短钝外形飞行器自由振动动导数试验技术
2022-01-21宋玉辉王方剑
刘 金,宋玉辉,陈 兰,王方剑,秦 汉,董 磊
中国航天空气动力技术研究院,北京 100074
0 引 言
短钝外形飞行器一般指具有大钝头倒锥、总长度小于最大直径的飞行器,如美国阿波罗登月返回舱、猎户座飞船返回舱以及美国火星探测任务的4 个典型探测器着陆舱(海盗号、机遇号、好奇号、毅力号)[1-4]。
短钝外形飞行器再入大气层时要经历自由分子流、过渡流、滑移流、连续流等不同的大气环境,这使得飞行器周围流场结构十分复杂,导致短钝外形飞行器受力情况和飞行时的静、动稳定性变化剧烈[5-10]。一方面,短钝飞行器再入过程中的飞行速度一般由第一宇宙速度降至开伞速度(低亚声速),马赫数变化范围较大,气动特性复杂;另一方面,短钝外形飞行器纵向尺寸较小,气动压心离质心位置较近,导致其纵向稳定性变化较为剧烈,易受外界干扰。已有研究表明:短钝外形飞行器在高超声速时虽然动稳定导数数值较小,但由于压心变化较小,其动稳定导数一般不发生变化,仍是动稳定的。在亚跨声速时,短钝外形飞行器压心前移,接近质心,静稳定度下降,极端情况会出现静不稳定特性,造成迎角发散,某些状态点出现动不稳定现象,要对这一特性进行研究,就要获取这些状态点的动稳定导数数值[11-20]。
目前获取飞行器动稳定导数的方法有飞行试验、风洞试验、工程估算和数值计算等,其中风洞试验由于具有直观、可靠等特点成为获取动稳定导数的重要手段[21]。风洞试验包括自由振动动导数试验和强迫振动动导数试验。自由振动动导数试验简单、方便、更为直观,更常被用于测量短钝外形飞行器动稳定导数。在测量中,需要解决弹性支撑和低频振动模拟两个问题,这两个问题也关系到测量动稳定导数的精度。本文针对短钝外形飞行器的气动力特点,设计解决其模型弹性支撑问题的弹性铰链和解决低频振动模拟问题的轴承铰链,并在1.2 m 量级亚跨超声速风洞中进行了试验验证,试验马赫数范围为0.6~4.0。通过试验获取短钝外形飞行器俯仰动不稳定状态点,并得到俯仰动稳定导数随马赫数、迎角变化规律。另外,选取典型工况状态点进行3 次重复性试验,对试验系统的可靠性进行验证。
1 自由振动动导数试验原理
图1是自由振动动导数试验原理图。短钝外形模型通过弹性铰链安装在支杆上,模型质心与弹性铰链的振动中心重合,模型可以绕该振动中心运动。

图1 自由振动动导数试验原理图Fig.1 Principal diagram of free oscillation dynamic derivative test
试验时,整个试验系统在弹性力矩、气动恢复力矩、阻尼力矩以及惯性力矩的作用下,围绕其平衡位置作自由衰减振动。图2为典型的自由振动衰减曲线,通过获取衰减过程中的动态运动曲线,就可以得到相应的动导数值。
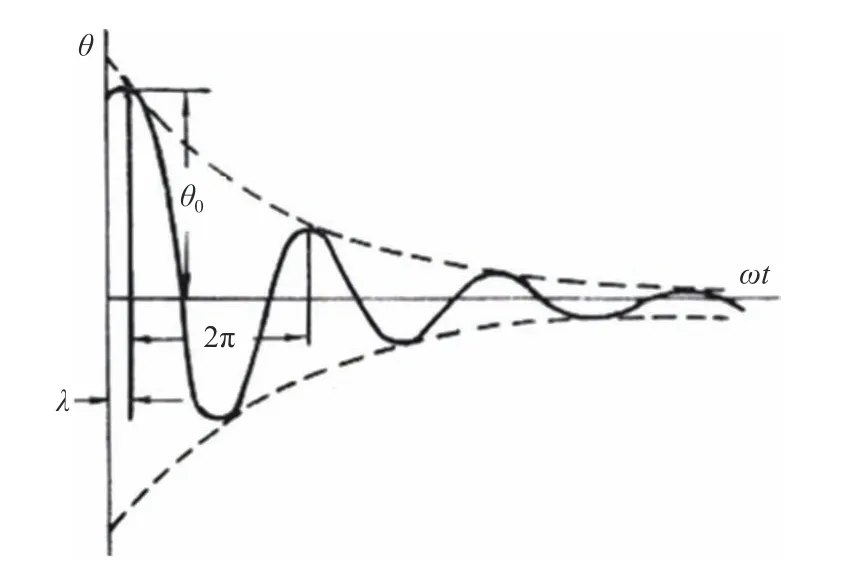
图2 典型衰减曲线Fig.2 Typical decay curve
1.1 自由振动动导数数据处理方法
运用自由振动动导数试验方法模拟飞行器飞行时受到扰动而产生角运动时的衰减过程。以俯仰方向为例,模型经过初始激励后,其俯仰小振幅运动方程可以表达为一个二阶线性齐次微分方程:

