原子自旋进动检测技术
2022-01-19陈东营杨远洪
陈东营,杨远洪
北京航空航天大学仪器科学与光电工程学院,北京100191
随着物理学、现代光学、原子力学的不断进步,原子传感技术得到了迅速发展。自旋是原子的内禀属性,原子自旋包括电子自旋与核自旋,它们分别具有角动量和磁矩。由于原子自旋进动对磁场和转动非常敏感,通过检测原子自旋进动及其变化可以实现磁场或转动的高灵敏高精度测量,这是高精度原子自旋陀螺和原子自旋磁强计的基本原理。相较于光学磁力计和光纤陀螺,基于原子自旋效应的磁强计和陀螺具有超高的灵敏度和精度且有实现小型化的潜力,因而引起了世界各界的广泛关注。早在20 世纪50年代就出现了基于电子和核自旋的原子磁强计[1-2];基于核自旋角动量的定轴性,Simpson[3]提出了一种基于原子核自旋的原子陀螺仪,即核磁共振(nuclear magnetic resonance, NMR)陀螺仪;2002年,美国普林斯顿大学研究人员操控原子自旋实现无自旋交换弛豫(spin-exchange relaxation-free, SERF)态[4],基于原子SERF 态实现了高灵敏度磁场测量;2005年,该课题组又提出了基于原子SERF 态的原子自旋陀螺仪[5],获得了的角速度灵敏度。在SERF 态下,原子自旋弛豫时间长,陀螺角速度灵敏度与常规光泵浦态下相比得到了很大的提高,明显提高了原子自旋的相干性且原子系综信噪比较高。更重要的是,在SERF 态下可实现核自旋-电子自旋强耦合,形成惰性气体核自旋的磁场自补偿效果,增加了原子自旋对转动的灵敏度[5]。原子SERF 态的实现,大幅提高了基于原子自旋的精密测量和传感的能力[4-6]。
处于SERF 态的碱金属原子气室中,原子具有一致且稳定的自旋进动,在宏观上可等效为一种光学法拉第晶体[7],光的偏振状态的测量理论和技术是原子自旋进动检测的基础。原子自旋进动检测大都采用线偏光作为探测光,通过测量线偏振光经过碱金属气室后偏振面的旋转角来测量原子自旋进动的变化。原子自旋进动检测技术主要通过光学传感器和光纤传感器来实现,例如光学偏振仪和光纤干涉仪。为提高检测精度并抑制误差,研究人员提出了多种基于线偏振探测光的自旋进动检测方法,如偏振分光差分法[8-10]和偏振调制解调法[11-13]等。目前,SERF 原子磁强计被操控于SERF 态并且采用高精度偏光检测技术,已实现了约的磁场测量灵敏度[14],NMR 陀螺仪的精度也已达0.01◦/h[15],具备了实用条件;SERF 原子陀螺仪的实验室精度也已达0.01◦/h[16]。近年来,本课题组结合反射型光纤Sagnac 干涉仪和气室圆偏双折射特性,提出了一种基于圆偏振探测光的自旋进动检测技术,该技术在检测精度、抗环境干扰、小型化、阵列化等方面都有独特的优势[17-18]。光学传感技术和光纤传技术的进步推动了原子自旋进动检测技术的提升,使其向着高性能和小体积的方向发展,为原子磁强计和原子陀螺的实用化提供了支撑。
基于原子SERF 态的原子传感技术包含原子SERF 态制备和原子自旋进动检测两个重要的部分。原子SERF 态的制备是实现高灵敏度、低噪声和高稳定感测的前提,原子自旋进动检测则是实现原子传感器高性能测量的关键。本文首先简单介绍了原子自旋进动及检测原理,在此基础上围绕SERF 原子磁强计和SERF 陀螺自旋进动检测,介绍了三类典型的原子自旋进动检测技术及特点,并进行了对比分析。
1 原子自旋进动及检测原理
1.1 原子SERF 态及自旋进动检测基本原理
自然状态的原子自旋是杂乱无章的,外加磁场和泵浦光照可使其杂乱无章的原子自旋具有宏观指向,即极化。如图1 所示[19],当一束圆偏振光沿z轴入射到原子气室时,光子的角动量传递给碱金属原子,使原子沿传输光方向形成一致的自旋和进动。这使得具备高原子密度的原子气室处于低磁场环境下,采用圆偏振光泵浦,可以让原子的自旋交换频率远远大于拉莫尔进动频率,气室内原子自旋交换碰撞将出现无自旋交换弛豫,表现为极化原子还来不及退极化又回到最初的极化状态,如图2 所示。这种状态被称作原子SERF 态[20]。当线偏探测光通过SERF 态原子气室后将发生偏转,定义偏振面的旋转角为光旋角θ,它与原子自旋进动信号在检测方向(x轴)上的投影Pex的关系可以表示为[20]


