含有恰约束分支的无耦合两转动并联机构型综合
2022-01-24张彦斌王科明芦风林魏雪敏王科峰
张彦斌 王科明 芦风林 魏雪敏 王科峰
1.河南科技大学机电工程学院,洛阳,4710032.机械装备先进制造河南省协同创新中心,洛阳,471003
0 引言
在医疗康复、航空航天等应用领域,含有两个转动自由度(2R型)的机构常作为执行机构用于姿态调整。并联机构具有精度高、结构紧凑、响应快等优点,故2R型并联机构适合作为姿态调整装置的本体结构[1-4]。国内外学者对两转动并联机构进行了诸多研究和分析。侯雨雷等[5]提出一种新型RU-RPR两转动解耦并联机构,讨论了机构的位置正反解和奇异性。CARRICATO[6]设计出一类分支含有等速比关节的2R和3R型的解耦并联机构。范彩霞等[7]提出了一种完全解耦的二自由度转动并联机构,并进行了运动学和奇异性分析。张彦斌等[8]设计出一种适用于踝关节康复机器人的2R型RR-RURU并联机构,并对其运动学和完全各向同性条件进行了分析。GOGU[9]基于线性变换理论提出了一种完全各向同性的过约束2R型并联机构综合方法。XU等[10]通过分析施加到动平台上的分支约束力的空间排列关系,设计出一类具有2个连续转轴的2R并联机构。ZENG等[11]基于约束螺旋理论,建立一种转动解耦并联机构的综合方法,并得到一类两转动并联机构。SYRSELOUDIS等[12]提出一种可作为人体踝关节康复装置的新型混联二自由度转动机构,并对其进行参数优化和传递性能分析。
目前,普通并联机构的分支运动链数等于其自由度数,主动副平均分配在各条分支中,即每一条分支运动链均为主动分支[13-15]。某些分支运动链数大于机构自由度数的并联机构至少有一个分支不含主动副,该类分支仅向机构动平台提供约束而不提供驱动力,称其为纯约束分支。纯约束分支末端构件的运动输出特性与机构动平台的运动输出特性完全相同时,该约束分支称为恰约束分支[16-17]。文献[18-19]指出,与不含恰约束分支的并联机构相比,恰约束分支可对并联机构的静刚度产生显著影响,提高整机的稳定性与承载能力。不仅如此,恰约束分支还能提高并联机构的精度、控制不可控误差[20]。KONG[21]设计出一种可作为仿生机器人腕关节和髋关节的两自由度球面RR-RRR-RRR并联机构,其中的RR分支运动链为恰约束分支。
