore,to provide better data rates and a little propagation delay,optical communication is recently used to develop optical-IoUT networks.Optical communication is utilized to correspond among the underwater things for shorter range and consists of high-quality light-emitting diodes (LEDs) or lasers.Optical communication provides higher data rates compared to its counterpart technologies [8],[9].However,propagation of optical light in the underwater environment is profoundly affected by the inherent properties of light,type of water,salinity,and turbulence [10].Nevertheless,magnetic induction (MI) is also utilized for underwater communication to provide high data rates.However,MI has a limited transmission range and is also affected by the conductive nature of the water [11]–[13].
Besides communication,localization in IoUT is of significant importance for tracking various underwater sensor nodes,data tagging,and detection of underwater targets [1].Moreover,the classical localization techniques for terrestrial IoT networks do not function well in marine environments due to the harsh nature and non-availability of the Global Positioning System (GPS).It is straightforward that GPS works well in terrestrial networks,but its performance degrades when used in an indoor [14],[15] and underwater environment [16].Moreover,the underwater monitoring systems demand accurate localization techniques as the collected data is only useful if the nodes’ location is estimated accurately [17],[18].Based on the communication technology used,underwater localization techniques can be divided into acoustic,optical,and MI-based systems.Various localization techniques for acoustic underwater sensor networks have been investigated in the past.These techniques consider different aspects of the system such as signal propagation model,network topology,environmental factors,localization accuracy,number of anchor nodes,the geometry of anchor nodes,and the sensor node’s relative location to the anchors[19],[20].Most of the acoustic-based underwater localization systems use time difference of arrival (TDoA) ranging.However,the TDoA measurements for distance estimation in underwater acoustic communication channels are highly affected by multi-path.Similarly,the RSS-based distance estimation also suffers from multi-path propagation,making it hard to compute accurate distance estimation [21].Nevertheless,the underwater acoustic channels show good transmission features at certain depths where RSS-based distance estimation can be a good option [22].
Underwater optical wireless communication mainly suffers from attenuation,scattering,and absorption [23],[24].Based on these impediments,the existing literature only presents the time of arrival (ToA) and RSS-based underwater localization schemes.For instance,[24] proposes an underwater optical positioning system using both ToA and RSS-based ranging,where optical base stations (OBS) are used as anchor nodes.The sensor nodes receive the transmitted optical signal from various anchor nodes and locate themselves by utilizing a linear-least-square solution.In contrast,a distance estimation technique based on RSS has been presented in [25] for a given underwater optical communication network.This technique strongly relies on various parameters that include properties of the optical channel,transmitted power,angle of divergence of the transmitter,trajectory angle,and field view of the receiver.Some recent works also use magnetic induction (MI) for underwater communication and localization.[26] proposes a novel MI-based localization technique that utilizes received magnetic field strength (RMFS) for measuring RSS.The proposed system properly eliminate multi-path fading and utilizes constant properties of the MI channel.
Hence,many location awareness methods have been developed in the past to accurately estimate the position of the underwater nodes using different communication technologies.Likewise,there exist some other localization techniques that utilize the fusion of acoustic and optical communication technologies in finding the position of unknown nodes.Recent studies show that the hybrid approach can achieve better accuracy and have more network flexibility.Therefore,in this paper,a fully hybrid location awareness algorithm has been proposed that considers three different technologies including MI,acoustic and optical communication.Such an approach where the system can use any available technology,is also termed as a signals-of-opportunity (SOA) based localization.The main contributions of this paper are summarized as follows:
1) SOA based hybrid approach is introduced for localization of IoUT devices in the underwater environment,which takes into account acoustic,optical,and magnetic induction based ranging.
2) BMDS based dimensionality reduction technique,along with Procrustes analysis,is used to estimate the position of underwater IoUT devices.The proposed method uses the ranges from the received power using either optical,MI,or acoustic communication.
3) A hybrid Cramer-Rao lower bound (H-CRLB) is derived for the analysis of the proposed scheme.Numerical results show the effectiveness of the proposed method,where it achieves the H-CRLB.
The rest of the paper is characterized as follows.Section II presents a brief survey of the literature and challenges in underwater localization.In Section III,we present the network model and MIAO ranging technique.In Section IV,we propose BMDS based system modeling for localization in an IoUT and study its effectiveness for a hybrid optical-acoustic magnetic induction approach.In Section V,performance evaluation of the proposed system is carried out,followed by simulation results and conclusion in Sections VI and VII.
II.RELATED WORK AND CHALLENGES
A.Literature Background
The localization algorithms for wireless networks are divided into three categories.The first category involves algorithms that are either centralized or distributed [8].In centralized algorithms,ranging measurements from all the nodes are shared with a central node to find their respective location.On the contrary,in distributive algorithms,each node can locate itself with the help of available anchors.The second category includes range-based and range-free localization schemes.The range-based localization methods usually work with the measurements priorly available among the nodes to accurately locate unknown nodes [8].In contrast,the range-free schemes only consider the proximity information and can work effectively without requiring the actual ranging measurements.Whilst the range-free schemes are simple and easy in a design perspective,but provide less accuracy in position estimation as compared to range-based techniques.Range-based location awareness techniques usually necessitate different ranging measurements such as angle of arrival (AoA),ToA,TDoA,and RSS [27].The third category solely depends on the availability of anchor nodes,i.e.,anchor-based and anchor-free schemes for localization.The anchor-based schemes require the availability of at least three anchor nodes in a 2D-space for a node to be able enough to localize itself.Oppositely,the anchor-free methods do not require anchor nodes for self-localization.It only utilizes the estimated local distances among the nodes to locate the unknown node effectively.A technique known as the linear least square solution is applied to further refine the estimated position of the node.
In the range-free localization schemes,the most critical and well-known methods applied are usually based on the reduction of dimensionality.BMDS is considered as one of the fundamental dimensionality reduction techniques that are utilized extensively for localization [28]–[31].Some other applications of BMDS include socioeconomics,political science,statistical economics,and behavioral sciences.Besides,BMDS is also used for the localization of nodes in IoT networks.According to [32],the connectivity problem between two nodes is addressed by BMDS for the precise geometrical representation of the connecting nodes.Initially,BMDS is used to calculate the local maps of the sensor nodes which are then combined to obtain the global mapping.Manifold learning is another localization technique used for position estimation in wireless sensor networks [33].Applying BMDS for the localization of a hybrid IoUT system is not straightforward since multiple range measurements are available,which need to be integrated before location awareness in the given underwater environment.