图1 SERF 态原子气室及偏振探测光变化示意图[19]Figure 1 SERF vapor cell and the polarization plane rotation of linearly polarized probe light
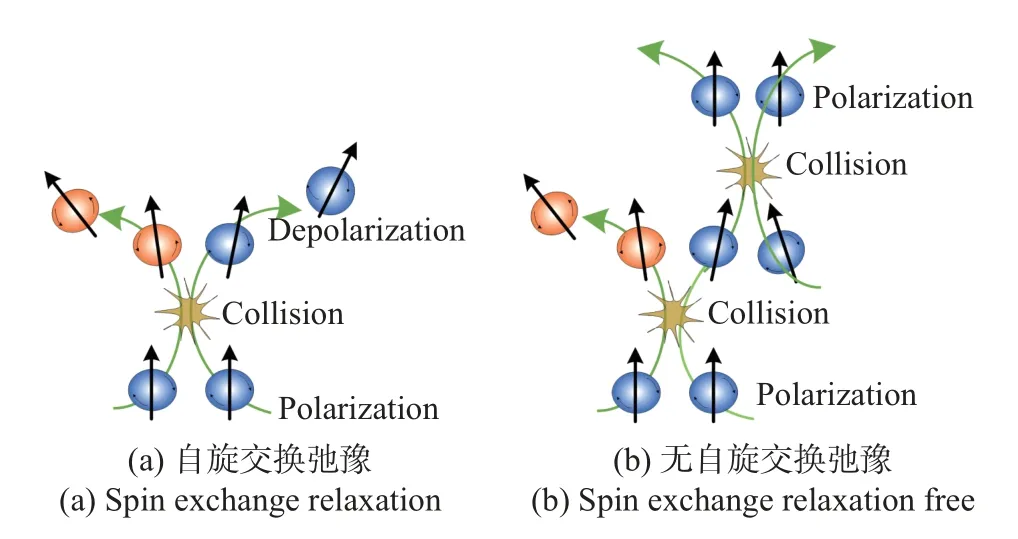
图2 原子自旋交换碰撞[20]Figure 2 Atomic spin exchange collision
式中:n为碱金属原子的饱和蒸汽密度;l为气室长度,c 为真空光速,re为电子半径;fD1≈1/3,fD2≈2/3;v为探测光频率,vD1和vD2为碱金属原子在D1、D2 线上的跃迁频率;ΓL为压力展宽系数。SERF 态原子气室宏观上可等效为旋光晶体,其旋光特性可以用等效的法拉第旋光方程描述

