基于GPS的异地时间测量仪同步技术
2022-01-22陈瑞姬博文
陈瑞,姬博文
(西安工业大学,陕西西安,710021)
0 引言
20世纪以来,身管武器的发展迅速且受到越来越广泛的应用[1],该类武器在研制和生产过程中,需要对其出射弹丸的飞行速度态参数进行测试,由于被测的目标具有体积小、材质多样、射频高、射速快且散布较大等特征。现有的非接触式测量设备[2-4]中,基于光电探测原理构成的天幕靶和光幕靶等区截装置,以其靶面大、响应频率快、测速范围广、使用方便、成本低廉等优点,非常适用于构成区间截取速度测量(简称区截测速)系统,是当前身管速射武器弹丸飞行速度的测量最主要的设备之一[5,6]。
将区截测速原理用于弹丸飞行速度测量,是在预设的弹道方向上,按照需要测量的位置(包括初始弹道、中间弹道或终点弹道位置等)截取一定长度的弹道区间,并在截取的弹道区间内排列两个与预设弹道方向垂直的区截探测装置(如天幕靶或光幕靶),当弹丸穿过区截探测装置时,其向时间测量仪输出响应信号,通过时间测量仪记录弹丸穿过各区截探测装置的时间[7],结合区截探测装置之间的布放距离,计算弹丸在指定区截弹道内的飞行速度[8,9]。
当前靶场测试试验需求环境下,对身管武器全弹道弹丸飞行速度测量的要求越来越高,区截探测装置截取的弹道区间长度大幅增大,常达数百米甚至数公里以上,区截测速装置难以接入同一台时间测量仪,而多台异时的时间测量仪在工作时又没有统一的时钟基准,对测试引入较大误差[10,11]。为了保证多台异地时间测量仪的时间测量精度,本文基于GPS (全球定位系统)研究了一种时间测量仪时间同步技术,解决身管武器长区截弹道测试中异地时间测量仪时钟基准不同步的问题。
1 工作原理与整体设计
将区截装置1和区截装置2沿预设弹道方向垂直放置,相互平行的两个探测光幕面构成双光幕区截测速原理,如图1所示。

图1 双光幕区截测速原理
图1中,s表示区截装置1和区截装置2的间距,他们接入同一台时间测量仪,当弹丸依次穿过两台区截装置时,由于遮挡会引起区截装置探测面内的光通量改变,以此为基础在其输出端产生一个脉冲信号并发送至时间测量仪。时间测量仪以区截装置1输出的脉冲信号作为零时刻启动信号t1,以区截装置2输出的脉冲信号作为停止信号t2,提取对应的信号特征(如上升沿)即获取弹丸穿过两个区截装置的时间,结合布靶时测量的间距s,可计算弹丸在截取弹道内的平均飞行速度,如式(1)和式(2)所示。

上述过程中,时间测量仪给定了起始信号和停止信号间隔时间的测量结果,决定了速度测量精度,常见的时间测量仪的基本原理是由其内部计数电路实现的,如图2所示。

图2 时间测量仪基本原理
图2中时间测量仪在启动脉冲信号到来时使能其内部计数器电路开始工作,截止脉冲信号到来时计数器停止工作,通过这段时间内计数的时基脉冲个数并结合其频率,计量启动脉冲和截止脉冲的时间。
随着身管武器射程的增加,区截装置之间的布放距离也随之增加,但由此带来各区截装置与测时仪间的通讯线缆越来越长,且受地形影响不易铺设,而采用无线通讯的方式会由于靶场环境的影响,使得测试可靠性而大幅降低。因此本文提出的基于GPS异地时间仪测量方案,在测试现场给异地区截装置各自配备一台时间测量仪,通过GPS对所有时间测量仪进行时间同步,使各时刻在同一时间基准下,保证时间测量精度,如图3所示。