本文基于驱动力螺旋理论提出一种含有恰约束分支的无耦合两转动并联机构的构型综合方法,并利用该方法完成机构的型综合,进而得到多种新型并联机构。
1 无耦合两转动并联机构输出运动解耦性与分支驱动力之间的关系
本文所提出的两转动并联机构包含2条主动分支和1条恰约束分支,2条主动分支分别向机构动平台提供一个驱动力,恰约束分支仅提供约束。并联机构的运动输出特性包括自由度的数目和类型,且由所有机构分支运动链的结构形式与配置方位共同决定。无耦合并联机构的输出运动特性不仅与上述因素有关,还与主动分支施加到动平台的驱动力类型及其相互耦合关系有关。
对于含有恰约束分支的无耦合两转动并联机构,假定恰约束分支由轴线垂直相交的2个转动副R1和R2构成,转动副R1固定在静平台上,转动副R2与动平台直接相连,如图1所示。若第一、第二主动分支分别独立控制动平台绕R1和R2轴线的转动自由度,那么2条主动分支对动平台提供的驱动力螺旋与动平台的2个运动螺旋应满足如下关系:
(1)
e,i,j=1,2且i=e;i≠j
式中,$ai为第i条主动分支向动平台提供的驱动力螺旋;$e、$j分别为动平台的第e和第j个转动螺旋,即恰约束分支中第e和第j转动副对应的运动螺旋;“∘”为旋量互易积符号。
式(1)表明,为使机构具有无耦合运动输出特性,2条主动分支的驱动力螺旋分别对动平台的1个运动螺旋做功,对另一个运动螺旋不做功。
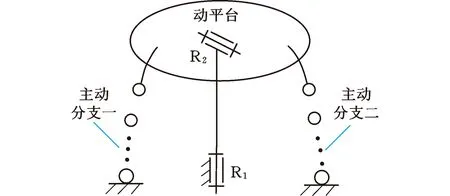
图1 含有恰约束分支的两转动并联机构Fig.1 Two-rotational parallel mechanism with onepure constraint branch

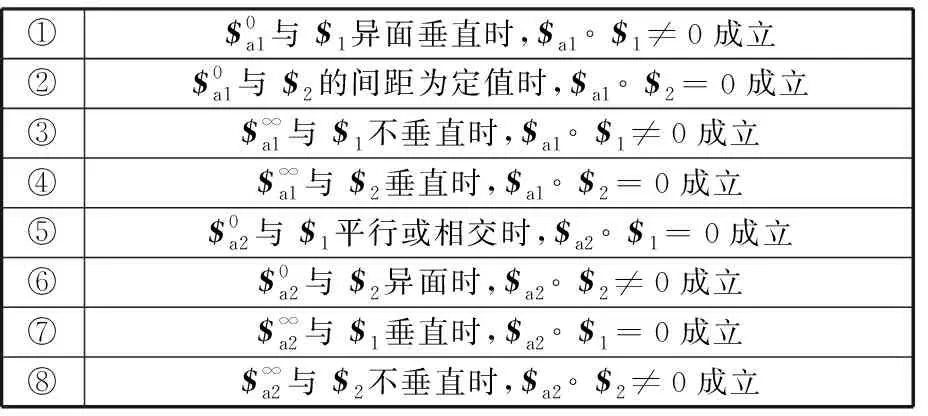
表1 分支驱动力螺旋与动平台运动螺旋之间的关系

因此,为使机构具有无耦合的运动特性,分支驱动力螺旋应满足如下条件:①第一条主动分支的驱动力螺旋为线力矢时,它需与运动螺旋$1异面且同时与运动螺旋$2轴的间距为定值(间距为0时,恰好与$2相交);②第一条主动分支的驱动力为偶力矢时,它应与运动螺旋$2垂直,且不能垂直于运动螺旋$1;③第二条主动分支的驱动力螺旋只能为线力矢,它与运动螺旋$2异面且平行于运动螺旋$1。机构2条分支驱动力螺旋的作用形式如图2所示。
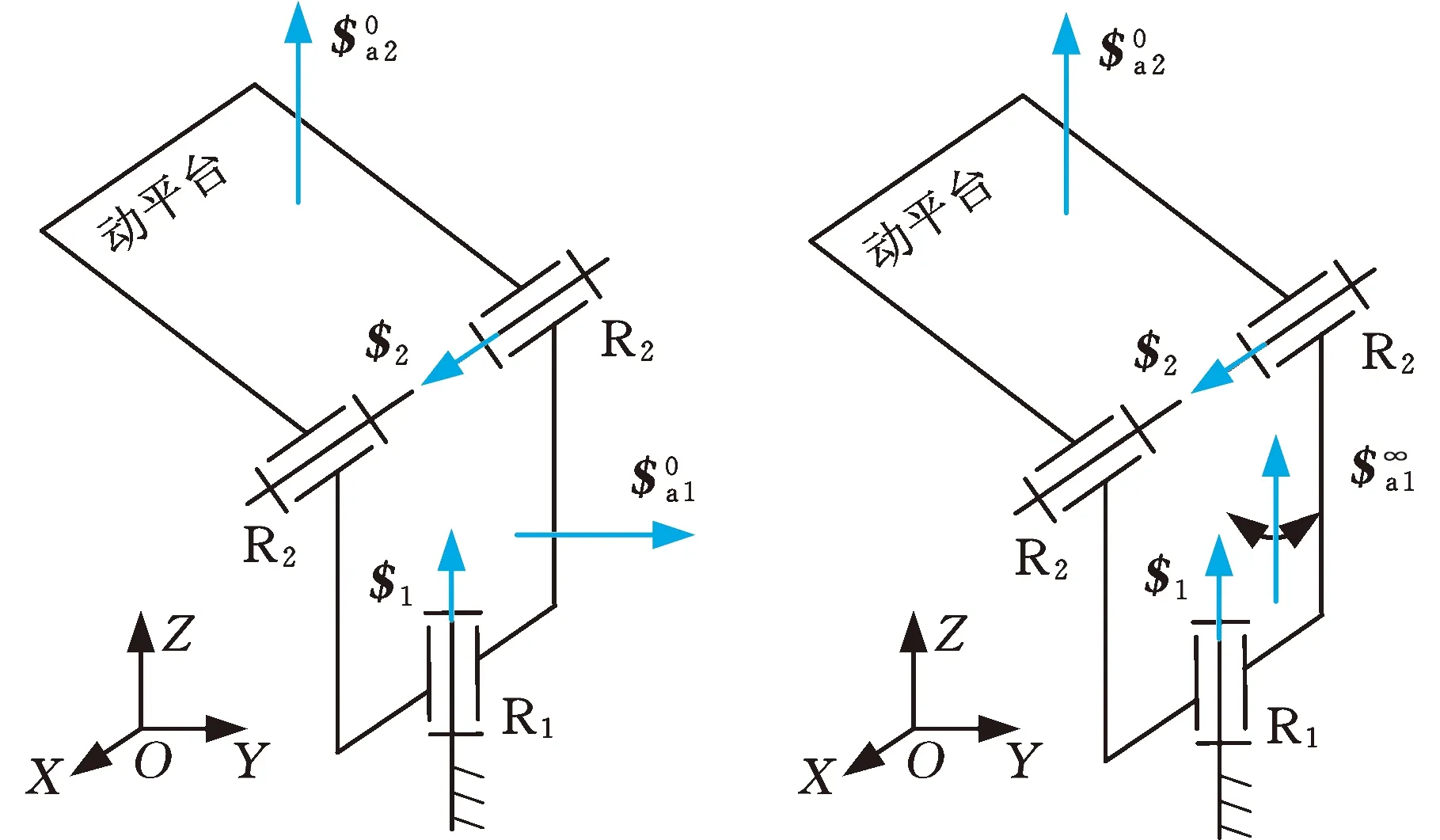