式中:KV为极化SERF 态原子气室的等效旋光系数。对于设定的气室,KV和l均为确定值,θ与Pex成比例关系,精确测量θ便能得到准确的自旋进动信息。KV可表示为

从式(3) 可以看出,KV与探测激光频率(波长)密切相关。以常用的碱金属钾为例,可以计算得到KV与探测激光波长λ的关系曲线如图3 所示,其中λD1= 770.1 nm,λD2=766.7 nm 为钾原子的吸收线波长,KV的峰值处于这两个吸收线的附近,为保证探测信号的强度和稳定性,需要将探测激光的工作波长(频率)选定在KV曲线峰值附件,同时需要探测激光频率足够稳定。
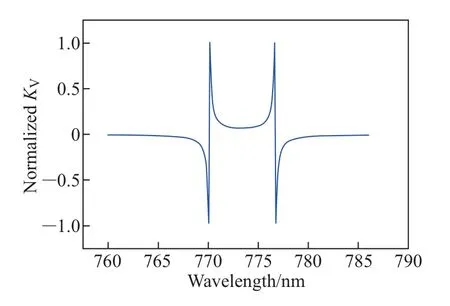
图3 钾原子气室典型的KV-λ 曲线Figure 3 Typical KV-λ curve of potassium vapor cell
1.2 SERF 原子磁强计
SERF 原子磁强计以碱金属原子(K、Rb、Cs 等)为原子源,碱金属原子气室一般包括碱金属原子、缓冲气体(4He)、淬灭气体(N2)等。如图1 所示,当沿着z轴施加圆偏振的泵浦光时,碱金属原子沿z轴被极化,形成SERF 态;当在y轴方向输入磁场By时,可采用Bloch 方程描述极化的碱金属原子的电子自旋[21]

式中:Pe为电子极化率;Q为减慢因子;γe为电子旋磁比;B为环境磁场;Rp为泵浦率;sp为泵浦激光光子角动量传递方位;Rsd为自旋破坏弛豫率。SERF 磁强计的敏感轴为y轴,探测光沿x轴输入,在小的磁场范围内,磁强计的测量方程为

由式(5) 可知,自旋进动信号在检测方向(x轴)上的投影Pex与磁场By成线性关系,通过检测Pex即可实现磁场By的测量。
1.3 SERF 原子自旋陀螺
SERF 原子自旋陀螺工作物质包含碱金属原子和惰性气体原子。图4 示意了原子自旋陀螺工作原理,λMn为核磁,B为有效磁场,S为碱金属电子自旋,Bc为补偿磁场。气室原子(K 和3He)被极化到SERF 态后,沿平行于泵浦光施加偏置补偿磁场,其值近似抵消核磁,在此条件下,由于惰性气体原子核自旋与碱金属原子电子自旋的强耦合作用,惰性气体核自旋可以跟随并补偿外界磁场的变化,使碱金属原子电子自旋所受静磁场接近零,碱金属原子进动将只对惯性旋转敏感。用Bloch 方程来描述惯性测量装置中电子自旋和核自旋的极化率的变化,电子、核子自旋及其耦合关系可用如下方程描述[22]:
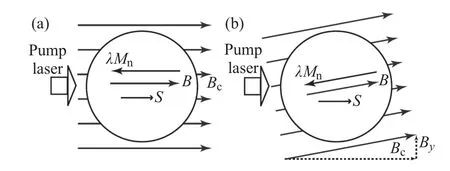
图4 SERF 原子陀螺仪工作原理示意图[5]Figure 4 Operation principle of SERF atomic gyroscope

式中:Bn为核子自旋磁场;Be为电子自旋磁场;L为光位移;Rd为检测激光光泵浦率;Pn为核自旋极化率;γn为核自旋旋磁比;Ω为载体相对惯性系角速率;sd为检测激光光子角动量传递方位;为核子自旋泵浦率;为电子自旋泵浦率;为电子自旋总弛豫率;为核子自旋总弛豫率;其他符号与式(4) 相同。设z轴为泵浦光方向,x轴为检测光方向,y轴为转动敏感检测方向,在小转速范围内SERF 自旋陀螺的测量方程为[22]