图3 异地GPS测时仪工作原理
图3中异地的测时仪工作前先接收GPS卫星信号,并利用 PPS(Pulse Per Second,PPS)信号对本地时钟脉冲进行同步,最后以带有PPS标签的时间为基准测量脉冲时间。利用异地GPS测时仪组成的区截装置可两两一组分布于弹丸飞行全弹道范围内,弹丸依次穿过各区截装置后获取带有GPS时钟基准的过幕时刻序列,不但可以在长区截弹道下测量在任意两地之间的弹丸飞行速度,还可通过多站点的方式测量弹丸的速度降等参数。
基于GPS的异地时间测量仪整体设计如图4所示

图4 基于GPS的异地时间测量仪整体设计
图4中将区截装置采集的弹丸信号经信号采集电路转换为启动脉冲和停止脉冲两路信号,先后接入FPGA使测时逻辑模块开始工作,启动信号启动测时仪中的计数器开始工作,停止信号停止计数器工作,随后锁存数值并输出,最后得到两路信号之间的时间。过程中,由GPS接收电路不断的获取GPS相关信息与PPS秒脉冲,当PPS来临后清零计数器,直到启动信号与停止信号来临,则异地的时间测量仪均以某一确定的PPS信号为基准,保证了测量的同步性。最后测得的相关数据最后可通过串口发送给数码管,在显示电路部分进行显示,同时也可通过以太网传输电路发送给上位机,通过上位机对数据进行保存,方便用户进行数据提取。
2 电路实现
基于GPS的时间测量仪主要通过FPGA逻辑电路设计实现,其中FPGA核心电路主要实现基于卫星信号的时间测量,配合信号隔离接口电路采集区截设备的输出信号,完成弹丸飞行时间的测量,如图5所示。

图5 电路实现系统框图
2.1 FPGA核心电路
FPGA核心电路主要完成驯服时钟和脉冲计数两项功能。
驯服时钟电路可以接收GPS信号,直接获取当前PPS脉冲信号并通过解码得到该PPS信号对应的UTC(Coordinated Universal Time 协调世界时间),并以此驯服内部的OCXO(Oven Controlled Crystal Oscillator 高温恒温晶振),提供被GPS同步后的高稳定时钟信号。设计采用了闭环控制守时技术,考虑了卫星信号中断或出现干扰故障时,仍能在一定时间内输出精确的时间同步信号,实现高精度守时。
驯服时钟电路组成原理如图6所示。

图6 驯服时钟电路原理
图6驯服时钟板接收外部卫星时间信号,通过MCU解码得出当前UTC时间值,MCU和FPGA电路采集恒温晶振OCXO的时钟信号,其输出为稳定的10MHz频率信号,保证了较好的精度基准。
用同步后的时钟进行脉冲时间测量通过FPGA的时统功能设计实现,主要分为对时设计、守时设计和计数电路三个部分。
对时设计是指在驯服时钟电路输出的PPS秒脉冲信号时取其上升沿有效,并以解码的UTC时间为标签实现对应,PPS信号与UTC时间对应关系如图7所示。

图7 PPS脉冲与UTC解码
用PPS脉冲对本地时钟锁相稳频的10MHz晶振进行同步,将PPS秒脉冲信号接入本地时钟计数器的清零端,当PPS秒脉冲信号有效时对本地时钟计数器进行清零操作,实现本地时钟与GPS信号的同步。
守时设计是考虑在测量现场地形起伏、阴云天气或电磁干扰等环境下,可能导致授时接收端GPS信号丢失,会出现PPS秒脉冲信号和UTC时间短暂失步或不稳定的情况,此时以本地10MHz晶振为基准,通过计数产生伪PPS信号记为PPS’。时间测量仪在上一次成果获取GPS的搜星信号后,基于本地时钟计数产生的PPS’秒脉冲一直持续,并在GPS秒脉冲信号丢失时代替PPS信号对本地计数器清零,保证该段时间内下一秒产生的秒信号与PPS秒脉冲信号同步。当GPS通讯恢复后,则重新由接收到的PPS秒脉冲信号接管清零操作。
上述过程设计的原理如图8所示。

