16位星空背景图像噪声抑制方法
2022-01-22王学伟
王学伟, 刘 君
(潍坊科技学院,山东 潍坊 262000)
0 引言
空间目标观测是利用地基或天基光学平台对空间目标进行成像观测,这里的空间目标包括人造卫星、飞行器残骸碎片等,背景为黑暗的深空,噪声包括空间辐射噪声、星空背景噪声和CCD暗电流噪声等,除此之外,还有数量较多、亮度较高的恒星。星空背景空间目标观测图像的特点是目标呈点状,尺寸小,无任何形状和纹理信息,亮度较弱,与恒星、噪声有相似的时域和频域特征,目标极易被湮没在噪声中,对目标的检测识别难度很大。正因如此,为了尽最大可能地增大目标信息量,空间目标观测成像系统的图像采集单元通常采用16位量化,即灰度等级为216=65 536。
1 研究现状分析
对于复杂背景中的弱小目标检测,文献[1]提出基于滤波器的传统噪声抑制算法,其前提为假设探测背景相对平缓,目标的局部辐射强度要大于背景杂波,表现为目标局部的灰度变化显著。另外,常用方法还有空域中值滤波方法[2]、高斯高通滤波算法[3]、Top-Hat算法[4]等,优点在于简单直观,但对背景中出现的剧烈变化和强干扰敏感,易出现虚警,导致性能下降。DESHPAND等[5]提出的最大中值滤波器,能够抑制图像上起伏的背景信号和边缘纹理信息,但对低信噪比的目标效果有限。
为了提高算法的适应性,一些研究提出了不需要图像先验知识的滤波技术。DENG等[6]提出绝对灰度均差(AAGD)法,使用局部平均法抑制背景噪声,通过局部对比度增强目标区域,该算法计算复杂度较低,但对于高强度边缘和结构背景混乱的场景,非目标区域也得到增强;WEI等[7]提出了一种基于多尺度局部对比度测量(MPCM)方法,利用对角线方向上的最小乘积作为最终增强结果,该方法能够同时增强亮目标和暗目标,在边缘去除方面取得了很好的效果,但在复杂背景和强杂波干扰下,其检测性能会下降;GAO等[8]将目标视为噪声中一种特殊的稀疏成分,采用基于马尔可夫场的混合高斯模型分离出目标,虽然能够得到相对更好的检测效果,但计算量较大。
基于人眼视觉系统的方法,利用小目标和背景之间的对比度差异来区分二者,典型算法包括局部对比度(LCM)算法[9],显著性和梯度差分测量(SGDM)算法[10],绝对方向均值差分(ADMD)算法[11],基于局部强度和梯度的算法(LIG)[12]和多尺度局部均匀性度量(MLHM)算法[13]。但此类方法难以消除背景中具有一定显著性的杂波。基于低秩稀疏矩阵分解的方法将图像视为稀疏目标图像和低秩背景图像的组合,然后利用矩阵分解算法得到目标图像,代表算法包括低秩稀疏矩阵分解(LRSMD)法[14]和基于图像块模型的算法(IPIM)[15]。但此类方法难以消除背景中的强边缘和尖锐噪声,并且矩阵分解过程需要迭代求解,占用计算资源较多,实时性较差。
