基于TS 模糊神经网络的液压伺服系统研究*
2022-01-26张永贤陈杨谨瑜邰万文
张永贤,李 伟,陈杨谨瑜,邰万文
(华东交通大学电气与自动化工程学院,南昌 330013)
0 引言
在飞机燃油系统研发试验中,考虑到整个系统的复杂性,并且出于安全考虑,不可能将所有试验都在飞机上进行。因此,在飞机燃油测试系统中,地面模拟试验台发挥了重要作用[1-2]。在模拟试验中,液压伺服系统由于具备控制方便,能够实现高速、大驱动力的特点通常被用来为燃油试验台的转动提供驱动力。但是伺服系统存在很强的非线性,传统PID 难以使系统达到精确的控制[3-5],这就可能导致伺服系统中的液压马达不能够精准、实时地调节各种工况下飞机的转台角度[6]。因此,对于整个伺服系统来说,控制器的研究有着重要的意义。
目前,控制算法的研究依然还是控制领域的关键,且倾向于智能化控制。对PID 控制器而言,单一算法的整定已无法满足复杂系统的需求,同时参数调整的方式也在不断优化,因此,多种算法结合的趋势已是必然。比如使用遗传算法结合BP 神经网络的方法[7],粒子群结合模糊控制优化的方法等多种算法融合的PID 参数整定方法[8]。改进的PID 控制器在伺服系统中被广泛应用,但是在应用中也各有利弊,比如文献[9-10]对于伺服系统均利用遗传算法对PID 参数进行了整定,并且实现了快速寻优,但是遗传算法需要繁琐的编码和解码,文献[11]将蜂群算法引入粒子群算法进而应用于飞机舵机中的电液伺服系统中,虽提升了系统的精度和稳定性,但是系统性能评价指标的选取较为困难。文献[12]将线性二次型算法应用于伺服系统中,但是忽略了伺服系统的非线性,文献[13]中利用模糊控制对飞机流量压力系统进行控制,但是简单的模糊控制存在着控制精度差,系统动态效果差的缺点。
考虑到模糊控制需要靠积累的专家经验,且学习能力差,规则复杂等,本文结合神经网络的自学习和自组织能力[14],基于TS 模糊模型并结合常规PID,设计了一种基于TS 模糊模型的智能控制器——TS 模糊神经网络PID 控制器,该控制器同时具备模糊控制和神经网络PID 控制的优点。根据飞机台架控制伺服系统的工作原理建立数学模型,将该智能控制器加入到伺服系统中,根据系统的输入输出设置相应的模糊规则,再结合神经网络对PID参数进行在线整定,实现对PID 参数的寻优。仿真实验和对比分析证明,该新型智能控制算法对飞机液压伺服系统具有较好的控制效果,对于控制精度也有明显提高。
1 飞机液压伺服系统数学模型
1.1 系统工作原理
本文研究的电液伺服系统是伺服比例阀对液压马达进行控制的伺服控制系统,该系统主要包括控制器、伺服比例阀和液压马达。工作时,计算机控制器将传感器输出的角度反馈信号与控制的角度值进行比较,输出信号经PID 控制器调节后驱动电液伺服比例阀工作,伺服比例阀根据给定电信号大小来调节阀口开度实现自身流通量的控制,进而控制液压马达的转动角度[15-16],在整个调节系统中,PID 控制器发挥着重要作用。
1.2 伺服系统比例环节数学模型
建立比例放大器和比例电磁铁的数学模型如式(1)和式(2)所示。

式中,Ka、I(s)、U(s)分别为比例放大器的增益、输出电流和输入电压。Ke和Fe(s)为比例电磁铁的增益系数和对阀芯的作用力。
1.3 伺服比例阀数学模型
伺服比例阀是液压伺服系统中的重要组成部分,它通过主阀芯在阀套内的运动控制阀口开度控制流量来驱动液压马达工作,对伺服比例阀的先导阀进行受力分析,先导滑阀的力平衡关系式如式(3)所示。

式中,Bv2为阀芯与阀套的等效阻尼系数,Kvs2为阀芯与反馈弹簧之间的等效刚度系数,mv2为先导阀芯质量。
当先导滑阀阀芯受力时,它的位移输出如式(4)所示。

先导滑阀的线性化伺服关系满足式(5)。
伺服活塞流量连续方程如式(6)所示。

式中,A1为液压系统伺服缸内伺服活塞面积,Vt2为液压缸的等效容积,xt2为活塞位移,Cip为液压系统的内泄漏系数,Ey为等效容积弹性模数。
主阀芯力平衡方程如式(7)所示。