In this paper,we have utilized a centralized RSS-based ranging algorithm with the presence of anchors.First of all,centralized network localization schemes have better localization accuracy in harsh environments,such as underwater or underground.In centralized ranging,the end-user does not require to localize itself due to limited resources.Usually,its location is computed periodically by either the surface buoy or sink node.Secondly,range-based mechanism is used due to its better accuracy compared to range-free schemes [34].Moreover,the logic behind considering the RSS-based approach is that the received power in communication systems is already available,and based on the channel,it can be converted into estimated distances.Since we are considering a hybrid model,time-based or angle-based ranging can lead to extra complexity and cost of the system [15].
Recently,BMDS-based localization for underwater applications has gained much importance due to its robustness and accuracy in position estimation.The marine environment is quite harsh,turbid,and hazy where robust optimization techniques need to be used for localization of IoUT devices accurately.Many variations of BMDS-based localization schemes are used in the literature,such as unconstrained optimization conjugate gradient method for multi-hop underwater networks based on optical medium.To the best of our knowledge,none of the existing works tackle the problem of a fully hybrid IoUT network localization.Therefore,this paper provides BMDS-based localization scheme for a hybrid magnetic induction-acoustic-optical (MIAO) underwater communication system that works on SOA approach.The proposed scheme is novel in the context that it is used for the very first time in an underwater environment to localize IoUT devices.Furthermore,Procrustes analysis provided in [35] is applied to precisely estimate the final position of the nodes in the given hybrid system.Later on,an H-CRLB is also derived to define the lower threshold for position estimation of the proposed system.Simulation results are carried out in Matlab,to show that the proposed model is efficient and provides greater accuracy in position estimation using SOA approach.The next section provides a detailed layout of the network model and proposed technique for efficient localization in the IoUT.
B.Challenges in Hybrid-IoUT
Although the hybrid approach brings new opportunities,it also poses many challenges that need to be considered when performing localization in the underwater environment.Some of these challenges include variations in seawater characteristics,misalignment for optical links,latency in acoustic connections,and coil orientation mismatch in magnetic links[1].The acoustic and optical links undergo severe performance degradation when impacted by seawater’s refractive and composition properties.The refractive index changes occur due to variation in temperature,turbulence,and salinity,while the composition of water depends upon changes in the geographic location.Moreover,in acoustic links,increasing the transmission power can maintain a certain SNR level;however,several other factors degrade the SNR in optical links,such as attenuation-and-scattering,misalignment,divergence angle,and field of view.Analogously,a major issue with acoustic links is higher latency that can be minimized using multi-hop networking; however,it cannot be fully eliminated and must be considered when designing a hybrid underwater model.
On the other hand,MI systems require proper orientation of the transceivers’ coils in the harsh underwater environment.Although this can be achieved at the deployment stage as the transceivers certainly drift with ocean tides,and currents get rotated to undesired directions.Another critical factor for underwater MI communication is the eddy current loss due to the magnetic field.For instance,MI as a carrier in an aquatic environment can only achieve a range up to 30 m at an operating frequency of 500 Hz [5].
Therefore,we propose a hybrid MIAO model where each communication technology supports the other,resulting in a better communication and localization performance.Nevertheless,integration of these various technologies in the underwater environment is quite a daunting task.Integration of multiple communication systems requires a combination of electronics components,sub-systems,chip-level assembly with specific system functionality.The proposed model can foster interaction among numerous disciplines that will impact electronics,photonics,electromagnetism,and underwater communication systems.Consequently,there is a need to address the scientific issues and challenges associated with the underpinnings of systems integration in hybrid communication networks.The aim here is to achieve effective underwater communication and localization utilizing these different available underwater communication systems.
III.NETWORK MODEL AND RANGING
This section first describes the network model,then introduces the novel concept of MIAO ranging,and finally the use of BMDS for IoUT localization.
A.Network Model
Consider an IoUT network that is composed ofManchor nodes andNsensor nodes.These nodes are presumed to be lying and embedded on the sea bed,and few of them are suspending sensor nodes.Fig.1 depicts a generalized overview of the proposed network where the underwater objects with unknown location are communicating using various technologies.Note that,the system is hybrid and can use any of the available optical,magnetic induction,and acoustic technologies for communication among them and with the surface buoy.Also,M<N,and the location of each anchor node is a well-known prior.According to the proposed methodology,it is assumed that each underwater object is able enough to communicate with each other object in the network through at least one path (connected network).A surface buoy is needed to collect and share the respective information shared by every node of the network.
The proposed algorithm comprises three major steps defined as follows.
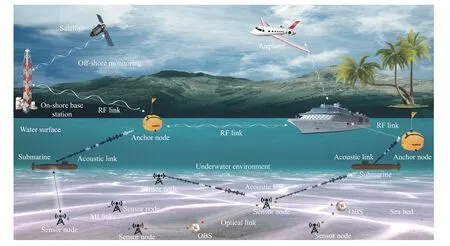
Fig.1.Proposed model for hybrid-internet of underwater things (H-IoUT).
1) Each sensor node attempts to search for the overall neighbourhood by utilizing any of the communication technology and estimate the range to the adjacent nodes.
2) Some sensor nodes are not lying in the communication range of each other and can utilize the available connectivity information and estimate the missing pairwise ranges.
3) The information from each node is communicated to the surface buoy through SOA approach.The initial ranging of every node is carried out on SOA approach that utilizes the characteristic of any available underwater links such as acoustic,optical,MI or hybrid.This approach enhances the estimation of distance among available nodes.The surface buoy utilizes the information provided and calculates the estimated distance matrix in a pairwise manner.It further applies the dimensionality reduction methodology based on subjective manifold interpretations to accurately locate each sensor node.
In the following,we describe the different types of ranging methods and their integration into the SOA concept.
B.Underwater Magnetic-Induction Ranging
The exchange of information among various anchor and sensor nodes in MI-based IoUT truly depends upon the timevarying magnetic field.The time-varying magnetic field is basically generated by the modulated signal transmitted from transmitter coil antenna [36],[37].It is also responsible for the communication among the anchor and sensor nodes using magnetic induction (MI) phenomena as a medium.The fabrication of the time-varying magnetic field is carried out by transmitter coil antenna through a sinusoidal modulated signal and induces current in the receiver coil antenna of the receiver.The induced current is responsible for demodulation of the signal to retrieve the embedded information.The realization of an MI-based transceiver is depicted in Fig.2.Assume that the current flowing through the transmitter coil antenna is represented by
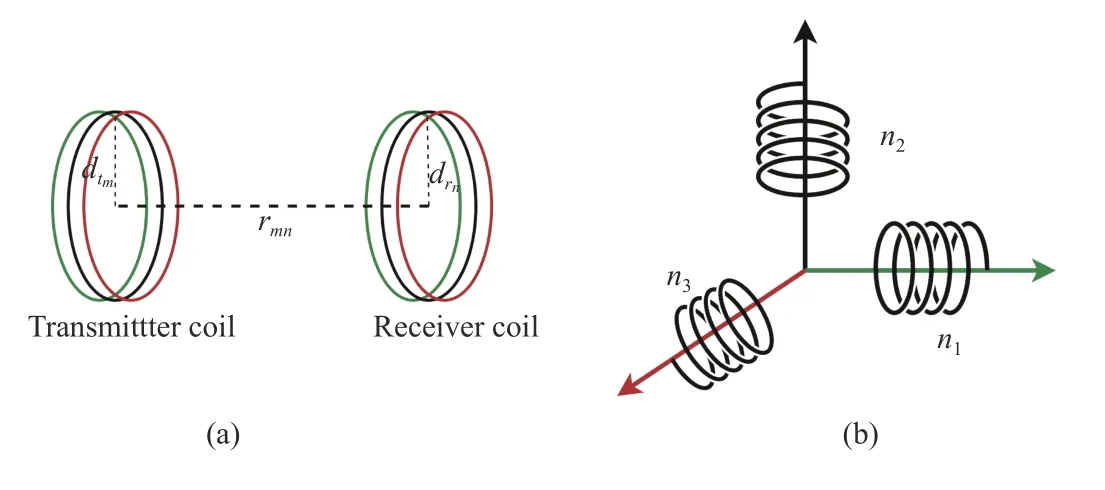
Fig.2.(a) MI link for underwater communication; (b) Tri-directional coil antenna.