(a)$a1、$a2为线力矢 (b)$a1为偶力矢、$a2为线力矢图2 分支驱动力螺旋的作用形式Fig.2 Action forms of branch wrench force screws
2 机构输入与输出运动之间的映射关系
并联机构动平台的运动由各个分支的末端运动共同决定,且每条分支的末端运动可用该分支的运动螺旋系的线性组合表示:
(2)
$ji=(sji;s0ji)sji=(Lji,Mji,Nji)
s0ji=(Pji,Qji,Rji)

为推导出机构输入-输出运动之间的关系,可将第i条分支的驱动力螺旋$ai与式(2)等号两边作互易积,然后整理成矢量方程,得
(3)
$ai=(sai;s0ai)sai=(Lai,Mai,Nai)
s0ai=(Pai,Qai,Rai)
本文提出的含有恰约束无耦合两转动并联机构仅有2条主动分支(n=2),为降低机构的运动惯性,假定所有主动副均为直接安装于静平台上,即主动分支中的第一个运动副为主动副,那么根据式(3)可得机构的速度方程:
(4)
机构仅具有2个转动自由度,故其线速度为零,即v=0。假定机构动平台具有分别绕Z轴(转动副R1的轴线)和X轴(转动副R2的轴线)的转动自由度,那么绕Y轴的角速度为0。在图2所示的坐标系OXYZ下,动平台第一运动螺旋$1的单位方向矢量记为S1=(0,0,1),第二运动螺旋$2的单位方向矢量为S2=(l,m,0)。将式(4)中动平台输出速度分量为零的元素以及驱动力螺旋中与之相对应的元素消去后,式(4)可改写成如下形式:
(5)

第一条主动分支施加到动平台的驱动力螺旋$a1为线力矢时,令gi=$ai∘$1i,若gi≠0,则式(5)可改写为
(6)
Bai=Pail+Qaim
当第一条主动分支的驱动力螺旋为偶力矢时,式(5)则改写为
(7)
Ka1=La1l+Ma1m
对于无耦合的两转动并联机构,因其输入-输出速度之间具有一一对应的线性映射关系,故机构的速度雅可比矩阵必为对角阵。因此,根据式(6)、式(7)可写出机构输入-输出运动之间的统一表达式:
(8)
其中,元素ζ1有2个值,ζ1=Ra1/g1对应驱动力螺旋$a1为线力矢,ζ1=Na1/g1对应驱动力螺旋$a1为偶力矢;元素ζ2=Ba2/g2。
3 主动分支的构型综合
3.1 第一条主动分支的构型综合
3.1.1驱动力螺旋$a1为线力矢