为了抑制云层噪声,邓剑勋等[16]采用基于帧间信息关联的检测方法将“类目标”点剔除,检测精度高达86%,但是首帧检测耗时较长;侯旺等[17]基于拓扑不变原理对两幅深空背景暗弱目标图像进行匹配,以此来抑制背景噪声,性能超过传统算法,但鲁棒性有待改进;为了解决背景较为复杂情况下虚警率高的问题,刘旭等[18]通过DoG 滤波器抑制了图像中的大面积高亮区域,再通过改进的LCM 算法剔除高亮边缘和高疑似目标,该方法可以在降低虚警率的同时保证算法速度,但是由于模拟出的背景和实际图像中的背景存在偏差,可能会削弱目标能量。
深度神经网络也被一些学者用于星空背景下图像噪声抑制和弱小目标检测,杨其利等[19]利用全卷积递归网络进行弱小目标检测,噪声抑制效果优秀,但是该方法离不开大量数据集,其仿真数据集是在数百张不含弱小目标的背景图像中人工加入高斯信号构成,仿真实验与实际应用相距甚远。
2 背景噪声统计特性参数估计
图1所示为3幅典型的星空背景弱小目标图像,包含各种背景噪声以及复合噪声,这些图像中都有唯一的空间目标(为便于观察,已经用圆圈标注出来)。
从图1中可以看出,目标没有形状和纹理信息,与噪声高度相似,因此前述滤波类方法都很难适用。
为了降低目标检测的漏检率,增强算法的鲁棒性,本文提出了一种适用于16位空间弱小目标观测图像的噪声抑制方法。该方法的核心思想是通过分析噪声特性得出噪声的统计特性规律,依据统计特性消除噪声。空间小目标图像背景是大量低灰度连续的缓变背景,且像素数占据整幅图像的绝大多数。背景的灰度值(包括噪声的灰度值)通常低于恒星的灰度值,因此,分析背景的统计特性是抑制噪声和突出目标的基础。
以图1(a)为例对原始图像进行直方图分析,结果见图2。背景和噪声在直方图的位置位于低灰度区域,其统计特性可以认为服从高斯分布;恒星数量相对较少,均匀分布在高灰度区域。因此,通过分析低灰度区域的直方图特性,可以得到背景和噪声的统计参数。
星空背景空间目标观测图像的背景噪声,包括空间辐射噪声、星空背景噪声和CCD暗电流噪声等,在抑制这些复合噪声时都可以按照近似高斯分布的方法进行[20]。设复合噪声的均值为μ,标准差为σ,则背景和噪声分布在(μ-3σ,μ+3σ)的概率为99.7%,利用μ+3σ作为阈值可以将背景噪声从高亮度的恒星中区分出来。
本文方法采用不断舍弃高灰度区域、减小样本方差来获得统计参量。首先对整幅观测图像进行统计,得到整幅图像的均值μ和标准差σ,这时,高灰度的目标和恒星将会使统计均值μ和标准差σ偏大;然后再分别以μ+3σ,μ-3σ为上、下界计算统计参量,会将高灰度的目标和恒星排除,使得统计值更加接近真实值,重复上述步骤直到相邻两次计算的标准差比较接近为止,循环计算结束;最后从中找出标准差的最小值作为背景噪声的标准差,而该最小标准差对应的均值作为背景噪声均值。