式中,Iz为 模型转动惯量,θ为角位移,为角速度,为角 加速度,C为振动系统机械阻尼力矩,为气动阻尼力矩,Kθ为 弹性铰链恢复力矩,为气动恢复力矩。
当t=0 时,θ=θ0,=0,求解式(1)可得到:

角位移衰减对数为:

式中,θm和 θn分别为模型释放后经过m和n周的振幅值,所以总阻尼导数可以表达为:


式中,q∞为来流动压,s为参考面积,l为参考长度,v∞为来流速度。
1.2 减缩频率相似模拟
动导数试验的一个重要模拟参数为减缩频率相似,即保证实际飞行器和风洞模拟的相似。实际飞行器的运动角速度采用无控状态下计算得出:ω=求得飞行器的静稳定导数Mzα、转动惯量Iz和阻尼系数 µ 即可。一般 −µ2相对为小量,初步计算一般选取
当试验模型通过弹性铰链支撑在风洞中时,根据式(1)可以求出模型在风洞中的振动圆频率:
已知实际飞行器流场速度v飞、飞行器参考长度L飞、振动圆频率 ω飞、风洞中模拟流场速度v风和模型参考长度L风,根据减缩频率相似,即可以求得风洞需要模拟振动圆频率 ω风,根据式(6)可以求得需要的弹性铰链常数K。
2 试验设备
2.1 动导数试验设备
2.1.1 自由振动动导数试验装置
图3为针对短钝外形飞行器设计的自由振动动导数试验装置,试验模型通过弹性铰链安装在支杆上。风洞启动前,驱动杆插入弹性铰链前端内腔,对试验模型和弹性铰链起保护作用。风洞启动后,通过高压气缸带动驱动杆快速向后运动,并且给试验模型施加一个初始角位移。在弹性铰链弹性支撑作用下,模型做自由衰减振动,通过弹性铰链上粘贴的应变片测量模型的振动角位移。当采用弹性铰链支撑时,通过调节角度调节杆可以实现俯仰振动初始振幅1°~3°变换;当采用轴承铰链支撑时,可以实现俯仰振动初始振幅1°~10°变换。另外,为尽量减小支撑干扰,支撑杆前端长度大于短钝模型最大直径的3 倍,支撑杆前端等效直径小于短钝模型最大直径的0.15 倍。
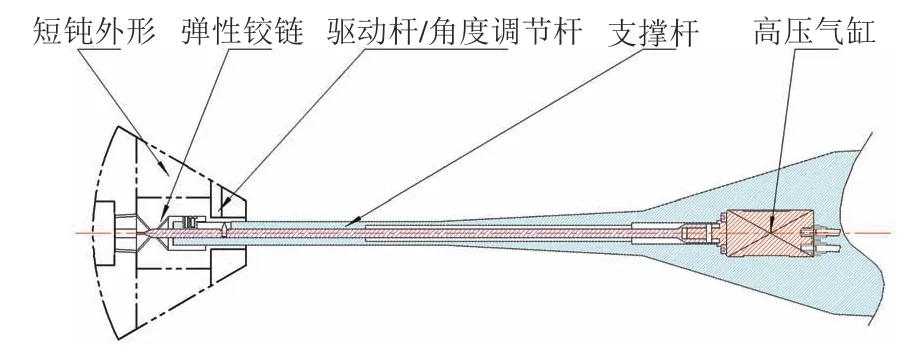
图3 自由振动动导数试验装置Fig.3 Free oscillation dynamic derivative test device
2.1.2 弹性铰链设计
短钝外形飞行器在风洞中所受气动力载荷不同于常规飞行器,其在1.2 m 量级亚跨超声速风洞中的常见载荷如表1所示。轴向力载荷是法向力的30 倍,俯仰力矩较小,因此设计弹性铰链时要考虑承受较大的轴向力载荷,同时具有较小的弯曲刚度,且适用于风洞冲击载荷工作环境。