式中,AA为主阀芯回油口的有效面积,PB为进油口油压,AB为主阀芯进油口的有效面积,PA为出油口油压,PC为上腔油压,B3为等效阻尼系数,m3为主阀芯质量,K3为主阀芯等效刚度系数。
对式(3)~式(7)进行整理,得到主阀芯位移关系式如式(8)所示。

1.4 液压马达数学模型
液压马达流量连续方程表达式如式(9)所示。

式中,Dm为液压马达排量,θ 为液压马达转角,Ctm为马达总泄漏系数。
液压马达的力矩平衡方程如式(10)所示。

式中,Jt为马达与负载折算到马达轴上总的转动惯量,Bm为活塞与负载运动的粘性阻尼系数,Gt为负载扭转弹簧刚度,TL为作用于马达轴上的负载干扰力矩。
对式(9)和式(10)进行整理,消去中间变量得到液压马达简化传递函数如式(11)所示。
液压马达传递函数系统图如图1 所示。
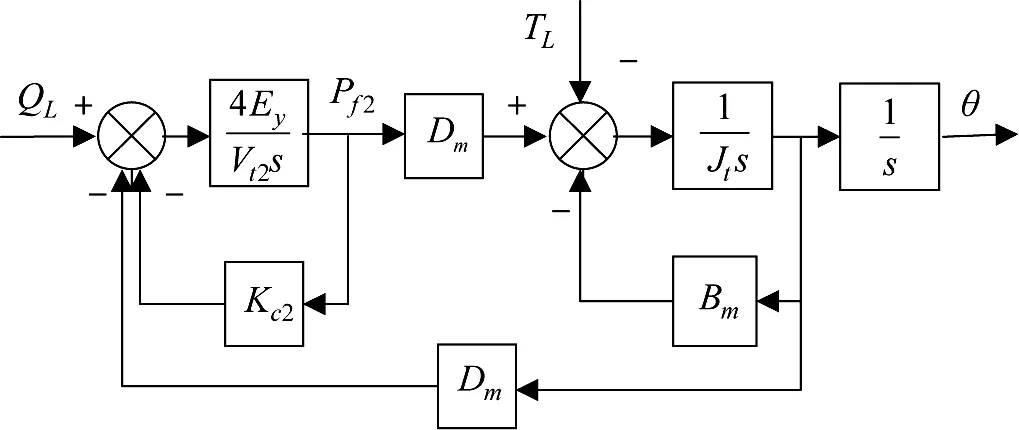
图1 液压马达结构方框图
2 控制器设计
TS 模糊模型由Takagi 和Sugeno 两位学者在1985 年提出,它是一种基于If-Then 模糊规则的对非线性系统进行分析的有效方法。TS 模糊模型的特殊之处是控制规则分为前件和后件,其中前者采用模糊量形式,后者采用精确量的线性组合形式[17]。TS 模糊模型除了适合复杂系统的识别和建模外,还普遍用于控制领域[18-20]。它在分段线性模型的基础上,与PID 控制算法结合使用能够实现局部线性对全局非线性的控制。TS 型模糊PID 控制器既克服了传统PID 控制器对复杂系统控制性能弱、精度低的缺点,也使传统PID 控制器控制方式简单的优点得到很好的保留。
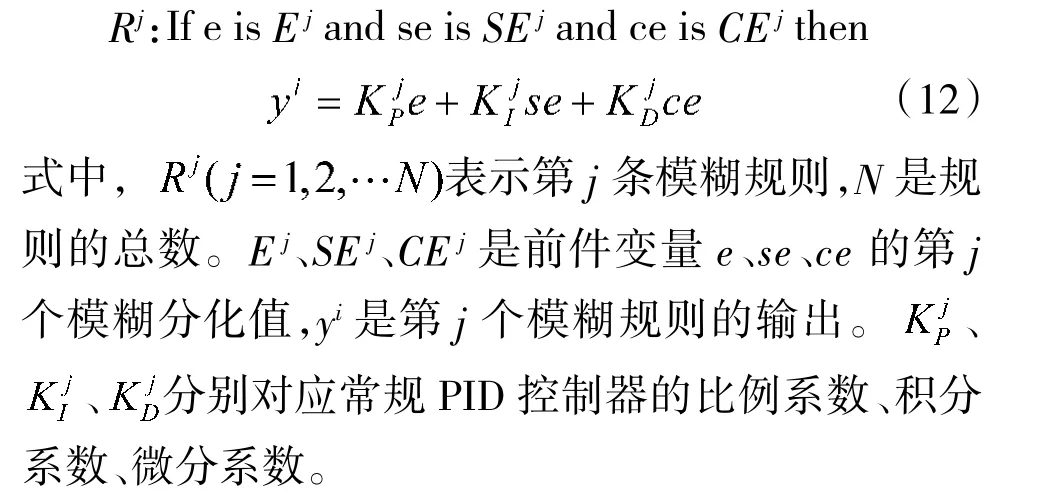
在TS 模型中,模糊规则的前件变量为输出误差e,误差积累量se 和误差变化量ce,为了简化模糊规则,再将它的结果以位置式PID 控制的形式输出,于是TS 模糊PID 控制器可以由一系列类似PID 控制器的模糊规则实现。它的第j 条规则可以表示为式(12)。
2.1 TS 模糊神经网络PID 控制器的结构
为了实现参数辨识和在线调整,将神经网络技术引入TS 模糊PID 控制器中[21-22],形成MISO 的TS 模糊神经网络PID 控制器,如图2 所示,该网络由5 层组成。
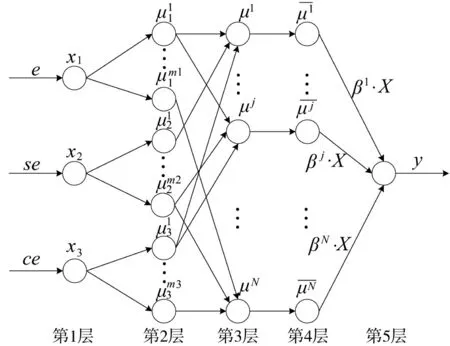
图2 TS 模糊神经网络PID 控制器结构图
第1 层为输入层。3 个节点xi(i=1,2,3)与e,se,ce 相连,e,se,ce 的作用是将输入值传递到下一层。
第2 层为输入空间分区层。这一层的功能是计算属于模糊子集的输入组件x(ii=1,2,3)的隶属函数值,如果高斯钟形函数作为隶属函数,那么与xi相连的第j 个的输出节点如式(13)所示。