设F(x,y),x=1,2,…,M,y=1,2,…,N,表示图1所示的原始图像,其中,M为图像的总行数,N为图像的总列数,F(x,y)∈[0,65 536]。本文方法包括如下6个步骤。
1) 计算星空背景空间目标观测图像Xi j的均值μ0和标准差σ0分别为
(1)
(2)
2) 引入新变量μ1,μ2和σ1,σ2,用于缓存逐渐减小的均值和标准差,进行赋值操作,即
(3)
3) 剔除过高和过低的灰度值像素点
(4)
4) 计算剔除过高和过低的灰度值像素点后的均值μ2和标准差σ2分别为
(5)
(6)
5) 判断σ1与σ2之差是否小于指定门限T(T的具体数值需根据具体图像而定)。即若|σ2-σ1|>T,则表示标准差未达到指定的缩小范围,进行赋值,即
(7)
对此情况标记为“未达到”,然后跳转到3);若|σ1-σ0|≤T,则表示标准差已达到指定的缩小范围,对此种情况标记为“达到”。为防止出现偶然收敛情况,如果连续3次为“达到”,则表示标准差已经缩小到指定的范围,循环计算结束;若连续“达到”的次数少于3,则继续跳转到3)。
6) 从上述连续3次“达到”的标准差中,找出最小的标准差σmin作为背景噪声的标准差σ,与之对应的均值μmin作为背景噪声的均值μ,即
(8)
根据对图1中3幅图像估计的高斯噪声均值和方差,矫正图像背景灰度,对于灰度小于μmin+3σmin的像素,将其灰度设置为kμmin,0.2≤k≤0.3,这样得到的图像背景均匀,目标突出。处理结果如图3所示。
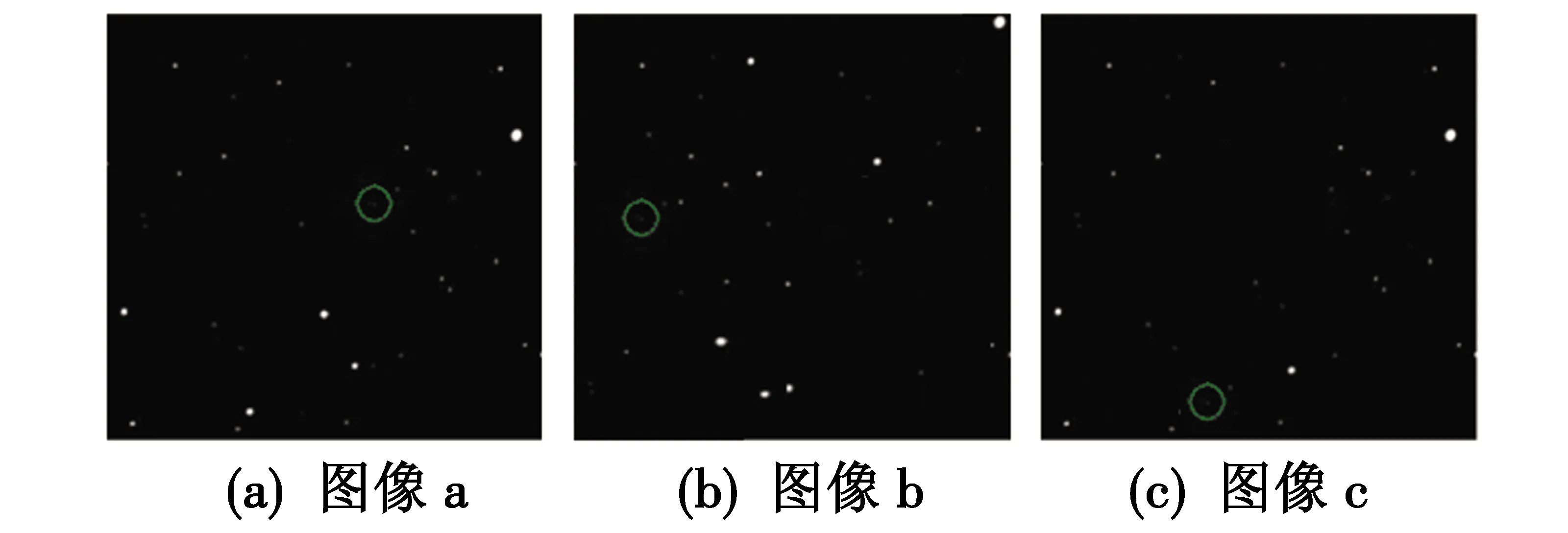
图3 抑制噪声后图像Fig.3 The images after background noise suppression
从图3中可以看出,在各种背景噪声下抑制噪声后,噪声显著减小,复合噪声得到抑制,目标被完整保留(为便于观察,目标用圆圈标注出来)。
对于此类复杂背景下的弱小目标,因为目标没有任何形状和纹理信息,且与背景和噪声高度相似,上述目标检测提取算法都很难达到理想的处理结果。
3 结束语
星空背景弱小目标观测图像与常规的视觉图像有很大差别,主要差别在于单独一帧图像中,目标携带的信息量太少,常规的时域频域图像处理方法难以直接使用,又受到观测条件的限制,难以获得弱小目标观测图像的大样本集,当前人工智能领域普遍采用的深度学习、神经网络等方法也难以被直接应用。
本文所做的工作属于图像预处理的范畴,即抑制背景、消除噪声,从而尽最大可能突出目标。本文的核心是概率统计学方法,将特定的图像像素点作为一个样本集,运用统计学的方法估计这个样本集的典型参数——均值和方差,以此获得抑制背景、消除噪声的基础数据,此基础数据对于最大限度保留目标信息是有效的。