图8 本地守时设计原理
依据本地晶振10MHz的基准设计计数器为24位,当计满107次时满1s,则产生一个PPS’信号。图8中的10MHz时钟经过非门延迟半个时钟周期输入到D触发器的输入端,当PPS’信号产生后通过D触发器对本地秒计数器复位。
计数电路由FPGA内部的计数器实现,它除了通过本地时钟信号产生秒脉冲信号外,还接入了区截探测器的信号输出端,当弹丸飞行穿过区截探测器时,来自区截探测器的探测信号使计数器输出当前记录的脉冲个数,通过清算脉冲个数结合当前的UTC时间,可以在UTC秒级精度下得到更高精度的弹丸飞行时间信息,如该技术选用的OCXO时钟频率为10MHz,则在忽略OCXO漂移的情况下,可以在当前UTC秒级时间下,继续得到精度为0.1μs的弹丸飞行时刻信息。这样的时刻信息由每个区截探测器结合对应的时间测量仪获取,共计n个。且他们通GPS时钟基准进行了时钟同步,可通过直接相减的方式获取任意两个去接探测器之间的时间信息。
2.2 信号隔离接口电路
时间测量仪需连接时间间隔测量设备以引入弹丸的启动和停止信号,为避免测量现场如雷电等强电磁对其影响,设计信号隔离接口电路实现电路隔离,主要光电耦合器件实现。光电耦合器件中输入电信号驱动发光管产生可被接收管接收的光信号,接收管探测到该光信号后产生电流在驱动电路端产生输出,此过程中信号从光到电再到光的转换实现了隔离,且其输入端属于电流驱动元件,具有较好的共模抑制作用使其具备一定抗干扰能力,可大大提高信噪比。信号接口电路设计如图9所示。

图9 信号隔离接口电路
3 软件设计
时间测量仪的主要工作流程受MCU控制,其主要作用是在时间测量仪上电后进入电压自检,通过内部AD采集检查整体电路所需电压是否正常,通过后开始接收当前的卫星信号及PPS秒脉冲信号,通过串口数据解析,能够检测出当前的卫星状态,一般情况下,卫星信号搜索大约3-5分钟。在卫星信号正常后,通过卫星时间与本地时钟进行同步,之后进入无线通讯自检状态,所有状态由前面板显示屏显示状态,时间测量仪可进入测量状态,等待区截装置的触发信号。时间测量仪收到触发信号后,读取数据,并将时间信号发送给上位机,随后接收上位机命令,进入下一次试验或结束。
软件流程如图10所示。

图10 软件流程图
4 仿真与试验
根据时间测量仪软硬件设计的内容搭建原理样机并进行仿真与试验,验证设计的可行性和稳定性。
在软件中完成FPGA逻辑电路设计并进行仿真,依据GPS的报文格式,接收帧头和时间信息并将存入的信息进行判断筛选,选出有带有时间信息的报文,从报文中分离出时间信息,并可以通过时区换算为北京时间。当PPS信号来临后,计数器开始清零操作并开始计数完成时间同步,仿真结果如图1所示。

图11 GPS时间同步测量仿真
如图10所示,g1和g2表示区截装置输出的弹丸信号,当g1信号上升沿到来时计数器输出一组测量结果,g2信号上升沿来临输出另一组测量结果,由于他们格式相同且均被打上了GPS解码的时间标签,该标签通过读取num_nsxi(其中i=1,10,100;表示计时精度)得到。
使用信号源产生时间固定的两路方波信号g1和g2,用于代替区截装置连接至测时仪提供弹丸过幕信号,设置不同的信号间隔时间设计两组测试试验。
将其接入无GPS信号的传统时间测量仪得到数据如表1所示。