式中,cij和σij分别表示隶属函数的中心值和宽度。
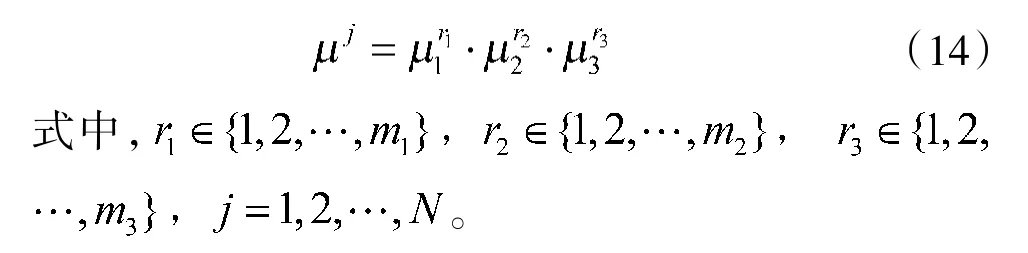
第3 层为模糊推理层。每个节点代表一个模糊规则,其功能是对模糊规则进行匹配并使用式(14)计算每个规则的适用度。
第4 层是归一化层。节点数与第3 层相同,该层的功能是完成归一化计算,该层第j 个节点的输出如式(15)所示。

