核电站巡检履带机器人力学分析与运动规划
2022-01-22李彰吴学洲朱性利
李彰,吴学洲,朱性利
(1.中核武汉核电运行技术股份有限公司,武汉 430200;2.核动力运行研究所,武汉 430200)
0 引言
核电站日常运行中需要有安全人员对仪表读数、环境温度和仪器运行状态等进行定时定点的巡查,这对于人员来说是一项重复性高、劳动强度大和面临辐射危险的工作,而针对核电站的应急处置任务,强辐照的恶劣环境更是会对人员的身体健康产生严重损害,具备耐辐照性能的机器人代替人进入危险区域开展巡检和应急等任务显得越发重要。
核电站内部具有非结构化和地形复杂的特点,各平台间采用了斜度较大的栅格板阶梯组成的楼梯,各平台中也存在着各类阶梯和管线,这对于机器人的通行和越障能力提出了较高的要求。履带式机器人相比于轮式机器人具备更强的越障能力,具有摆臂的履带机器人则可以通过变换姿态以适应地形和实现强越障通行,因此履带式机器人在特种机器人领域得到广泛应用。2011年,日本福岛核电站发生重大安全事故,各国派出的探查、清障和应急处置机器人均采用了履带式行走机构,如iRobot的Packbot和Warrior履带移动机器人、日本千叶工业大学的Quince机器人[1]、法国的RICA履带机器人[2]等。
针对核电站的特殊环境,为实现履带机器人高效率的地面通行和障碍物越障,在设计阶段对机器人的动力输出计算及在集成测试阶段对机器人的越障姿态规划则是保证机器人性能的两项重要措施。许多学者对履带机器人的越障性能和姿态规划都做了相关的研究[3-9]。在设计之初,针对机器人将面对的障碍物,对机器人的动力输出特性进行计算,是机器人动力装置选型和传动结构设计的前提。对机器人越障姿态的规划则是发挥履带机器人越障潜能,保证越障可靠性的前提。本文将设计一种双摆臂履带机器人,针对核电站环境的关键越障特征,建立用于履带机器人动力选型的计算模型,并将楼梯作为主要分析对象,进行越障姿态规划和实验验证。
1 履带机器人模型
针对核电站中机器人对斜坡、阶梯和楼梯等的越障需求,履带式机器人采用前后双摆臂履带式移动结构设计。通过履带的移动及前后摆臂的摆动实现机器人的前进、后退、转弯、跨越障碍物及攀爬斜坡楼梯等运动,摆臂的存在不仅强化了机器人对地形的适应能力,同时增加了机器人跨越障碍物及攀爬楼梯时的稳定性,当机器人执行任务时,摆臂展开可增加接地面积,能有效提高机器人移动平台的综合性能。
履带机器人主要包括主体支撑框架、主履带模块、摆臂履带模块和其他外设等。主体支撑框架是所有零部件安装的基础,主履带是机器人车体的主要运动部件,摆臂模块实现机器人跨越障碍物、攀爬楼梯时机器人车体的撑起与姿态调整,使得机器人具备更强的移动能力。
2 履带机器人越障力学分析
为了实现履带机器人在核电站的通行和越障能力,履带机器人的电动机输出力矩需满足动力要求,因此针对不同的越障需求建立越障运动的输出力矩计算模型,为动力选型提供依据。
2.1 斜坡分析
当机器人以较低速度匀速直线行驶在角度为α的斜坡上,期间忽略平台爬行过程中的空气阻力,且平台左右输出转矩镜像对称,则可以将平台看作是一个统一的整体,则有如下条件。
1)静止条件下,质量为m的机器人能静止在斜坡上不下滑需满足的条件为
μmgcos α-mgsin α≥0。(1)
根据静态条件可以得出,机器人若需在α=35°斜坡不自动下滑,需保证履带与地面的摩擦因数μ≥sin α/cos α=0.7。
2)动态条件下,机器人若以速度v在斜坡上匀速运动,为使机器人静力平衡,主履带的驱动力Fq应等于重力沿斜坡的分力和斜坡对于机器人的摩擦力之和。若机器人可以在λ=35°斜坡上运动,则机器人需要输出的驱动力矩应满足:

2.2 单臂自顶起分析
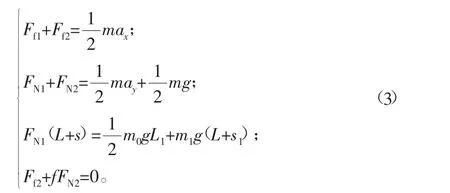
摆臂电动机的选型计算需要根据摆臂承担最大转矩时所需电动机的功率进行计算,根据机器人工况分析,当摆臂处于向前展开时,通过摆臂的向下转动与地面接触后将主履带抬起,主履带刚离开地面时机器人摆臂所受的力矩最大,此时的履带机器人位形和受力分析如图3所示。

图1 核电站履带机器人三维模型

图2 机器人爬坡分析图
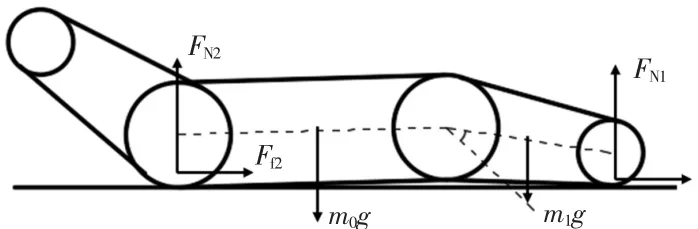
图3 履带机器人位形和受力分析图
机器人需要的转矩满足以下公式:
式中,L、s、s1分别为主履带前后轮间距、摆臂履带轮间距及摆臂重心离主履带轮毂的距离。
机器人输出需要的驱动转矩满足:

2.3 单阶梯越障分析
对于主履带越障的情况,随着倾角的增大,重心位置也逐渐上升,但是始终无法越过障碍物阶梯角的位置,直至机器人发生倾翻,此时仅靠主履带系统无法完成上述越障任务,需要摆臂的协助才能完成任务。机器人可以按照图4所示姿态A慢慢靠近阶梯,并将前摆臂靠在阶梯上面,然后通过前摆臂的顺时针翻转,在前摆臂的支撑下机器人主体逐渐被抬起,质心逐渐上升至姿态B,然后逆时针翻转后摆臂,当机器人质心在阶梯拐角时顺时针翻转前摆臂至姿态C,当机器人的质心越过阶梯顶角线时,整个机器人以阶梯顶角为支撑点旋转至姿态D,后摆臂脱离地面,机器人成功翻越障碍物阶梯。在这个过程中,姿态A和姿态C为机器人越障的两个关键状态,而姿态C直接决定了机器人能够跨越的最大高度。
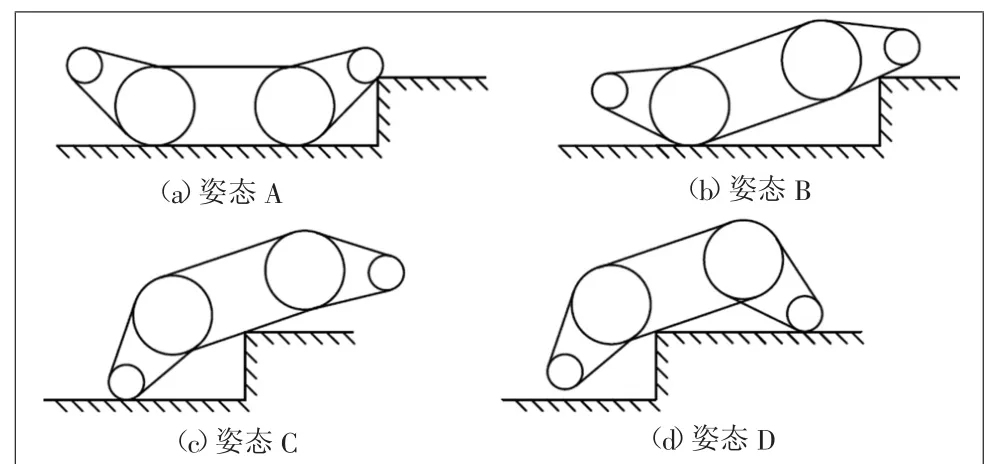
图4 机器人跨越阶梯障碍物示意图
1)姿态A——机器人刚触及阶梯。
当机器人面对前方的高障碍物可转动前摆臂,当前摆臂履带触及阶梯拐角后,以前摆臂的驱动力将机器人主体机身拉起,如图5所示。