表1 典型的短钝外形模型风洞试验载荷Table 1 Typical wind tunnel test load of short-blunt shape model
短钝外形模型长度较短,设计弹性铰链可用空间较小。图4为设计的弹性铰链,采用4 片运动引导梁加2 片矩形梁的形式,运动引导梁和矩形梁厚度一致,同时设计了铰链保护装置。
图4 俯仰弹性铰链Fig.4 Pitch elastic hinge
采用有限元仿真计算了基准梁厚度δ和每间隔0.25 mm 的梁弯曲刚度、变形角和最大应力。计算采用了四面体网格划分,总网格单元在20 万以上,固定边界条件为铰链尾端内表面固定,加载方式为前端锥面施加力矩。计算结果如表2所示,典型的应力应变如图5所示。

图5 应力分布和位移云图Fig.5 Stress distribution and deformation cloud diagram

表2 不同梁厚度下的刚度、应力、变形角Table 2 Stiffness,stress and deformation angle under different beam thickness
从表2可以看出,随梁厚度增加,弹性铰链弯曲刚度呈指数增加。由于模型气动力载荷特点,梁厚度还需考虑现有材料是否满足要求,实际需要的梁厚度根据模型模拟减缩频率反算需用梁刚度,然后根据表2插值得到弹性铰链具体尺寸。
2.1.3 低频振动轴承铰链设计
从表2可以看出,考虑到气动载荷以及安全因素,梁厚度受限,弯曲刚度不可能无限低,导致很难实现低频振动模拟,主要矛盾是在承受轴向力载荷的同时,保证俯仰弯曲刚度尽可能小。本文针对这一问题设计了轴承铰链的支撑形式。
图6为设计的轴承铰链,采用一对左右对称分布的低摩擦阻尼轴承支撑,由上下对称的厚度为0.2 mm的应变薄片测量角度运动。为在承受风洞冲击载荷时保护模型和应变薄片,在轴承铰链内部设计了保护装置。轴承铰链的弯曲刚度由应变薄片决定,当应变薄片的厚度为0.2 mm 时,其整体弯曲刚度仅为0.899 N·m/rad,比弹性铰链小很多,可以实现模型低频振动的模拟,试验结果如图7所示。