whereI0is termed as the direct current,the term ω in the superscript represents the angular frequency,wheretshows the instantaneous time.The direct currentI0is responsible for inducing the current in the neighboring coil antenna by a phenomenon known as mutual induction.It should be noted that mutual induction phenomena do not result well if the transmitter and receiver coil antennas are not accurately coupled.The underwater environment is harsh; therefore the assumption of a tri-directional coil is used [38].The tridirectional coil antenna can receive strong induced signals if there comes little variation in the coupling formation and thus making it omnidirectional.
The coils in the tri-directional antenna are mutually orthogonal,and hence,do not interfere with the reception of each other.The signals received at any of these mutually orthogonal coils are combined at the receiver to demodulate the required information.The use of tri-directional antenna essentially reduces the misalignment factor and improve the overall communication [38].According to [39],the MI-based relationship between the power transmittedPMItmand power receivedPMIrn,for some high range of frequencies and large number of turnsZtmin coil antenna of the transmitter is expressed by

in (2),the term μ provides the permeability of water,wheredtmis the diameter of transmitter coil antenna.Also,the termZrnshows the number of turns in the receiver coil,anddrnis the respective diameter of the receiver coil antenna.ϑmnis the angle between the axis of transmitter and receiver coil antennas,D0is the impedance of unit length loop,andrMImn=||αm-αn||is the Euclidean distance between the transmitting and receiving coil antennas.It should be noted that path loss in (2) does not consider the phenomena of skin depth.According to [40],,the received power for MI channel is defined as

whereLMI[dB] is the path loss andSis the Gaussian distributed random variable with zero mean and standard deviation of φ .ForNnumber of received magnetic field strength measurements,i.e.,PMIr1,...,PMIrN,which are identical and independent Gaussian variables with mean ΘMIand variance φ2.Then,the likelihood function ℓ(·) can be written as
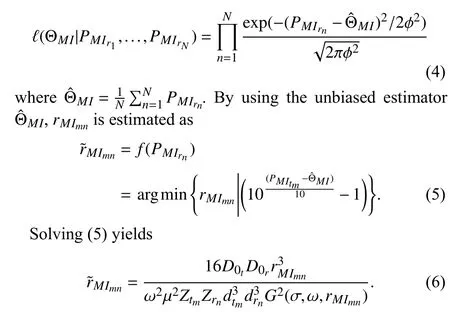
The termG2(σ,ω,rMImn) represents the loss occurred due to skin depth,where σ gives the electrical conductivity of water.It is observed that the values of σ changes with the types of water.For instance,the value of σ = 0.01 S/m for clean water,but it goes to a higher value of σ = 4 S/m for turbid sea water.These performance degrading factors of the MI technique in different types of underwater environment needs the coil configuration to be selected carefully in order to avoid the losses.
C.Underwater Acoustic Ranging
Acoustic ranging works well even for a larger distance in an underwater environment compared to MI.The acoustic channel in underwater medium experiences two types of losses during propagation: delay spreading and path loss attenuation [41].The delay spread is caused by the combined effect of cylindrical and spherical losses,while the path loss attenuation occurs due to multiple effects such as absorption,scattering,leakage from ducts and diffraction [42].Usually,the path loss function in an underwater environment between any two nodesmandncan be computed using the following equation:

where υcis the cylindrical loss,υsis the spherical loss,φ represent coefficient of absorption,andrAmnis the corresponding Euclidean distance between the two nodes for acoustic communication.According to Thorp model for absorption given in [43],the factor φ only depends on the frequencyfof the transmitted signal given by

The spherical spread loss works effectively in underwater environment and; therefore,ignoring the loss due to cylindrical spreading,we achieve

from (9),the distance is estimated fromby utilizing only the real term of the Lambert functionW0as follows [44]:

D.Underwater Optical Ranging
Optical communication in an underwater environment mostly suffers from a number of parameters such as scattering,absorption,angular attenuation,and widening .It has been noticed that angular attenuation and widening of the optical signals during underwater communication is purely dependent on the wavelength of the transmitting signal.Conferring to [45],the loss coefficientl(λ) is based on the coefficient for scatterings(λ) and absorptiona(λ),which is given by

the loss occurrenceLmnduring underwater propagation depends upon the euclidean distancerOmnand loss coefficientl(λ).Their mutual relationship is expressed by

Here,we assume line-of-sight (LOS) underwater optical communication,where the nodemdirectly communicate with nodenusing the optical light.According to ,the power receivedPOrnatnodenas a result of LOS communication with nodemis givenby

wherePOtmrepresents the total power transmitted by nodem,whereas ηmand ηnare the optical efficiencies of nodesmandn,respectively.The aperture area of thenis given byAn.Also,various angles such as the angle of aperture between the trajectories of nodemand noden,that is represented by θ,moreover the angle of divergence of the transmitted signal is given by θ0.In literature,many modulation techniques are used for optical wireless communication,but intensity modulation with direct detection (IM-DD) is a commonly used method.The expression for bit-error-rate (BER) for performance evaluation of IM-DD with ON/OFF shift-keying model is calculated with Poisson model that is basically given by the number of photons reached at the photon counter.The number of photons ς arrived at nodenin the time durationTcan be expressed as follows:

whereDris the data transmission rate,his the Planck’s constant,andis the respective speed of light in water.The BER for photons arriving at nodencan be computed as

whered1=dr+dn+dgandd0=dr+dgsymbolize ς essential for binary transmission 0 and 1,respectively.erfc(·) is the complementary error function for the photons arriving at noden.Also,dris the dark count noise,whiledgrefer to the noise added as result of contextual enlightenment.According to[46],by substituting the values ofd1andd0in (15) and solving fordnwe get

