基于毫米波雷达的人体运动微多普勒特征研究
2022-01-22陈海玲
陈海玲
(梧州职业学院,广西梧州,543002)
关键字:毫米波雷达;微多普勒;调频连续波(FMCW);人体运动特征分析
0 引言
随着自动驾驶技术的不断进步,人体识别检测在车外行人监控、车内驾驶员监控、婴幼儿车内安全等不同场景下发挥着巨大的作用,并向更多领域拓展。在常见的人体检测方法中,毫米波雷达检测与摄像头、激光雷达、红外传感器等检测方法相比,有着检测范围广,不易受到光线、天气、热源等使用条件限制的优势,而微多普勒效应作为雷达人体检测中的重要依据得到了自动驾驶领域深入的研究。在毫米波雷达回波的微多普勒谱中,包含着丰富的人体运动特征信息,比如肢体运动频率、躯干微多普勒频率等物理特征,这些物理特征可以有助于提高识别人体的运动特征准确度。
1 微多普勒雷达介绍
雷达对目标进行探测,当被检测目标是运动物体或者雷达处于运动状态时,一定频率的电磁波照射在物体上反射以后,反射回波信号的频率会发生变化,这种雷达与物体之间的相对运动引起的频率调制效应被称为多普勒效应。利用测量得到的多普勒频移,可以计算出运动物体的径向速度等信息。假如被检测物体由多个部分构成,除了主体的运动外,其他部件还存在振动、转动等运动,这些部件的运动将会引起对回波信号附加的频率调制,这被称为微多普勒效应。多普勒频率表示如下:

其中,fdoppler为多普勒频率,λ为波长(m),Ve为速度(m/s),θ为到达角。
在雷达领域,多普勒频率通常用于计算目标的速度,多普勒频率响应对应目标主干的速度信息,而目标的特征可以通过微型多普勒识别。微多普勒对雷达的载频信号更敏感,而且多普勒效应有更高频带。对于毫米波雷达,多普勒带宽越宽,多普勒分辨率越好,更容易区分不同微多普勒特征的目标,人类的运动特性可以使用多普勒频率来确定。
2 微多普勒毫米波雷达系统
本文采用线性调频连续波(FMCW)毫米波雷达来检测人体运动特征,雷达系统核心的毫米波传感器模块是基于TI公司的76GHz到81GHz的毫米波传感器评估板AWR1243BOOST,此评估板包含MMWAVE-STUDIO 环境和 DCA1000 实时数据捕获适配器的相关资源,便于雷达原始数据采集存储,并在电脑上做相关的算法研究工作。AWR1243BOOST评估板如下图1所示。
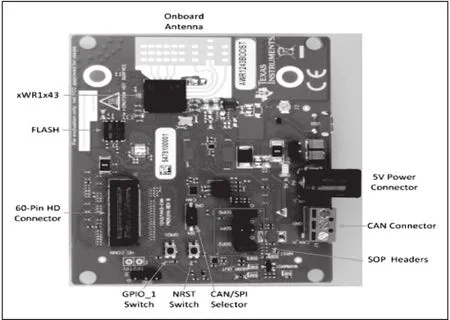
图1 AWR1243BOOST评估板
AWR1243芯片的中频带宽为15MHz,最高采样率为37.5MHz,通过LVDS接口把采集的数据传输到实时数据捕获适配器DCA1000的DDR中,通过MMWAVE-STUDIO 环境和USB接口把采集的数据传输到电脑中存储。在电脑中,通过MATLAB工具对接收到的数据进行数字解调,进行相关的微多普勒频率分析。
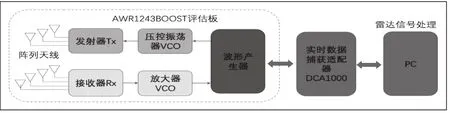
图2 微多普勒毫米波雷达系统框图
3 微多普勒雷达的信号处理
当雷达发射的信号为单频连续波信号时,运动目标的多普勒频率只与速度和雷达信号波长相关;而在使用线性调频连续波的情况下,多普勒频率包含在慢时间周期变化的频率项中。随着快时间变换的频率项中包含有目标的距离信息,因此采用不同的时间维度信息进行傅里叶变换,即可对相应的多普勒频率信息进行提取。由以上分析可以得到使用线性调频连续波对人体步态运动回波进行时频分析的方法,具体的信号处理流程如下。
首先,从采集存储的雷达回波原始采样数据中,取一段包含N个扫频周期的雷达回波采样数据,每个扫频周期T内有M个采样点,如图3所示。