图5 机器人接触阶梯的A状态
障碍物的高度越高,前摆臂的转角越大。可跨越障碍物的高度H满足下式:

当履带机器人攀越上阶梯时,其位形和受力分析如图6所示。
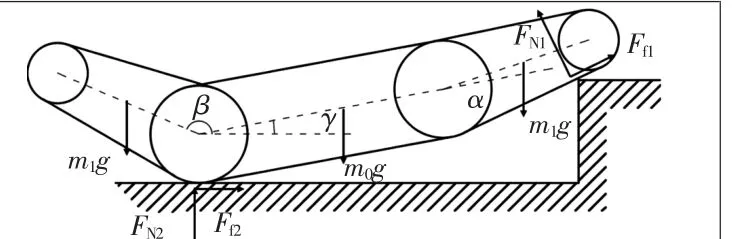
图6 履带机器人爬越阶梯履带机器人位形和受力图
2)姿态C——机器人跨越阶梯。
姿态C中机器人通过后摆臂的转动将机器人的整机重心抬高到能够跨越障碍物的高度,为机器人越障的关键姿态。该姿态决定了履带机器人能够越障的最高阶梯高度。此时,机器人与只有主履带越障时的情况一样,整机的重心需越过阶梯角,机器人底盘将会以阶梯角作为支点,在自身重力和履带牵引力的作用下绕其旋转,并成功翻越至另一层阶梯,如图7所示。