图6 轴承铰链Fig.6 Bearing hinge
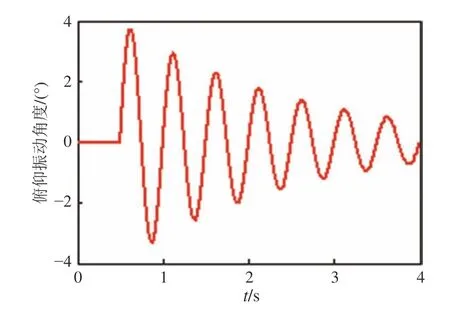
图7 轴承铰链低频振动信号模拟Fig.7 Simulation of low frequency oscillation signal of bearing hinge
2.1.4 弹性元件的地面校准
弹性铰链和轴承铰链的实际弯曲刚度要通过如图8所示的地面校准装置来测量。采用加载固定砝码的方式,利用一对激光位移传感器测量弯曲变形角度,记录变形角度与加载力矩的关系以及变形角度与应变输出的关系。通过地面校准可以确定弹性铰链的实际弯曲刚度和测量精准度。
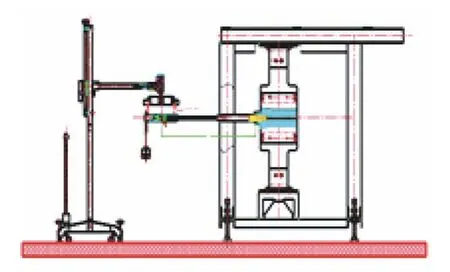
图8 地面校准Fig.8 Ground calibration
2.2 试验模型及试验风洞
常规动态试验模型设计时要在保证强度和刚度的情况下,使质量和转动惯量尽可能小,以减小惯性力和惯性力矩,提高测量精度[21]。短钝外形飞行器模型长度较短,俯仰转动惯量较小,但是考虑到减缩频率的模拟,需要适当增大模型的转动惯量,在模型头部和尾部尽可能增加质量,靠近质心位置尽可能减小质量,通过优化设计,获得满足要求的质量和转动惯量特性。
另外,短钝外形飞行器质心位置会极大地影响其气动特性,设计和加工时应使模型实际质心、理论质心、铰链转动中心尽可能重合。实际模型加工过程中总会存在一定的误差,针对这一问题,采用如图9所示的三坐标仪测量模型和弹性铰链安装后的振动中心位置,同时设计了一系列的偏心锥套调节弹性铰链振动中心与模型理论质心的相对位置。

图9 三坐标测量仪和系列锥套Fig.9 Three coordinate measuring instrument and series cone sleeve
试验在FD-12 风洞进行,具体风洞参数如下:
1)风洞类型:暂冲式、卧式高速风洞;
2)试验段尺寸:1.2 m×1.2 m(横截面),2.4 m(长度);
3)试验马赫数:0.3~4.0;
4)试验雷诺数:1.2×107~7.9×107m-1;
5)迎角机构范围和误差:–15°~25°,误差为±0.02°。

图10 FD-12 亚跨超声速风洞Fig.10 Tri-sonic wind tunnel FD-12
2.3 数据采集和运动控制
自由振动试验驱动源为高压气缸,通过电磁阀控制气缸前后运动,数据采集与气缸前后运动同时进行。基于NI LabVIEW 环境开发了一套自由振动数据采集和运动控制集成系统,如图11所示,数据采集由PXI 应变采集板卡完成,控制由PXI 继电器板卡完成,二者均安装在一个采集机箱内。当继电器板卡控制运动机构作动后,应变采集板卡采集模型运动过程中的曲线。

图11 采集系统和控制系统Fig.11 Acquisition system and control system
3 试验结果与分析
试验在亚跨声速和超声速迎角0°附近都获取了俯仰动不稳定状态点,图12为风洞试验获取的原始俯仰振动发散曲线和俯仰振动收敛曲线。