图3 FMCW雷达采样回波信号结构示意图
其次,对采集存储的雷达回波周期数据进行二维空间上的转置操作,那么转置后的信号则如图4所示。
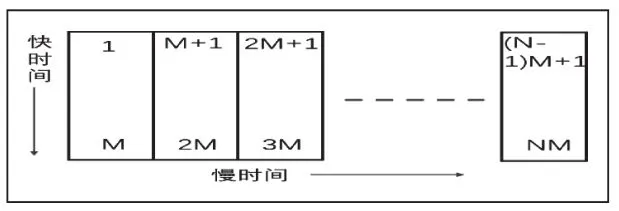
图4 重排采用信号结构示意图
最后,在采样数据转置后的回波信号基础上,如图5所示,分别对每一行采样点构成的信号数据进行N点短时傅里叶变换,得到该行对应的微多普勒频率随时间变化的分布信息,最后将所有行的微多普勒信息进行时间-频率二维图上相加,即可得到整体的微多普勒频率分布。

图5 雷达信号多普勒谱分析方法示意图
4 实验和人体运动微多普勒特征分析
在实验中,为了验证毫米波雷达系统,采用一个简单的钟摆作为刚性人体测试目标。钟摆长度为1.0米,通过毫米波雷达系统采集超过1分钟的雷达原始信号,并通过MATLAB软件按照信号处理流程,分析雷达信号的微型多普勒,钟摆摆动的多普勒谱如下图6所示。从多普勒图中可以清楚的看到,钟摆摆动的时间周期约为2.0秒,此实验证实了多普勒雷达系统运行良好。
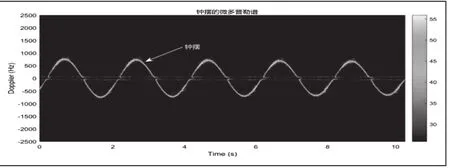
图6 钟摆摆动的微多普勒谱图
在验证雷达系统功能正常后,通过另外两种不同的实验来分析人体运动的微多普勒谱特征。实验一,人体在雷达正前方2米处步行远离雷达;实验二,人体在雷达侧边2米远处步行远离雷达。通过数据采集及信号处理,分别得到对应的微多普勒谱图,如下图7和图8。
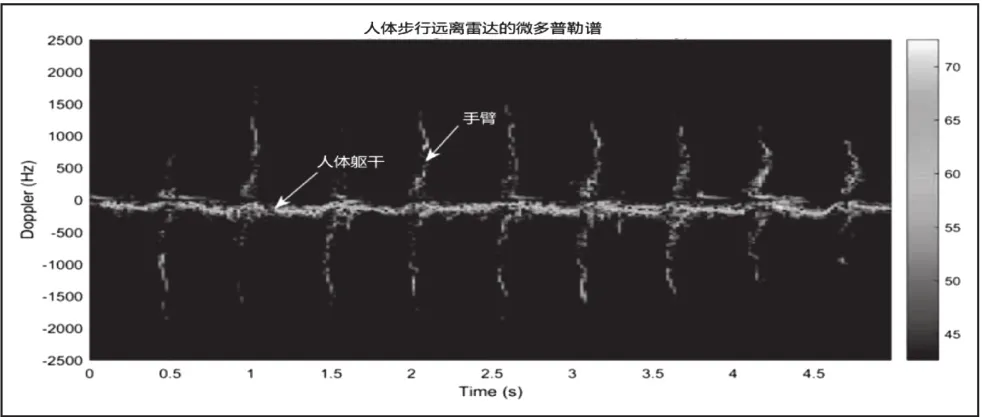
图7 人体在雷达正前方步行远离雷达微多普勒图
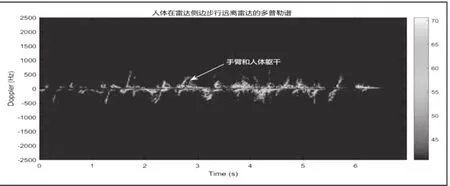
图8 人体在雷达侧边步行远离雷达的微多普勒谱图
实验中,为了简化人体步行场景,雷达俯仰视角只聚焦于人体上半身,因此捕获了手臂和躯干的微多普勒。从图7中,可以分析出,手臂运动的微多普勒特征明显弱于人体躯干的微多普勒特征;然而,手臂摆动的速度明显比人体躯干快。从图8中,可以分析出,人体相对于雷达侧身运动的微多普勒特征很弱,这是由于人体的径向速度相对较小导致。
5 结束语
本文对微多普勒雷达原理和毫米波雷达系统做了详细的介绍,提出了微多普勒谱信号处理流程,通过钟摆实验验证微多普勒雷达系统的状态,在钟摆实验的基础上,对人体两种步行运动模式的进行了微多普勒特征研究,验证不同的运动模式在微多普勒特征上存在明显的区别。后续的研究,可以对人体其它不同运动特征进行微多普勒分析,如跳跃和奔跑等。