根据式(6)、式(8),当机构具有无耦合运动传递特性时,必满足条件ζ1≠0,Ba1=0和g1≠0。由ζ1=Ra1/g1≠0可得Ra1≠0;由Ba1=0可得Pa1l+Qa1m=0。机构处于一般位形时,元素l和m均不为零,所以必有Pa1=Qa1=0。
根据表1中条件①,只要驱动力螺旋$a1垂直于R1轴线(Z轴),就能实现驱动力$a1对机构绕R1轴线转动的控制,即满足方程$a1∘$1≠0。因此,可取La1=1,Ma1=0。此时驱动力螺旋$a1的形式为
(9)
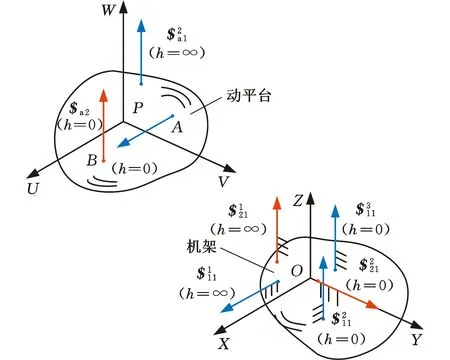
图3 分支驱动力螺旋与主动运动螺旋Fig.3 Actuation wrench screws and actuation twistscrews of mechanism branches
g1≠0时,有
g1=$a1∘$11≠0
(10)
其中,$11为第一条主动分支的主动螺旋,它可能为无穷大节距螺旋$11=(0,0,0;L11,M11,N11)或零节距螺旋$11=(L11,M11,N11;P11,Q11,R11)。

g1=L11
(11)
即g1仅与主动螺旋$11的方向矢量在X轴的分量L11有关,而与另外两坐标轴的分量无关,故可取L11=1,M11=N11=0。因此,第一条主动分支的主动螺旋的形式可为
(12)
所以第一条主动分支的主动螺旋为平行于X轴的无穷大节距螺旋,即该分支的主动副可选为沿X轴方向的移动副,如图3所示。
(2)$11为零节距螺旋时,将$a1和$11代入式(10),得
g1=P11-N11ya1
(13)
即g1取决于$11的方向矢量的Z轴分量N11和其对偶量的Y轴分量P11,而与$11的其他分量无关,故可取L11=M11=Q11=R11=0。因坐标参数ya1为变量,为避免出现g1=0的情况,只能取N11=1,P11=0。从而确定出主动螺旋$11的另一种形式:
(14)
式(14)表明,主动螺旋$11也可为平行于Z轴的零节距螺旋,即该分支主动副可为轴线平行于Z轴的转动副,如图3所示。
3.1.2驱动力螺旋$a1为偶力矢
令$a1=(0,0,0;La1,Ma1,Na1),由于式(7)中的速度雅可比矩阵必为对角阵,因此可得Na1≠0,La1=Ma1=0,从而确定$a1的第二种形式:
(15)
可知该驱动力螺旋为平行于Z轴的无穷大节距螺旋,如图3所示。

g1=$a1∘$11=N11
(16)