Now,putting (14) and (15) in (16),the optical distancebetween nodemand nodencan be obtained as
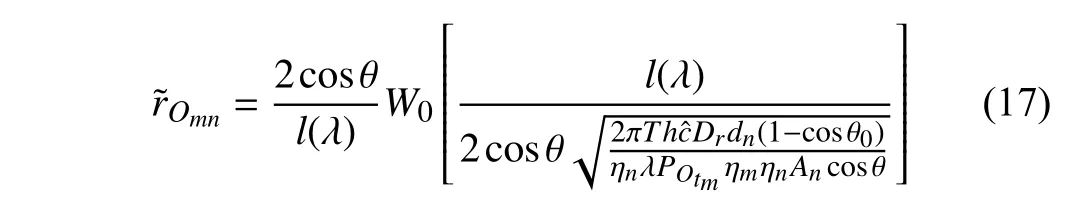
whereW0(·) is known as the real part of LambertW0function.
E.Hybrid MIAO Ranging Model
The noisy range measurements,are calculated using (6),(10),and (17),respectively.In order to define the matrix for all the noisy range measurements,consider that
Now combining them all together we get

whereK=M+Nrepresents the total number of anchor and sensor nodes.In order to formulateK,all dimensional spacesare well approximated asrmn.The error between actual and estimated range measurements is minimized by cost function given as

whereL={l1,l2,...,lK} represents the 3D coordinates of allKnumber of nodes.Also,γmnis the weight between any two nodesmandn,and is defined based on the ranging error variance,i.e.,,where the noisy range measurements are down-weighted by the large noise variance and vice-versa.Note that if no range measurements available b∑et weenm- th andn-th,thenγmn=0.Also,weassu me that,i.e.,symmetric weights.In literature,many techniques have been presented to tackle the optimization problem,but none of those techniques uses more than one ranging measurements.Here,we propose a hybrid MIAO model that utilizes multiple input ranging measurements.For the hybrid MIAO ranging,the objective function is characterized as follows:

where ð(w)shows the importance ofw-th iteration such that.Also,the term τ is the controlling factor andDis the total number of dimensions.The controlling factor for weighting is assumed to be (τ >1),in order to define the overall distribution of multiple observations.Selecting only one view is not optimum in any case while ignoring the rest.Therefore,the proposed model assumes the combination of weights for each iteration view.
IV.PROPOSED LOCALIZATION TECHNIQUE
Utilizing the BMDS technique and Procrustes analysis,the proposed method is characterized as follows:
1) The MIAO based single hop ranging is used to find the shortest path distances among all pair of anchor and sensor nodes in the given network.Once all the pairwise distances are obtained,the completion of distance information matrixis achieved,i.e.,

Matrix R is a square symmetric matrix.
2) BMDS technique is applied to matrix R for the estimation of relative coordinates.According to [47],Kruskal outlined a stress function that basically minimizes the loss function to estimate the relative coordinates,i.e.,

Minimizing the above loss functions yields the estimated positions of all nodes expressed as.The minimization is achieved using double centering matrix R,i.e.,

The relative coordinates of all available nodes are measured utilizing the two largest eigenvalues provided by v,and the corresponding eigenvectors u as follows:

which can also be written as

3) Once BMDS calculates the initial estimated coordinates of the nodes,the global transformation method is utilized to transform these coordinates to their absolute equivalent coordinates.This method essentially finds out different parameters such as the scaling,rotation and translation.These parameters should best reflect the actual underlying coordinates.Assume that there existMnumber of anchor nodes in a 3D space,with actual coordinates equal to αj={xj,yj,zj},and range of 1 ≤j≤M.It should be noted that the relative coordinatesmust match the actual coordinates αj={xj,yj,zj} for all theManchor nodes.Also,the relationship between the actual and relative coordinates is computed by

This relationship can also be expressed in terms of an objective functionq(ξ,ν,κ),where ξ is the scaling factor,ν is the rotation factor,and κ is the respective translational factor.According to linear transformation,the objective function can be written as

The objective function in (29) can be minimized by determining the optimum values of ξ,ν,and κ,i.e.,

For anchor nodes,assume that b0and c0are the centroids for the actual and estimated locations,respectively.These centroids are represented as
In order to achieve optimum translation,the objective function is expressed as
Now using (34),the optimum translation factorthat minimizes the above objective function,can be expressed as

In terms of the centroids c0and b0,(35) can be written as

By considering the condition of b0=c0=0 and substituting(36) into (34),the objective function can be simplified as follows:

The above objective function obtained is convex and differentiating it with respect to ξ,the optimum value ξ that minimizes the overall functionq(ξ,ν,κ) is calculated as

where Tr(·) is known as the trace operator.The optimum rotation matrixis expressed in terms Eigen-decom position of the factorsas

whereasuandare the respective eigenvectors and eigenvalues of α.Likewise,the term κ can be described in terms of

Finally,with the use of optimum parameters,,,the actual positions of all nodes in the given network can easily be computed by

4) Energy Consumption Vs.Localization Accuracy: The IoUT network comprises battery-operated sensor nodes with a limited amount of onboard energy operating in a harsh environment.Therefore,these IoUT networks require the designing of energy-efficient protocols to improve the lifetime of the network.In the case of our proposed MIAO model,we can express the total energy consumed by allM+Nnodes as
whereEBis the energy required for a single bit transmission andRmis the achievable transmission range ofm-th node.It is clear from (43) that energy consumption is proportional to the square of the transmission range for each node in the given hybrid network.Both communication energy consumption and localization accuracy rely on the transmission rangeRm.Therefore,we introduce the following energy error product as a benchmark to confer the trade-off between energy consumption and localization accuracy

where RMSE represents the average root-mean-square-error of all nodes in the given network.The RMSE as a function of estimated and actual nodes locations can be written as
Now substituting (43) and (45) in (44) results in
Simplifying (46) yields
According to (47),the energy-error product can be optimized by finding the minimum ofC(R) function.
5) Computational Complexity: The fundamental step in finding a sensor node’s location in network localization schemes is measuring the pairwise distances.Afterward,an optimization method needs to be followed to minimize the inconsistency between the estimated pairwise distances and actual Euclidean distances.Usually,single-hop distances among the neighbors are measured using ranging methods[48],[49].The complexity to estimate the pairwise distances from these single-hop distances isC(K3),whereK=M+N(total number of nodes).Moreover,the computational complexity for global transformation,i.e.,from local coordinates to global using anchor nodes isC(M2)+C(K).Therefore,the total time complexity can be expressed as

in (48),the termC(K3) represents the total complexity which is dominated byC(K3).
V.PERFORMANCE EVALUATION OF THE PROPOSED MODEL
Gaussian noise degrade the performance of ranging measurements ρmndue to is probabilistic nature.Therefore,the probability density function (PDF) of the ranging measurements ρmnwith specified locations ofmandncan be expressed bys(ρmn|αm,αn) in terms of

