导弹尾焰对红外搜索跟踪系统的干扰分析
2022-01-22李炎冰陈洪亮鲁海玥仇振安
李炎冰,陈洪亮,鲁海玥,仇振安
(1.光电控制技术重点实验室,河南洛阳,471000;2.航空工业集团公司洛阳电光设备研究所,河南洛阳,471000)
0 引言
红外搜索跟踪系统(IRST)具有不易受电子干扰、被动探测、隐蔽性好、定位精度高、探测隐身目标能力强等特点,已成为现代军机重要的战术传感器之一。
IRST引导中远程导弹攻击目标时需要跟踪目标完成制导。本文针对迎头、侧向和尾追三种攻击态势,仿真了导弹的飞行轨迹,发现导弹发射后会出现在IRST的视场内,由于导弹尾焰的红外辐射特性与目标相似,因此会对IRST跟踪真实目标产生干扰。
目前国内外还没有专门针对导弹尾焰的抗干扰研究。Simmons认为导弹尾焰包含水、二氧化碳、臭氧、含金属离子的分子等多种混合物[1]。Kuzmin等人通过仿真得出导弹尾焰的红外特征光谱分布在2.7μm和4.3μm附近[2]。唐善军研究了一种基于目标和红外诱饵弹不同运动模式的旋转导弹导引头抗干扰方法[3]。杨开,李少毅研究了基于朴素贝叶斯分类器的空中红外目标抗干扰识别方法[4]。
针对导弹尾焰干扰问题,本文提出了基于图像处理和数据处理相融合的算法。仿真结果表明,算法可以区分真实目标与导弹尾焰,降低导弹尾焰的干扰,具有较好的工程应用价值。
1 导弹攻击对IRST的干扰仿真分析
1.1 仿真方法
采用比例导引法,建立导弹与目标相对运动方程。设某时刻目标处于M点,导弹处于0点,目标速度是vm,导弹速度是v ,二者在同一平面内。图1中的R是导弹和目标间的距离;θm和θ分别是目标与导弹的速度矢量和参考线的夹角;q 是目标视线角;ηm和η分别是目标和导弹速度矢量与视线的夹角,称为前置角。利用相对运动关系,加上比例导引方程,可得到如下方程组:

在给定初始条件以及已知k,v,vm,θm的情况下,方程组可解[5]。
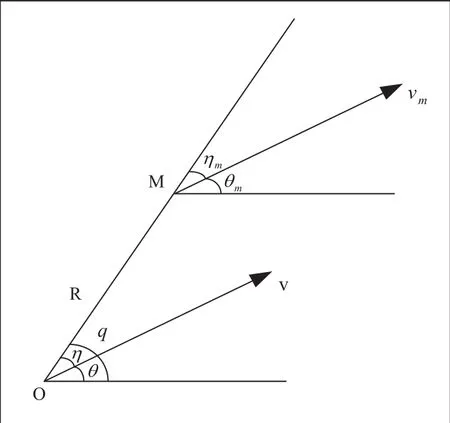
图1 导弹和目标的运动关系图
1.2 仿真条件及结果
假设载机在距离目标机50km时发射导弹,载机高度10km,目标机高度分为7km和13km两种情况,两机速度均为0.9Ma。通过MATLAB仿真结果如下:
(a)迎头对飞条件下,导弹会进入IRST视场内;
(b)侧向进入条件下,导弹不会进入IRST视场内;
(c)尾追条件下,导弹会进入IRST视场内。
综上所述,在迎头和尾追态势下当IRST引导载机发射导弹后,导弹会进入IRST的视场内。导弹尾焰燃烧时产生的颗粒在红外图像中表现为局部的亮斑,其灰度、形态以及局部信噪比都与真实目标相似,甚至尾焰颗粒的局部信噪比要高于真实目标,以上原因会导致尾焰颗粒会被误认为是目标而检出,如图2所示。

图2 原始图像
IRST利用被检出目标的角度信息,驱动扫描机构对目标形成稳定跟踪,若尾焰颗粒被检出,会导致扫描机构运动到错误的位置,造成对真实目标的跟踪不稳定甚至丢失,因此导弹尾焰会对IRST跟踪目标带来干扰,为了确保IRST跟踪真实目标的稳定性,需要研究IRST抗导弹尾焰干扰的方法。
2 IRST抗红外干扰解决方案
针对某些态势下导弹尾焰颗粒会对IRST跟踪目标带来干扰,我们提出了采用图像处理和数据处理的方案来剔除干扰。
图像处理采用多帧关联和门限滤波的方法,具体如下:
(a)统计目标的历史帧位置信息,当尾焰颗粒进入视场后,如果颗粒的位置不符合目标的运动特性,超出目标位置滤波波门,则将其排除;
假设目标检出框的结果为:

其中,N 为目标个数;ti、li分别为目标矩形框左上角顶点垂直坐标、水平坐标;bi、ri分别为目标矩形框右下角顶点垂直坐标、水平坐标。目标的位置为:
其中,记录颗粒坐标位置(xk, yk),判断其是否在历史目标坐标的3×3范围内。
(b)对目标历史尺寸多帧累积后平滑滤波,得到目标的稳定尺寸特征;当颗粒进入视场后,与目标的稳定尺寸特征比较,如果差异超过设定门限则将其排除;
(c)计算目标的局部信噪比变化范围,设定上下门限(SNR1,SNR2)。当颗粒进入视场后,计算其局部信噪比,如果颗粒比较亮,其局部信噪比超过上门限SNR2则将其排除,如果颗粒比较弱,其局部信噪比低于下门限SNR1则将其排除。
局部信噪比的计算公式为:

其中:f 为目标的平均灰度值;µ为局部背景的平均灰度值;σ为局部背景灰度的均方差。
经图像处理剔除大部分干扰后,潜在目标还需数据处理进一步确认,主要采用航迹预测和自适应滤波的方法:
(a)在单目标跟踪过程中,对真实目标进行航迹关联及运动特性累积,建立起对目标的观测方程;估计出惯性系下目标角位置、角速度、角加速度,综合系统误差和估计误差,设置目标新量测的滤波波门,并在稳定跟踪过程中根据目标运动特性的变化对波门进行实时修正;对于稳定跟踪过程中可能出现的假目标,通过由真实目标建立的自适应波门进行有效剔除;
由于r与α和β是相互独立的,nk和wk的协方差阵分别为:

式中,斜距离标准差σr=5m,取方位角标准差σα=0.03°俯仰角标准差σβ=0.03°。为距离扰动均方差,为方位角扰动均方差为俯仰角扰动均方差。由于方位扰动是由切线上的线扰动所引起的,所以式中,r为目标斜距离。同理,
(b)在目标被遮挡或其它原因导致目标暂时丢失时,算法根据先前建立的航迹对目标进行预测,随递推时间长短设置相应的滑动波门,对重新捕获的目标进行角位置确认,如此可屏蔽跟踪预测过程中的杂波干扰,有效重新捕获目标。
采用上述算法的目标检出结果如图3所示,只有真实目标被检出,尾焰颗粒被识别而没有被检出,IRST不受尾焰颗粒的影响,提高了抗干扰能力。

图3 加载算法后图像
3 结论
本文针对导弹尾焰对IRST跟踪目标的干扰问题提出了基于图像处理和数据处理相融合的算法,该算法采用多帧关联、航迹预测和自适应滤波等方法进行虚警剔除,提高了IRST的抗干扰能力。在实际应用中,由于使用场景的复杂性和导弹种类的多样性,需要根据实际使用情况对算法进行优化迭代。