由式(16)可知,g1仅与主动螺旋$11的方向矢量在Z轴方向分量N11相关,而与其他元素无关,故可取N11=1,L11=M11=0。$11直接与静平台相连,可令其轴线通过定坐标系原点,即有P11=Q11=R11=0,从而确定出该分支主动螺旋的第三种形式
(17)
分支驱动力螺旋和主动螺旋确定后,根据分支驱动力螺旋与同一分支中除主动螺旋外的所有非主动运动螺旋互易积为零的特性,以及运动螺旋间的线性相关性,可确定出所有非主动螺旋的可能类型和数量,具体如下:
类型Ⅰ$a1、$11分别为零节距螺旋和无穷大节距螺旋
Ⅰ-1 轴线平行于X轴的零节距螺旋最多有3个,当其数量为2或3时,该类螺旋所组成的螺旋系中不能再插入其他零节距螺旋。
Ⅰ-2 轴线平行于Y轴的零节距螺旋(惰性螺旋)最多有1个。
Ⅰ-3 轴线垂直于X轴的无穷大节距螺旋最多有2个,且当其数量为2时,2个螺旋的轴线不能平行。
Ⅰ-4 轴线平行于Z轴的零节距螺旋有且仅有1个,该螺旋与驱动力螺旋$a1相交,直接与动平台相连。
类型Ⅱ$a1和$11均为零节距螺旋
Ⅱ-1 轴线平行于X轴的零节距螺旋最多有3个。
Ⅱ-2 轴线平行于Z轴的零节距螺旋有且仅有1个,并直接与主动运动螺旋相连。
Ⅱ-3 轴线垂直于X轴的无穷大节距螺旋最多有2个,且当其数量为2时,2个螺旋的轴线不能平行。
Ⅱ-4 轴线与驱动力螺旋$a1相交且平行于Y轴的零节距螺旋(惰性螺旋)最多有1个。
类型Ⅲ$a1和$11分别为无穷大节距螺旋和零节距螺旋
Ⅲ-1 轴线平行于X轴的零节距螺旋最多有3个。
Ⅲ-2 轴线平行于Y轴的零节距螺旋最多有3个。
Ⅲ-3 轴线垂直于Z轴的无穷大节距螺旋最多有2个,且当其数量为2时,2个螺旋不能相互平行。
至此,得到了第一条主动分支所有可能的主动螺旋形式,以及与之对应的可行非主动螺旋的形式。然后,根据分支运动链连接度的不同,组合主动螺旋与非主动螺旋,可得到第一条主动分支的可行结构类型,其中基本运动链类型有9种,如2P1R、2P3R、2P4R、1P5R和6R等。利用多自由度运动副替换基本运动链中的单自由度运动副,可得到含有C副、U副和S副的多自由度运动副分支运动链。表2分别、表3分别给出了不同驱动力螺旋形式下第一条主动分支的结构形式,运动副字母下标x、y和z表示机构初始位形时运动副的轴线方向。运动链中,下标两相邻大写字母相同表示两个运动副轴线平行,否则表示运动副轴线垂直。分支的连接度较小会造成机构的约束增多,从而增大机构的装配难度,因此,可在连接度较小的结构中增加1个或2个转动副作为惰性副,分别用B和B来表示(B代表运动副U、S、C)。下标为n的P副的轴线垂直于相邻两转动副轴线。若分支的第一个运动副为C副,则C的上标r和t分别表示选择C副的主动输入为转动或移动;若第一个运动副为U副,则U的上标x和y分别表示选择U副的主动输入为沿X轴和Y轴的转动。