图7 双臂机器人跨越阶梯关键姿态
此时的履带机器人位形和受力分析如图8所示。
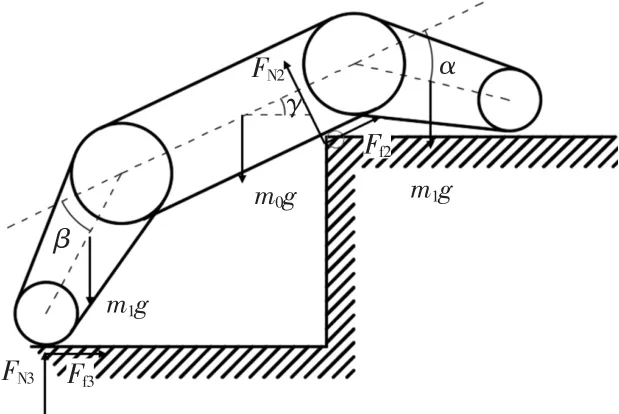
图8 履带机器人爬高阶梯位形和受力图
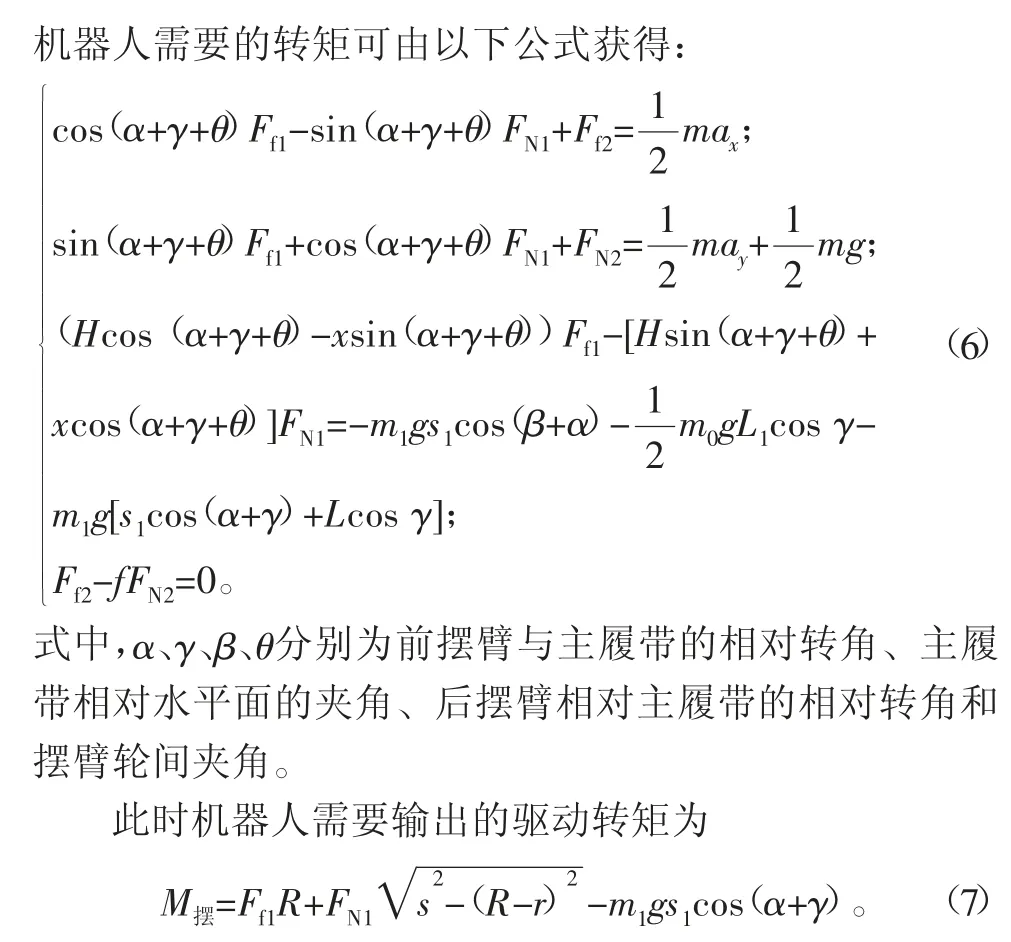
机器人需要的转矩可由以下公式获得:
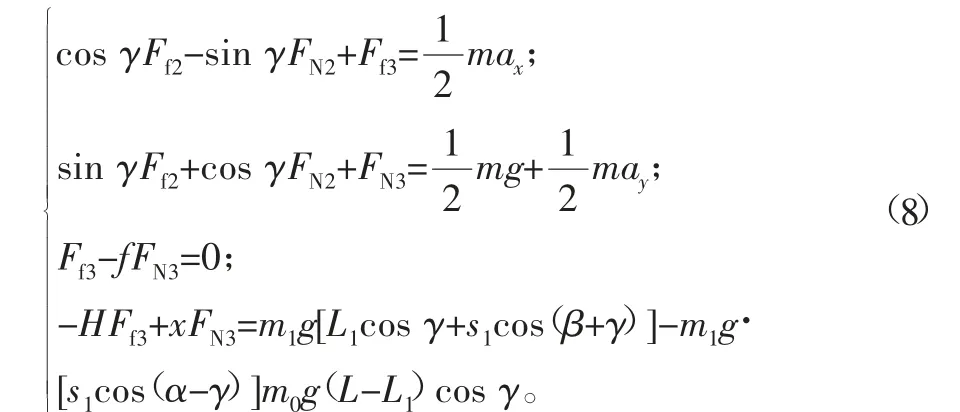
式中,α、γ、β、θ分别为前摆臂与主履带的相对转角、主履带相对水平面的夹角、后摆臂相对主履带的相对转角和摆臂轮间夹角。
机器人需要输出的驱动转矩满足:

结合式(2)、式(4)、式(7)、式(9)可以获得履带机器人攀越斜坡、低阶梯和高阶梯时主履带和摆臂履带的最大名义输出力矩,并将传动链和履带的传动效率考虑进计算模型后可获得主履带和摆臂履带电动机的选型依据。
3 履带机器人越障姿态规划
由于楼梯是阶梯型障碍物的组合,阶梯性障碍物的特性都会在楼梯越障过程中体现,而且楼梯是核岛平台间连接的主要通道,将楼梯作为主要分析对象。双摆臂履带机器人攀越楼梯的全流程规划(如图9)如下:
1)当机器人接近楼梯时,前摆臂上摆至与楼梯高度和距离相适应的角度,前进并靠上楼梯到达图9(a)状态;
2)依仗主履带和摆臂履带的牵引作用,将机器人推动至机身倾角与楼梯倾角相适应的位置,机器人到达图9(b)状态;
3)机器人继续前进,后摆臂放下,主履带行进速度与后摆臂下摆速度保持同步,直至图9(c)状态;
4)机器人前摆臂放下,使摆臂履带和主履带平行,达到图9(d)状态;
5)机器人保持图9(e)形态在楼梯上移动,当前摆臂越过最后一阶阶梯后,前摆臂下放至图9(f)状态;
6)机器人继续行进,当机器人倾角小于楼梯倾角,代表机器人进入图9(g)状态;
7)主履带前进,前摆臂逐步上摆至与机身平行状态,由于重力作用,机器人会绕楼梯拐角旋转,当机器人倾角为零,主履带会进入到与地面的最大接触状态,代表机器人达到图9(h)状态;

图9 双摆臂履带机器人攀越楼梯姿态规划图
8)此后后摆臂回摆,机器人回复到平地运行状态。
采用双摆臂履带机器人平台,在民用楼梯上对该流程进行测试试验,试验的楼梯参数为:楼梯阶梯高度为160 mm,深度为300 mm,楼梯斜度约为27.3°。
在这个越障过程中,履带机器人能够成功攀爬楼梯,一方面取决于机器人的输出性能和稳定性,另一方面的关键因素为机器人的姿态特征。通过实验发现,当机器人接近楼梯时,即进入图9(a)状态时,其前摆臂的摆角角度对机器人能否越上第一阶梯有很大影响,不仅会对越障过程中的张紧力和驱动转矩产生影响,还会影响机器人的稳定性产生影响[10]。当摆角太小,前摆臂的履带无法起到很好的牵引作用,履带机器人的运动容易不稳定,当摆角太大,履带与阶梯的接触面积就会变小,履带容易打滑,同时张紧力会增加,从而导致转矩的增加。只有当前摆臂摆角适当,刚好使前摆臂履带与阶梯具有较大的接触面积时,机器人能够很顺利地爬上第一阶梯,而这摆臂摆角与阶梯的高度息息相关。实物测试如图10所示。

图10 履带机器人攀越楼梯姿态规划测试
当机器人在第一阶梯上不断攀升,到达图9(b)状态,机器人的机身倾角会不断增加,此时若无后摆臂的支撑,机器人会以第一阶梯拐角为支点,机器人的重心会逐步接近稳定临界从而倾翻,后摆臂的下摆则增加了机器人重心的稳定界限。在前摆臂履带的接触、主履带和后摆臂履带的牵引作用下机器人成功越上第二阶梯,即进入图9(c)状态,然后机器人进入依靠主履带和后摆臂履带的连续阶梯模式,之后前摆臂放下有助于增加履带的接触面积,减小履带压强,增加履带的牵引作用,即到达图9(d)状态。当前摆臂越过最后一阶阶梯之后,前摆臂下放,可防止机器人因重心越过最后一阶阶梯而导致机器人的瞬间摆平,避免冲击力对机器人的损坏,即进入图9(f)状态。当机器人感知到机身姿态倾角的减小,即预示着机器人重心已过最后一个阶梯,到达图9(g)状态。随后前摆臂摆起,带动机器人机身重归水平,即进入图9(h)状态。将这一套越障流程应用于连续阶梯,即可实现平台间的连续通达,如图11所示。

图11 履带机器人的连续楼梯越障
4 结论
本文针对核电站非结构化环境对机器人通行能力和越障能力的要求,设计了具有较强越障能力的双摆臂履带机器人,针对不同的障碍物特征,建立了双摆臂履带机器人越障输出动力的计算模型,并针对楼梯这一障碍物特征,进行了越障姿态规划,并通过双摆臂履带机器人进行了实验验证。