表1 传统本地时间测量仪试验数据 (单位:μs)
不改变试验条件,将信号源输出接入本文设计的基于GPS信号的时间测量仪进行测量,数据如表2所示。
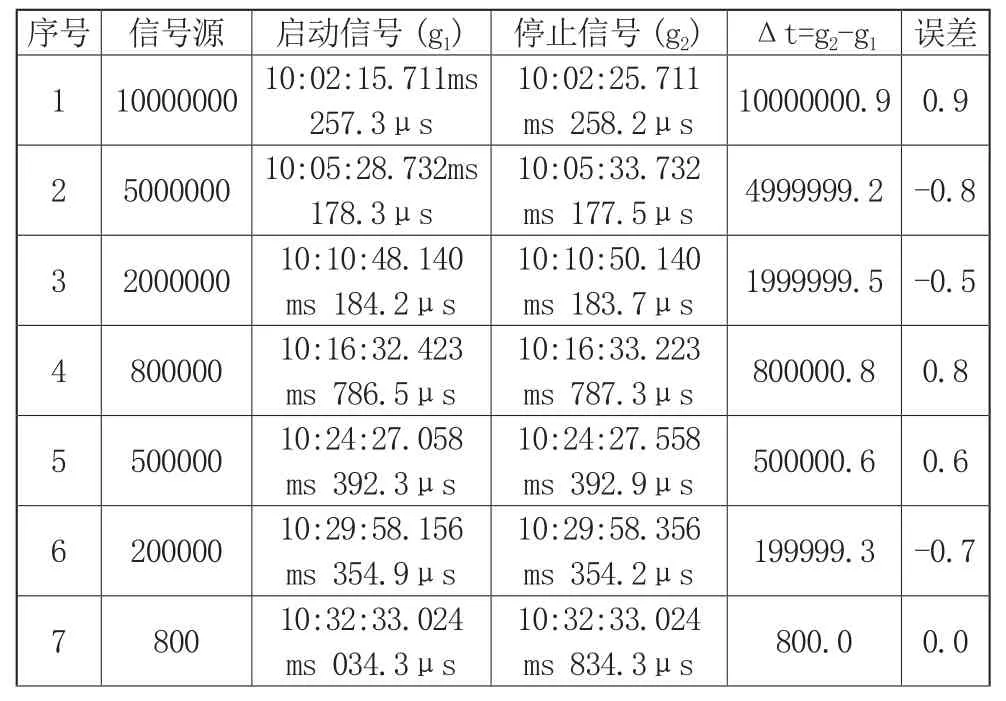
表2 GPS异地时间测量仪试验数据 (单位:μs)

8 500 10:38:41.482 ms 297.5μs 10:38:41.482ms 797.4μs 499.9 -0.1 9 200 10:44:46.638ms 943.2μs 10:44:46.639 ms 143.2μs 200.0 0.0 10 50 10:48:12.251 ms 594.7μs 10:48:12.251 ms 644.7μs 50.0 0.0平均值 0.02
对比表1和表2的数据可知,设计的基于GPS技术的异地时间测量仪与现有本地时间测量仪具有近似的精度。
5 结束语
通过区间截取装置测量弹丸飞行速度,是当前靶场测试中广泛采用的测试技术之一,其实现过程中需通过时间测量仪测量弹丸穿过各区截探测装置的时间,结合区截探测装置距离解算弹丸飞行时间。针对全弹道测量中各区截装置距离较远,需要采用多台异地时间测量仪分别配合异地区间截取装置的方案,为解决不同时间测量仪没有统一时钟基准的问题,研究了基于GPS的异地时间测量同步技术,以MCU和FPGA为核心主要完成了FPGA内部逻辑对时电路、守时电路和计数电路的设计和与区截装置连接的信号隔离接口电路设计,考虑了实际使用中可能出现的卫星信号短暂失步的情况并给出了解决方案。研究的方法可为基于GPS、BDS等卫星信号的时间同步异地时间测量仪设计提供参考,也可直接为现有时间测量仪加入时钟基准同步功能,为身管武器全弹道、长区截范围的飞行速度测量提供保障。