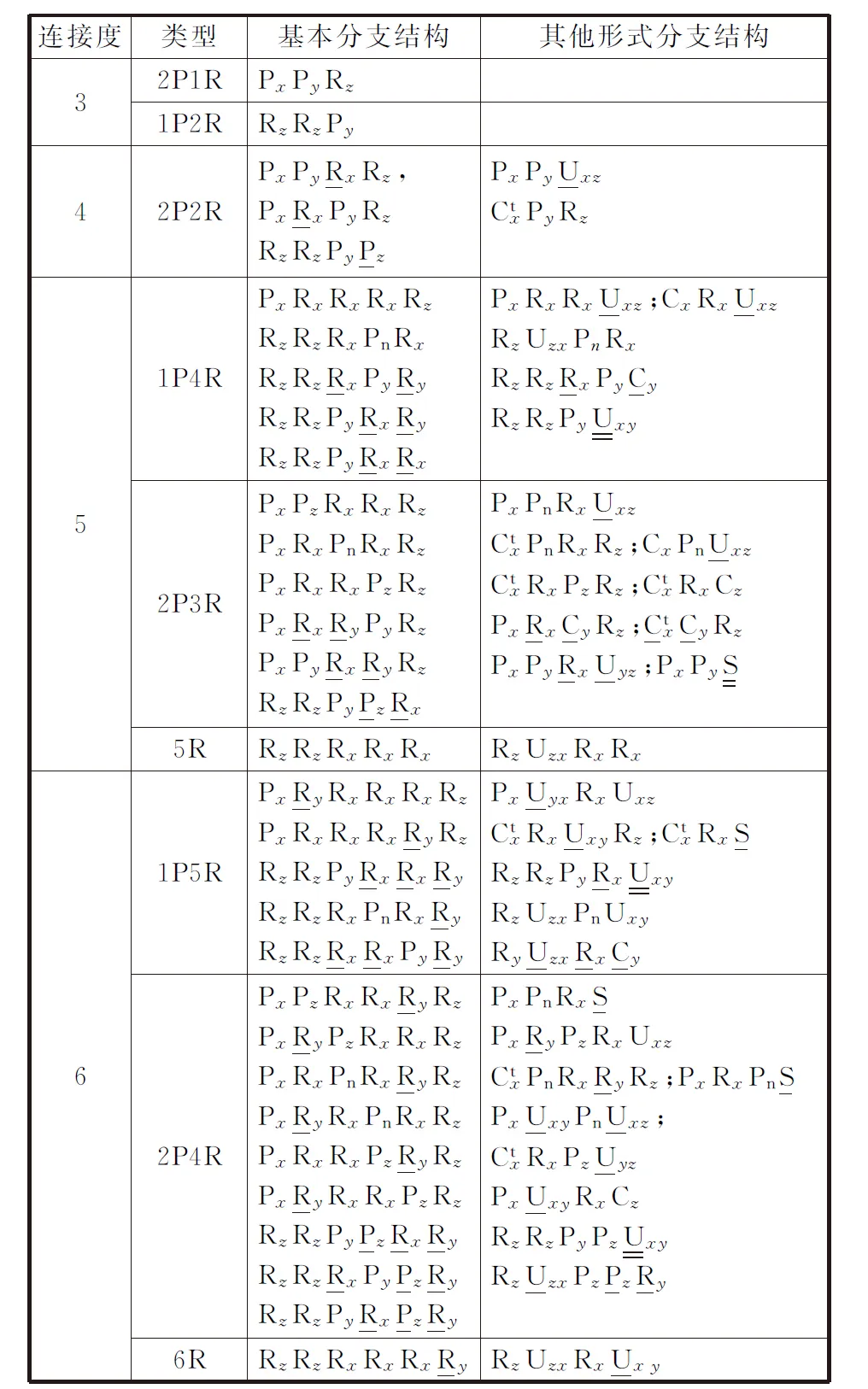
表2 $a1为线力矢时第一条主动分支的结构形式
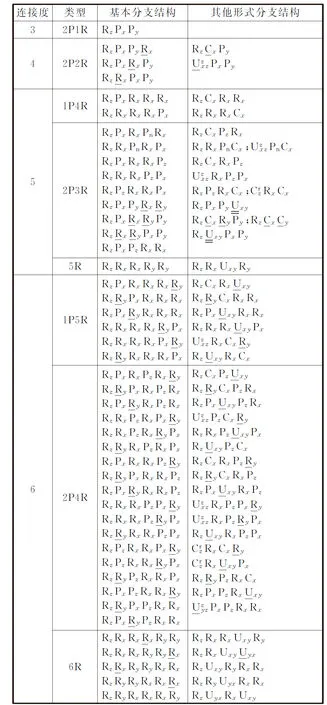
表3 $a1为偶力矢时第一条主动分支的结构形式
3.2 第二条主动分支构型综合
根据前述分析可知,第二条主动分支对动平台施加的驱动力螺旋$a2应始终与Z轴平行。根据式(8)中速度雅可比矩阵对角线上第二个元素ζ2≠0的条件,可确定出该分支驱动力螺旋的形式:
$a2=(0,0,1;Pa2,Qa2,0)
(18)
$a2为平行于Z轴的零节距螺旋,且必过平面PUV上的点B(xa2,ya2,0),故可得Pa1=ya1,Qa1=-xa1,且xa2和ya2不能同时为零。
若式(8)中的速度雅可比矩阵不降秩,则必满足条件g2≠0,且有
g2=$a2∘$21=R21+L21ya2-M21xa2
(19)
式中,$21为第二条主动分支的主动螺旋。
类似于第一条分支主动螺旋$11的确定方法,在满足g2≠0的条件下,求出第二条分支主动螺旋$21:
(20)
由式(20)可知,第二条主动分支的主动螺旋$21有两种,即平行于Z轴的无穷大节距螺旋和平行于Y轴的零节距螺旋,如图3所示。
同理,根据主动螺旋与驱动力螺旋的形式,可确定出该分支中所有可行非主动螺旋的具体类型和数目。
类型Ⅰ$21为无穷大节距螺旋
Ⅰ-1 轴线平行于X轴的零节距螺旋有且仅有1个,可直接或通过移动副与动平台相连。
Ⅰ-2 轴线平行于Z轴的零节距螺旋最多有3个,此类螺旋中间不能插入其他形式的零节距螺旋。
Ⅰ-3 轴线垂直于Z轴的无穷大节距螺旋最多有2个。
Ⅰ-4 轴线平行于Y轴的零节距螺旋(惰性螺旋)最多有1个。
类型Ⅱ$21为零节距螺旋
Ⅱ-1 轴线平行于Z轴的零节距螺旋最多有3个。
Ⅱ-2 轴线平行于X轴的零节距螺旋有且仅有1个。
Ⅱ-3 轴线垂直于Z轴的无穷大节距螺旋最多有2个。
Ⅱ-4 存在轴线平行于Y轴的零节距螺旋(有且仅有1个),该螺旋必须直接或通过同向无穷大节距螺旋与主动运动螺旋相连。