Note that noise variance for estimated range measurements are correlated with the distance by.The consequent ratio of log likelihood is depicted asEmn=log(s(ρmn|αm,αn)).The same when converted to decibel(dB) scale can be written as follows:
It is further anticipated that ρmnis degraded by the environmental noise,independent in nature.So,considering the effect of noise with joint ratio of log-likelihood to estimate the range of almost each set of pairwise measurements.

whereM+Nshows the total number of anchor and sensor nodes.Further solving (51) yields
Based on this log-likelihood ratio,the H-CRLB is derived.The H-CRLB is basically a lower threshold on the estimator variance that is unbiased [50],and thus,providing a benchmark to accurately evaluate the designed algorithms in terms of performance.The H-CRLB technique is based on Fisher information matrix (FIM) [51] represented by Φ and expressed as

where Cαm,αnis term edas the expected value for second order derivative of the ratio of log-likelihoodΨmn.The FIMin terms of sub-matrices is given as follows:
The subscriptsxx,yy,andzzrepresent the diagonal sub matrices for the consideredFIM.On the other hand,thexy,xz,yz,xyT,xzT,andyzTrepresents the sub-matrices that are non-diagonal.Furthermore,the diagonal elements for each sub-matrix ranges fromm=1,2,3,...,Kare given as
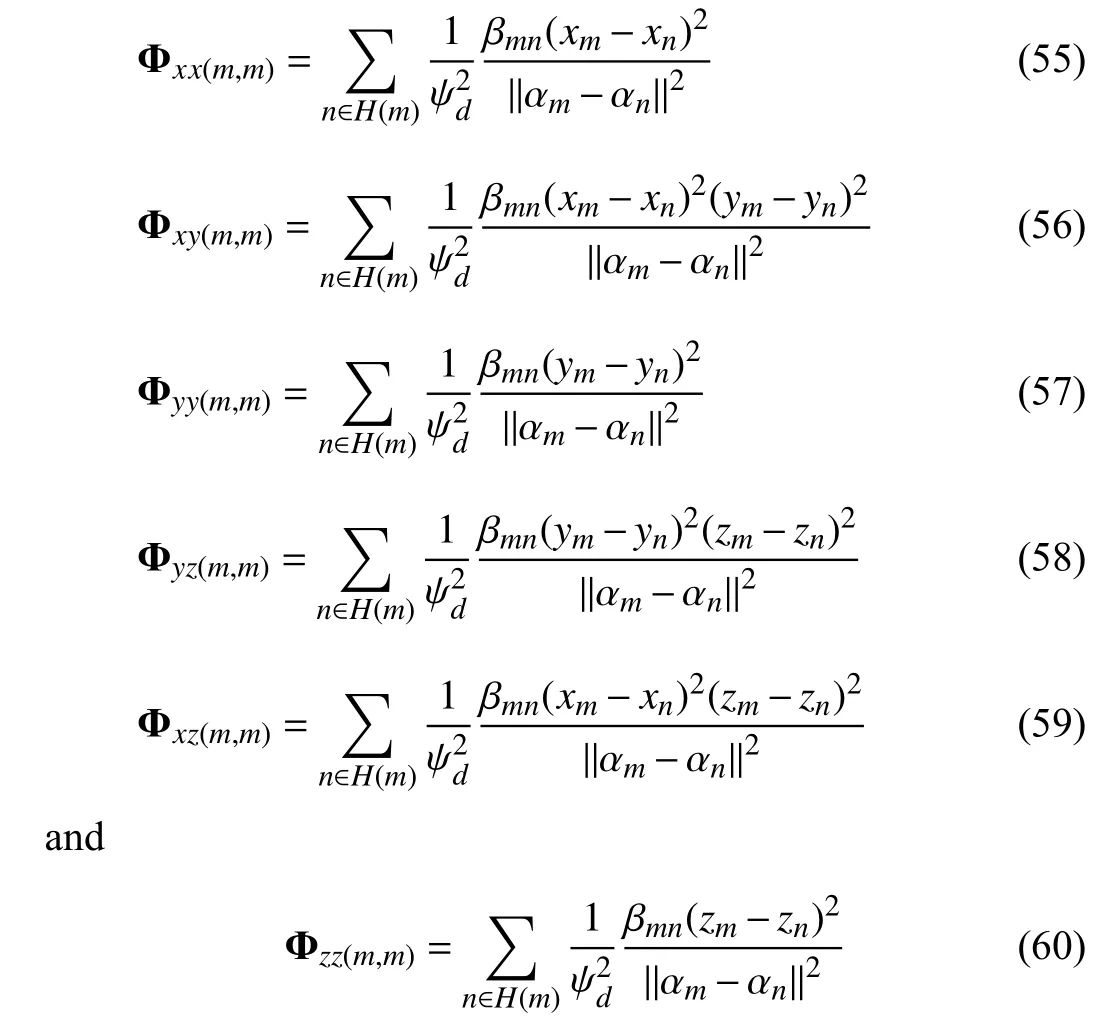
respectively.Similarly,the non-diagonal sub-matrices,wherem≠nform,n=1,2,...,Kare given as
The term βmnin the above expressions is known as the scaling factor that is dependent on the distance estimated among the nodes and can be written as

On the basis of Φ,the H-CRLB for position estimation of the sensor nodes can be specifically expressed as

The term Φ-1is the inverse of FIM.The relationship between the root-mean-square-error (RMSE) (given by (45))and derived H-CRLB is given as