图12 典型俯仰振动发散曲线和收敛曲线Fig.12 Typical pitch oscillation divergence curve and convergence curve
图13为典型马赫数下俯仰动稳定导数试验结果与参考文献[22-23]中类似短钝外形飞行器风洞试验结果对比。参考文献与本试验均采用自由振动动导数试验方法。从图中可以看出:二者变化规律一致,均在迎角0°附近出现俯仰动稳定导数大于0 的情况,即俯仰发散;且在俯仰方向动稳定时,随迎角增大,俯仰动稳定导数数值变化不大。导致二者数值存在差异的因素有试验模型外形、弹性铰链形式、支撑装置尺寸以及风洞尺寸等。
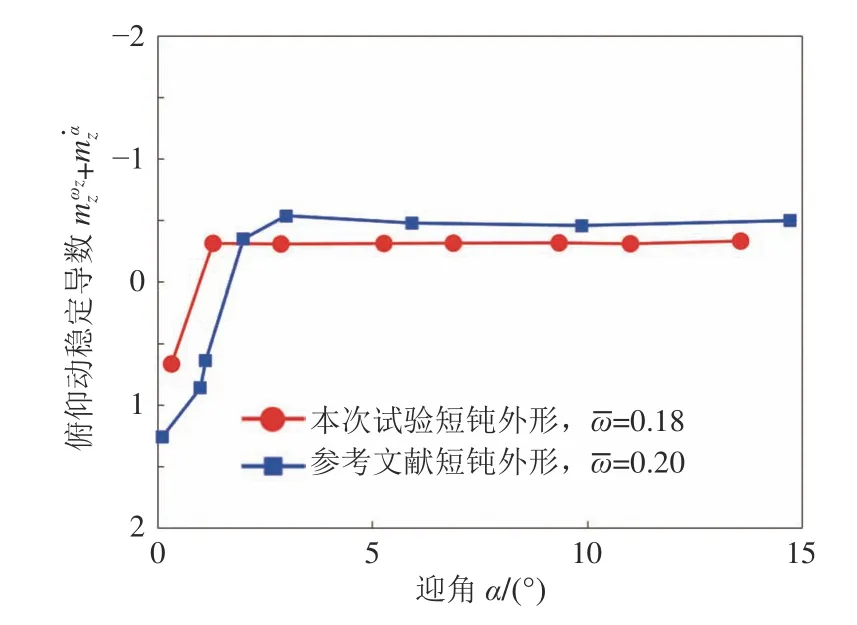
图13 典型俯仰动稳定导数试验结果Fig.13 Test results of typical pitch dynamic stability derivative
为对本试验系统的测量精度进行考核,试验还选取了典型工况进行了3 次重复性试验,试验理论迎角0°~10°。3 次试验结果及均值和标准差如表3所示,从表中可以看出,本试验系统获得的俯仰动稳定导数结果重复性精度可以控制在15%以内。
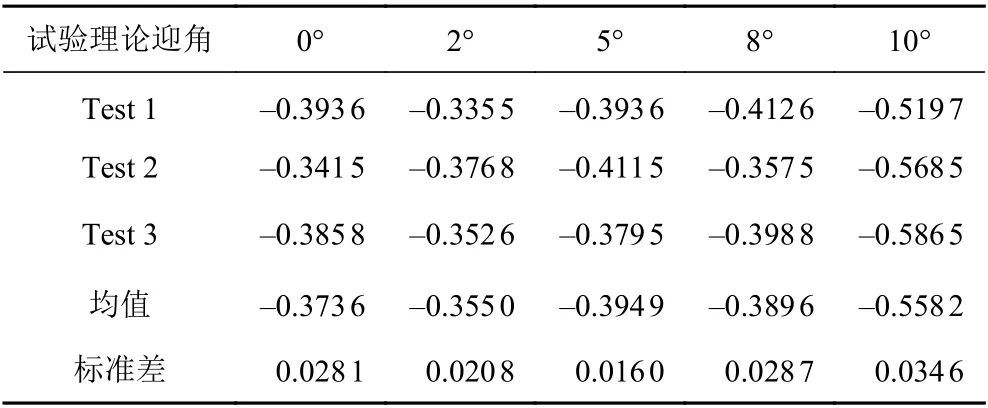
表3 三次重复性试验结果Table 3 Results of three repeated tests
另外,还进行了典型迎角下减缩频率影响试验。图14为使用两个不同刚度俯仰铰链时模型的俯仰动稳定导数随马赫数变化情况。可以看出:在亚跨声速时,减缩频率对俯仰动稳定导数结果影响相对较大;马赫数继续增大,减缩频率对俯仰动稳定导数结果影响不大。

图14 减缩频率对俯仰动导数的影响Fig.14 The effect of reducing frequency on pitch dynamic derivative
4 结 论
基于自由振动动导数试验原理,建立了一套针对短钝外形飞行器动稳定导数测量的试验装置,在1.2 m 量级亚跨超声速风洞中完成了某短钝外形飞行器的动导数测量,得到如下结论:
1)在短钝外形飞行器气动力特点下,新设计的弹性铰链能够满足模型支撑和振动需要,运用轴承铰链的支撑方式可以在风洞中模拟接近实际减缩频率的振动。
2)试验获取了短钝外形飞行器俯仰动不稳定状态点,通过3 次重复性试验,获取了典型工况俯仰动稳定导数结果重复性精度在15%以内。试验还获取了减缩频率对短钝外形飞行器俯仰动稳定导数的影响规律。