同样,按照分支连接度的不同综合出第二条主动分支的所有结构形式,如表4所示。
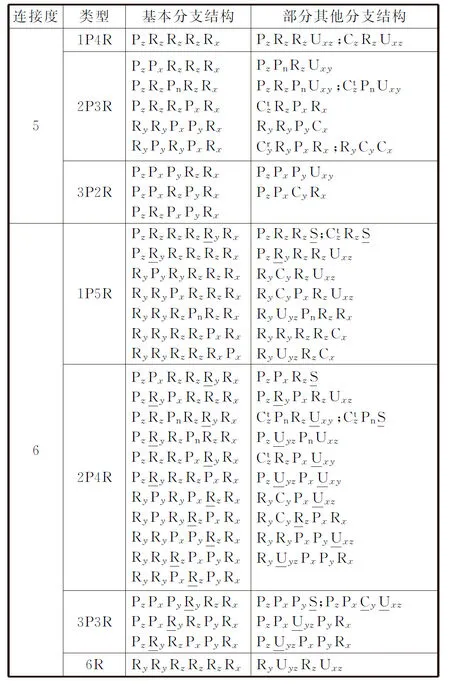
表4 第二条主动分支的结构形式
4 并联机构型综合
2条主动分支运动链构型综合完成后,可从表2或表3中任选1条运动链作为第一主动分支,然后从表4中选取1条运动链作为第二主动分支,再加上恰约束分支、动平台和静平台,即可构造出含有恰约束分支的两转动无耦合并联机构。为使机构具有无耦合运动特性,2条主动分支须满足一定的装配要求。其中,主动副的方向由对应运动链中第一个运动副的配置方位确定,表2分支中的末端非惰性转动副轴线必须与恰约束分支的第一个转动副R1的轴线平行,表4分支中的末端非惰性副转动轴线必须平行于恰约束分支的第二个转动副R2的轴线。
值得注意的是,第一条支链的驱动力螺旋为线力矢(表2中的支链形式)时,支链末端的运动副不能与动平台直接相连,而只能与恰约束分支的连杆相连,否则无法保证驱动力螺旋与运动螺旋$2的距离为定值。第一条支链的驱动力螺旋为偶力矢(表3中的支链形式)时,支链末端运动副既可与恰约束分支的连杆相连,又可与机构动平台相连,但选择与动平台相连时,分支的连接度不能小于5。
例如,分别从表2、表4中选取结构形式均为CRRR的运动链作为机构的2条主动分支,可得新型2-CRRR/RR两转动无耦合并联机构,如图4所示。同理,通过不同运动链结构形式的主动分支运动链与恰约束分支组合可得到其他新型机构,如图5、图6所示。
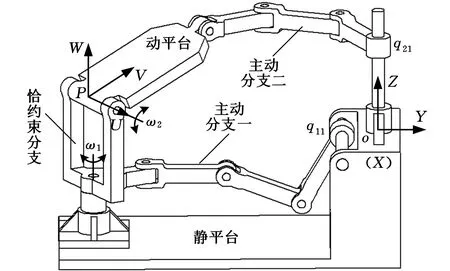
图4 无耦合2-CRRR/RR并联机构Fig.4 Uncoupled 2-CRRR/RR parallel mechanism

图5 无耦合RURU-CRU/RR并联机构Fig.5 Uncoupled RURU-CRU/RR parallel mechanism

图6 无耦合2-RURU/RR并联机构Fig.6 Uncoupled 2-RURU/RR parallel mechanism
5 结论
(1)本文基于分支驱动力螺旋理论,提出了含有恰约束分支的无耦合两转动并联机构型综合方法,并基于该方法综合出多种新的机构类型。
(2)综合出的机构具有结构简单、运动解耦性好、控制容易等特点。
所提出的并联机构型综合方法可应用于其他自由度类型无耦合并联机构的构型综合。