VI.SIMULATION RESULTS AND DISCUSSION
MATLAB is used as a simulation tool for performance evaluation of the proposed MIAO ranging and localization technique for a given IoUT network.The parameters used for the simulations are summarized in Table I.
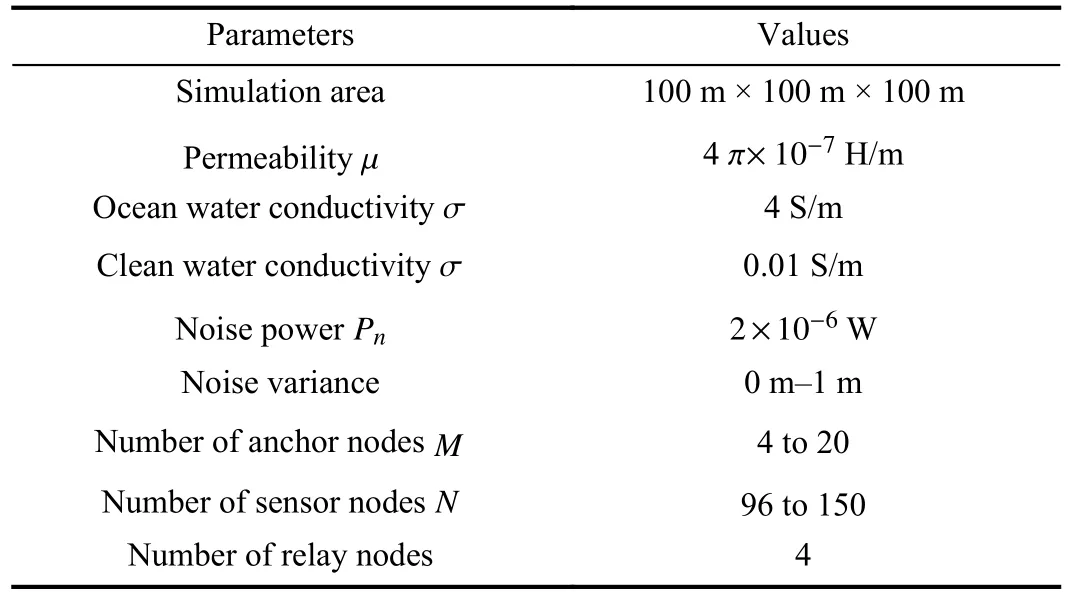
TABLE IPARAMETERS USED FOR SIMULATIONS
A.MIAO-Based Position Estimation
We mainly consider the RMSE as a performance metric to test various parameters of the proposed model.Utilizing (45),where {,,} and {xm,ym,zm} are the respective estimated and actual coordinates of the anchor nodem.We consider a 3D IoUT network setup with sensor nodes,anchors nodes,and relay nodes.Based on recent literature [52]–[54],it is efficient to consider relay nodes in three-dimensional underwater networks.Therefore,in our simulation setup,we considered four relay nodes.The relay nodes can be AUVs or suspended sensors to collect the data from other sensor nodes efficiently.For performance analysis of the proposed method,we have considered two scenarios shown in Figs.3 and 4,respectively.The first scenario consists of sparsely distributed nodes in a 100 m × 100 m ×100 m cubic area with four anchor nodes.In contrast,the second scenario comprises densely populated nodes in the same observation area.Both figures depict that increasing the number of nodes improves the location awareness accuracy mainly due to the low shortest path estimation error in dense networks.It should be noted that simulations are restricted for 100 m × 100 m × 100 m cubic area.This is mainly due to the centralized nature of the algorithm,which requires a connected network.If we increase the network area with the same number of nodes,it will result in a disconnected graph,and Bayesian multidimensional scaling (BMDS) fails to operate on disconnected graphs.
Fig.3.MIAO-based position estimation of sparsely deployed nodes in a cubic area of 100 m × 100 m ×100 m.
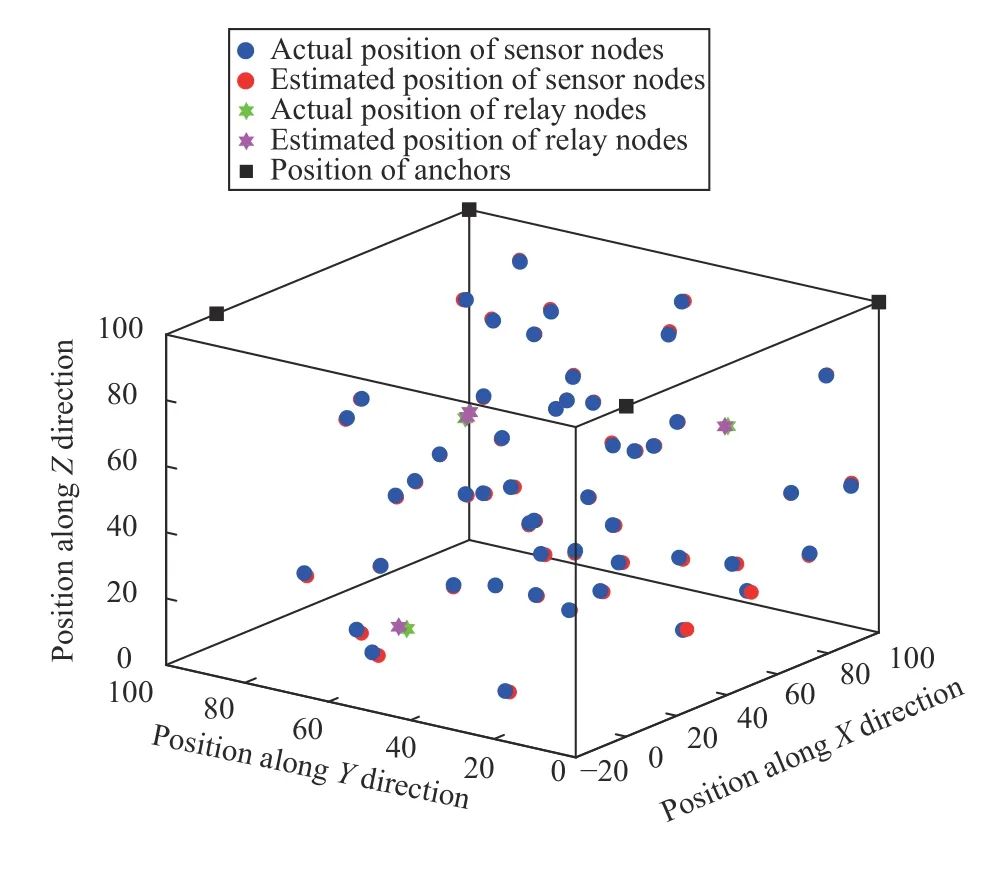
Fig.4.MIAO-based position estimation of densely deployed nodes in a cubic area of 100 m × 100 m × 100 m.
B.RMSE vs.Ranging Noise Variance
We carried out the comparative analysis of the proposed method in terms of various parameters such as noise variance,network density,and number of anchors.Also,the results are compared to some well-known network localization techniques such as compressive sensing and weighted centroid localization (WCL) [55].Intuitively,it is observed that the RMSE increases with an increase in the noise variance,as shown in Fig.5.Indeed,the estimation of missing distances and noise variance affects the overall accuracy of location awareness in the hybrid IoUT network.We have examined the results for proposed MIAO model in the presence of Gaussian noise distribution with zero mean and variance.For simulation results,values of the noise variance are set to approximately 0–1m.Further,it has been noted that the proposed model is robust to error variance as compared to WCL and compressive sensing.The reason behind is better distance approximation of the pair-wise missing distances.
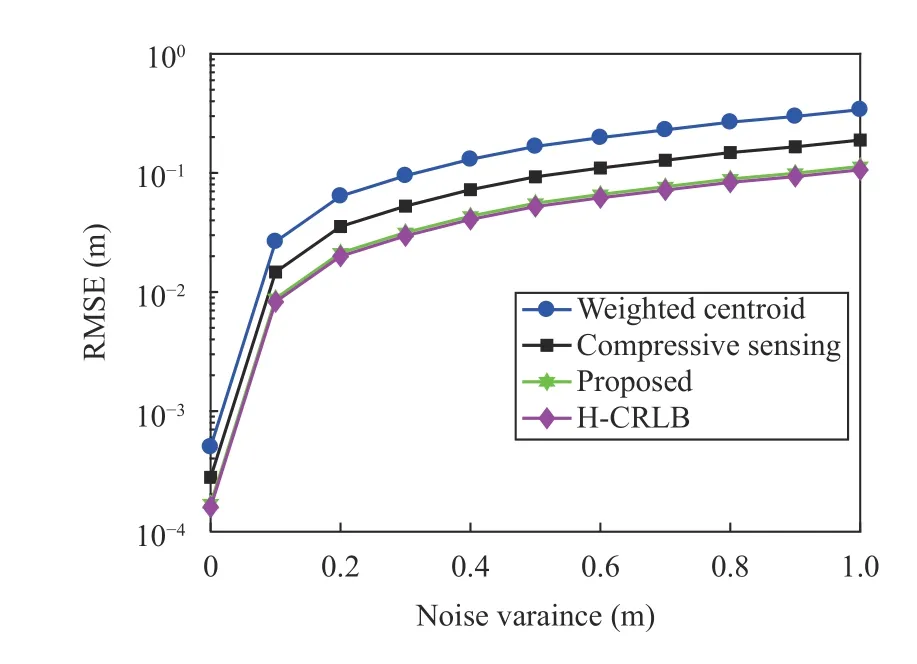
Fig.5.RMSE vs.ranging noise variance.