第5 层为输出层。其功能是计算产生的每条规则,完成模糊规则空间到输出空间的映射。该层的输出是所有规则的加权和,其计算式如式(16)所示。

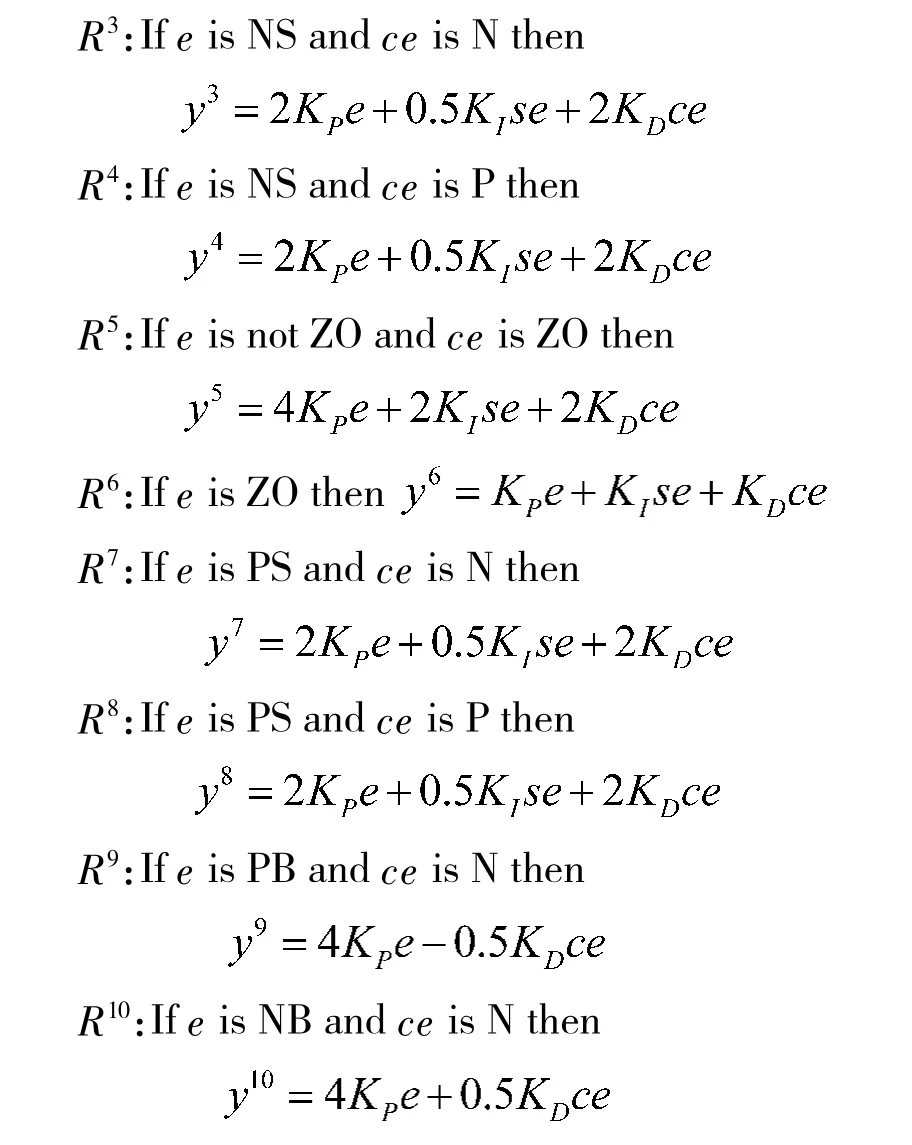
2.2 模糊规则的确定
根据PID 参数调整的指导原则和模拟经验,在不失一般性的前提下,可以制定出一系列TS 模糊控制规则:

3 仿真结果及分析
根据上述提出的TS 模糊神经网络PID 控制方法,在Simulink 环境下搭建系统的整体仿真模型,如图3 所示。

图3 系统整体仿真图
在图3 所示的整体系统模型中,给定系统阶跃信号,以误差e,误差变化量ce 和误差累积量se 作为输入,液压马达转角θ 作为输出。TS 模糊神经网络PID 控制器的初始参数根据神经网络的自学习能力来确定。由试验分析得出,当学习率η=0.02时,TS 模糊神经网络模型的参数为最优值。
3.1 阶跃响应测试仿真
以阶跃信号作为系统的输入,分析系统在TS模糊神经网络PID 控制下的响应性能,同时对比在常规PID 控制和基本模糊控制下系统的控制效果,对比结果如图4 所示。
根据图4 的仿真结果,在控制效果上模糊PID控制和传统PID 控制的超调量相对较大,同时达到稳态的时间相对较长,相比于这两者,由TS 模糊神经网络整定的PID 控制器超调量大幅度减少,响应时间相对于没有经神经网络整定的TS 模糊控制也相对减少,而且稳定时间大幅度缩短。
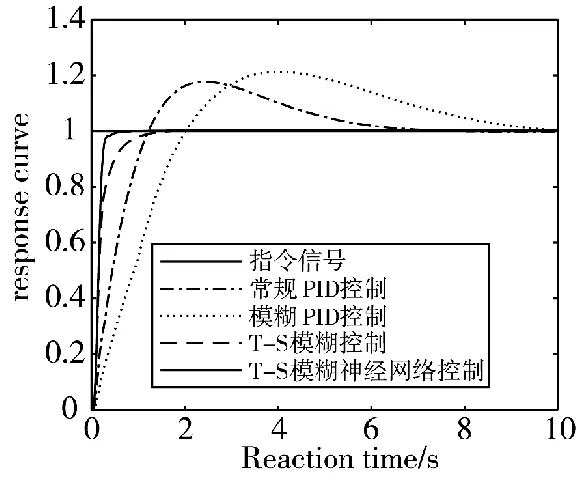
图4 系统阶跃响应曲线
为了检测系统整体的抗干扰能力,在5 s 处加一个干扰信号,各控制算法对比仿真结果如下页图5所示。
图5 的仿真结果表明,在外界信号的干扰下,模糊控制不能在短时间内达到稳定并产生了大幅度的震荡。可见模糊控制根据专家经验很难对系统干扰作出迅速整定,相比之下,TS 模糊神经网络能迅速调节到稳定状态,显示了其良好的抗干扰能力和良好的鲁棒性。
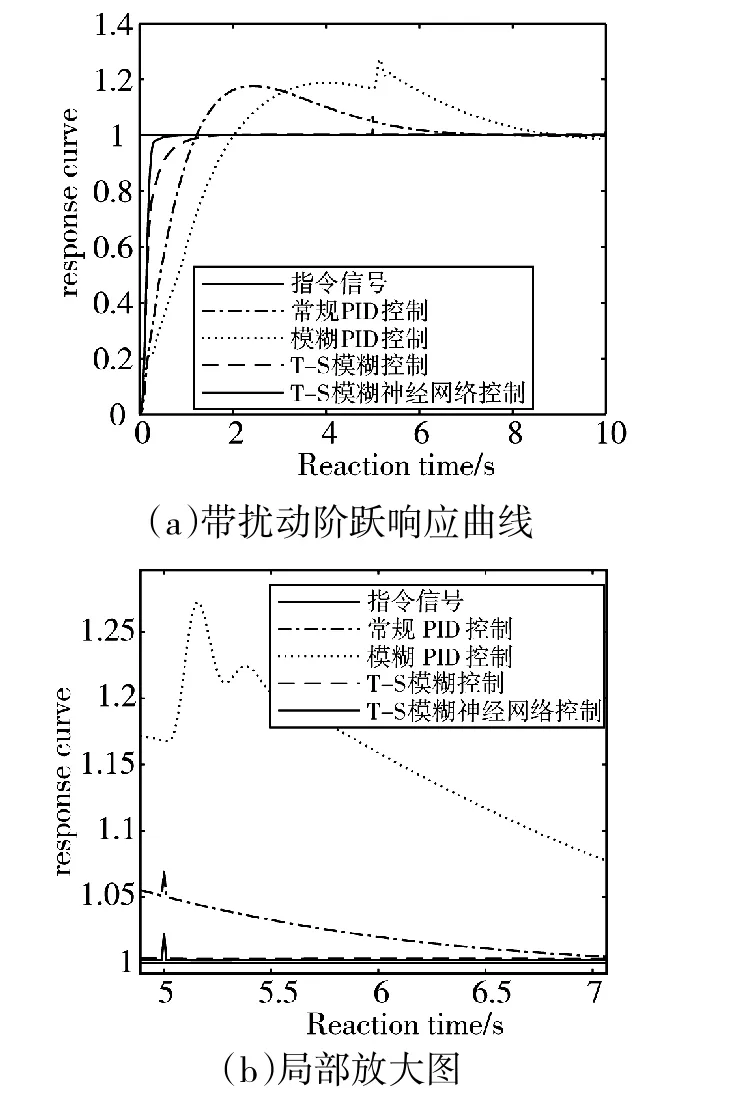
图5 带扰动系统响应曲线