The ranging noise variance is proportionate to the accurate Euclidean distancermnbetween the anchor nodemand sensor noden.Moreover,the proposed method outperforms the literature because the WCL is center-biased in nature and is not robust to noise.Similarly,the compressive sensing technique requires signal reconstruction from raw data and gets affected by the noisy underwater environment.Hence,the proposed method outperforms both WCL and compressive sensing techniques and is approximately equal to the HCRLB,as shown in Fig.5.The improvement in the proposed method is because of the availability of the accurately estimated missing distances among the various nodes.
C.RMSE vs.Number of Nodes
To show the impact of the number of nodes on the localization accuracy,we consider the same setup of 100 nodes distributed nodes in a 100 m × 100 m × 100 m cubic area with four anchor nodes.Fig.6 shows that increasing the number of nodes for location awareness in hybrid IoUT network results in an improved RMSE.This is mainly due to the improved connectivity of the network.Increasing the number of nodes provides a better shortest path estimation of the range measurements in dense networks than sparsely populated networks.
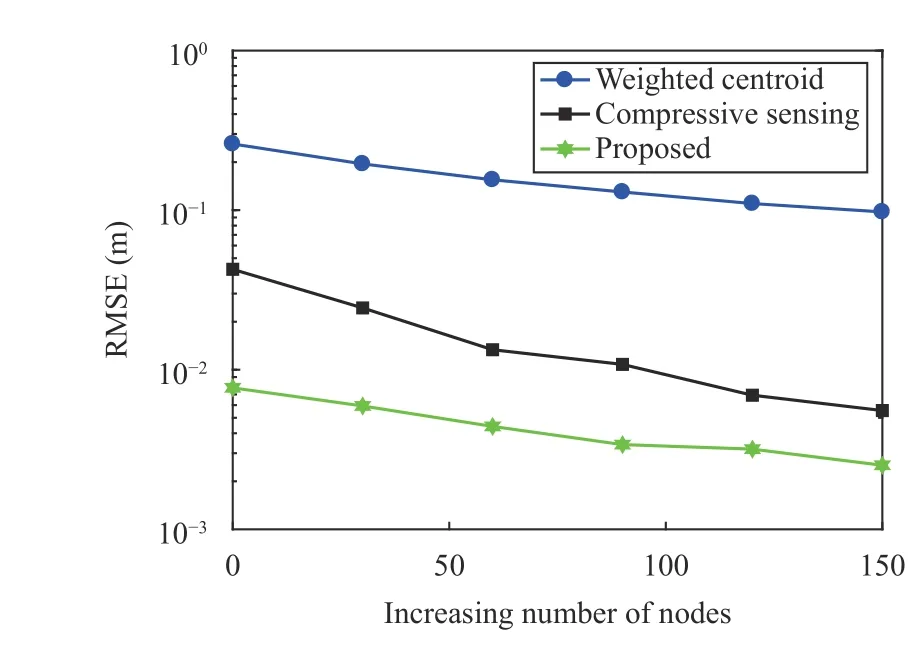
Fig.6.RMSE vs.increasing number of nodes.
For performance evaluation of the proposed hybrid technique in accordance with the number of anchor nodes,we have considered 96 sensor nodes and 4 anchor nodes in the same 100 m × 100 m × 100 m cubic area.It can be observed from Fig.7,that if the anchor nodes are increased up to 15,the hybrid IoUT network gets saturated.No further increment in number of anchor nodes enhances the network localization capability,and hence,no improvement in RMSE.Therefore,it is important to model these parameters in a much more accurate way for the practical deployment of Hybrid-IoUT network.
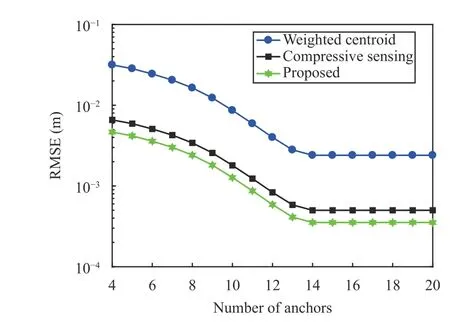
Fig.7.RMSE vs.increasing number of anchors.
D.RMSE vs.Transmission Range
We performed simulations to look for the relationship between RMSE and transmission range for the scenario of 100 nodes (96 sensor nodes and 4 relay nodes) deployed in a 100 m × 100 m × 100 m cubic area.The noise variance is 0.1 m when anchor nodes are four.Fig.8 shows that the RMSE decreases with an increase in transmission rangeR.As the node’s transmission range increases,the network’s average connectivity increases and decreases RMSE up to a particular value,after which it saturates.For example,we can see that RMSE decreases with an increase in the transmission range up to 7 m,after which it almost saturates,and further increase in transmission range will only increase the energy consumption.Fig.8 also illustrates that the proposed approach outperforms WCL [55] and compressive sensing because both WCL and compressive sensing consider a fully connected network where an increase in the transmission range does not improve the localization accuracy.
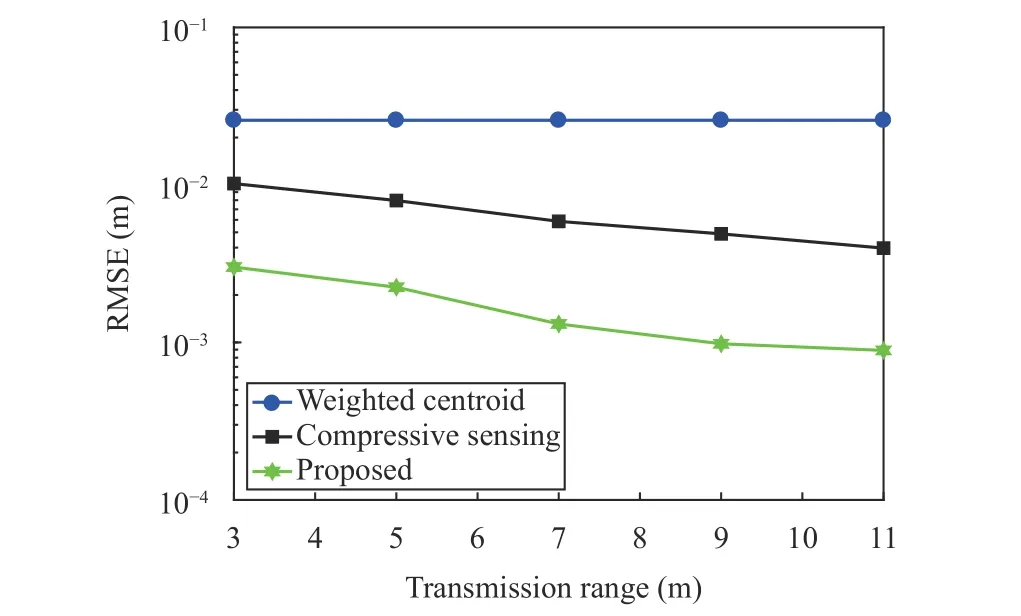
Fig.8.RMSE vs.transmission range.
Fig.8 shows only the impact of transmission range on the localization accuracy; we further evaluate the energy error product as a function of the transmission range.For this,we consider three different scenarios with 50,100,and 200 IoUT nodes in 100 m × 100 m × 100 m cubic area.Fig.9 shows that the energy error product depends on both the number of nodes and the transmission range.For a dense network such as 200 nodes,the optimal transmission range with minimum energy error product is towards the lower end,i.e.,4 m.For a sparse network,the minimum energy error product is around 8 m.This is because increasing the transmission range improves the accuracy up to a specific value,after which the saturation occurs,and a further increase in range will only result in high energy consumption.Fig.9 show that a larger transmission range reduces the localization error but leads to increased energy consumption.Hence,it is crucial to select a proper transmission range for IoUT nodes to maintain energy efficiency.Besides optimizing the above function,energyharvesting techniques have recently attracted the researchers for improving the network lifetime of underwater communications systems [17].As the underwater nodes cannot sustain on battery-operation for larger time,thus,energy harvesting methods such as microbial fuel cells [56]and acoustic piezo-electric harvesters [57] can be promising unfoldings.
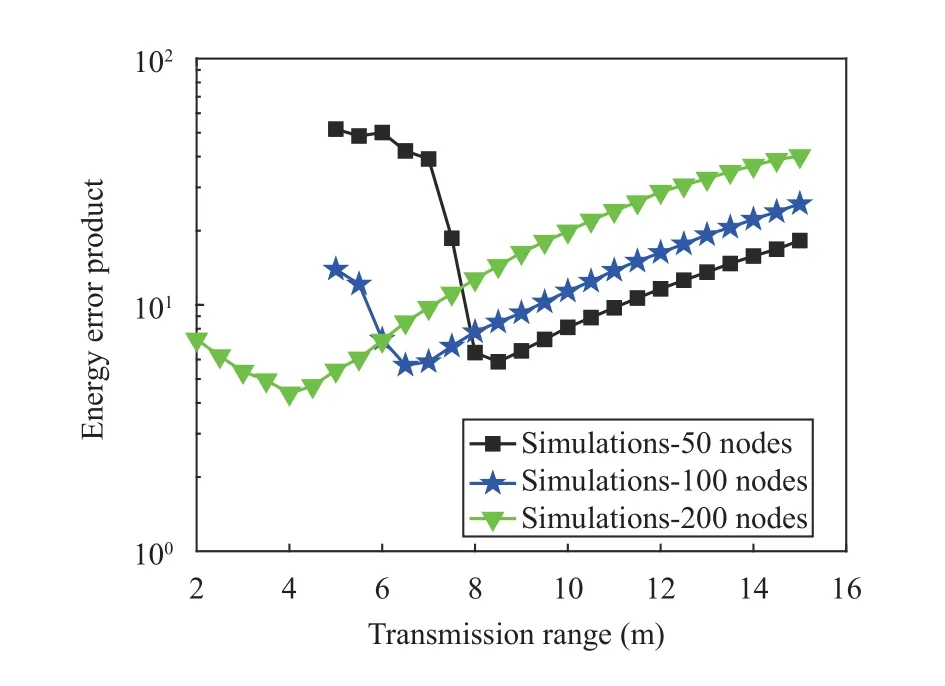
Fig.9.Energy error product vs.transmission range.
VII.CONCLUSION
This paper introduces a hybrid MIAO ranging technique that utilizes SOA approach for accurate localization.Based on the SOA method,nearest-neighbour distances are measured.This method leads to better localization accuracy than a standalone single underwater communication technology due to the availability of many single-hop ranges in IoUT networks.Moreover,Bayesian MDS is introduced to calculate the network graph from the computed single-hop distances.The output graph from the BMDS is fed to the Procrustes analysis technique to estimate the underwater IoUT devices’ unknown location accurately.Furthermore,the H-(CRLB) is derived for analyzing the performance of the proposed method.Simulations are performed for sparse and dense IoUT networks to see the effectiveness of the proposed scheme.The results show the superior performance of the proposed method with respect to the literature in terms of different system parameters,such as ranging error variance,network density,and the total number of anchors.The simulation results depict that the proposed MIAO scheme achieves a sub-meter level of accuracy in even sparse IoUT networks.
In future work,we will perform in-situ measurements in a real underwater setup and compare the simulation and practical results both in terms of computational complexity,energy efficiency,and error performance.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Deep Learning Based Attack Detection for Cyber-Physical System Cybersecurity: A Survey
- Sliding Mode Control in Power Converters and Drives: A Review
- Cyber Security Intrusion Detection for Agriculture 4.0: Machine Learning-Based Solutions,Datasets,and Future Directions
- Barrier-Certified Learning-Enabled Safe Control Design for Systems Operating in Uncertain Environments
- Cubature Kalman Filter Under Minimum Error Entropy With Fiducial Points for INS/GPS Integration
- Conflict-Aware Safe Reinforcement Learning:A Meta-Cognitive Learning Framework