3.2 正弦信号测试仿真
对系统进行正弦跟踪效果测试,将正弦信号作为输入给定系统,将三者控制器的控制曲线进行对比,分析控制效果对比图,如图6 所示。
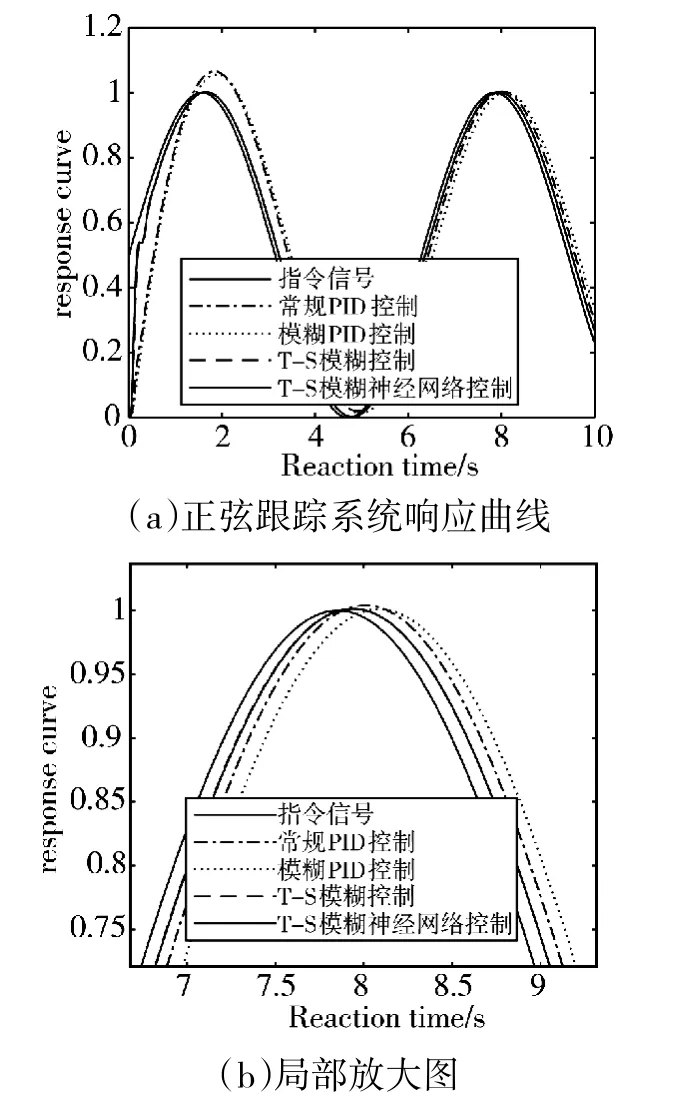
图6 正弦跟踪响应曲线
根据图6 可知,在正弦信号输入情况下,3 种算法基本都能达到稳定的跟踪效果,但是从局部放大图可以看出,模糊PID 和传统PID 存在着严重的跟踪滞后,而TS 模糊神经网络因为相比于TS 模糊控制有着自学习自组织能力,跟踪效果明显强于其他,呈现出较好的控制效果。
通过上述阶跃响应和正弦输入仿真对比结果图可知,本文提出的TS 模糊神经网络PID 智能控制器的控制性能明显优于传统PID 和普通模糊控制,其响应速度更快,稳定性能更佳,控制精度更高,并且也有良好的抗干扰能力。凸显出了该控制器控制性能的优越性。
4 结论
本文通过使用结合TS 模糊和神经网络算法的PID 控制器,对飞机地面模拟试验台液压伺服控制系统进行了仿真研究,得到结论如下:
1)通过用模糊神经网络对伺服系统中的PID参数进行寻优,实现了对3 个参数的自适应整定。与传统PID 和普通模糊控制相比,该控制器较好地解决了在伺服系统控制中快速性和稳定性之间的矛盾,具有较强的控制性能。
2)TS 模糊神经网络PID 控制器完美地结合了模糊控制的推理归纳能力和神经网络的自学习、自适应能力,可以极大提高系统的动态和稳定性能。
3)该控制器能够有效地抵抗外界干扰,消除系统震荡,对于飞机台架伺服控制系统呈现出显著的调节效果,有效地降低了系统的控制误差,大大提高了跟踪能力和抗干扰能力。为伺服系统控制策略的设计提供了一种新的参考。