上式表明:自旋进动信号在检测方向(x轴)上的投影Pex将与在y轴输入的转动速度Ωy成线性关系,通过检测Pex可实现转速Ωy的测量。
结合式(2)、(5) 和(7) 可以看出,原子自旋进动的测量是通过测量线偏振探测光通过原子气室后的旋转角即光旋角θ实现的。
2 原子自旋进动检测技术
2.1 偏振分光差分法
偏振分光差分法是一种经典的线偏振光旋角检测方法,其基本光路结构(上部分)和偏振态演变(下部分)如图5 所示。半波片(HWP)用于精确调入射到偏振分光镜(PBS)的线偏光的方向,使之与PBS 两偏振主轴都成45◦夹角,入射线偏光被分成两束相互垂直的偏振光并由两个平衡探测器接收。设光旋角为θ,对两个探测器接收信号I1和I2取差和求和,可得如下测量方程

图5 偏振分光差分检测示意图Figure 5 Differential detection with polarization beam splitter

在θ较小的情况下,输出与光旋角成线性关系且与光源功率无关。偏振分光差分法结构简单,能够消除光强波动和其他共模噪声的影响。尽管线性测量范围有限,但由于原子自旋进动引起的光旋角一般较小,适合原子自旋进动检测,这是使用最早的一种原子自旋进动检测方法。1962年,Gozzini 等[23]首次将差分检测法用于原子自旋检测中,现已成为SERF 原子陀螺和SERF 磁强计的最常用检测技术之一[24-26]。2019年,美国Twinleaf 公司基于此技术研发出微尺寸双轴SERF 磁强计[27],如图6 所示,其尺寸为Φ1.6 cm×15 cm,灵敏度为带宽为100 Hz,磁场测量范围为±100 nT。

图6 Twinleaf 公司的原子磁强计[27]Figure 6 Atomic magnetometer by Twinleaf
然而,偏振分光差分检测工作在直流和低频段,低频噪声和1/f 噪声较大。为此,研究人员引入了调制技术,通过调制获得周期变化的差分信号再进行相关解调,可有效抑制检测噪声。2018年,Yao 等[28]采用声光调制器(AOM)实现偏振差分信号调制,如图7 所示,通过锁相放大器提取一次谐波信号实现了SERF 磁强计光旋角的测量,相较于其他技术,该技术获得了较好的噪声抑制效果。2019年,刑丽等[29]提出了采用液晶相位延迟器(LCVR)实现相位调制,如图8 所示,PBS 为偏振分束器、HWP 为半波片、AOM 为声光调制器、QWP 为1/4 波片,使SERF 原子陀螺精度达到0.08◦/h,该方案减小了调制器的体积、降低了光路调节的难度。
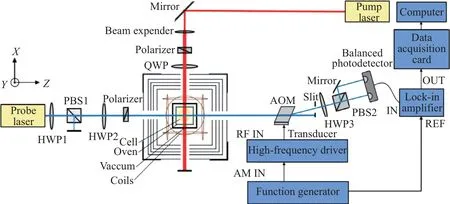
图7 采用AOM 的偏振分光差分检测的SERF 磁强计结构[28]Figure 7 Structure of SERF magnetometer with polarization differential detection by using AOM

图8 采用LCVR 的偏振分光差分检测系统结构[29]Figure 8 Structure of polarization splitting differential detection system based on LCVR
2010年,美国Sandia 国家实验室Johnson 等[30]提出了一种光纤耦合反射型的SERF原子磁强计方案,如图9 所示,ISO 为隔离器、HWP 为半波片、GL 为格兰棱镜、PD 为探测器,不同于常规的泵浦和探测光路相互垂直的结构,采用特殊设计的光学器件,实现了泵浦和探测光共光路传输,探测激光经过反射后由偏振分光差分模块探测。检测光束两次通过原子气室,增加了光程,提高了检测灵敏度,同时减小了整体体积。该课题组将该方案用于脑磁图测量,实现了小于的磁场灵敏度检测。2013年,该课题组设计了两个小体积磁强计,第一次实现了两通道的脑磁图的测量[31],为阵列化SERF 原子磁强计的研制和应用提供了实用的技术和方案。
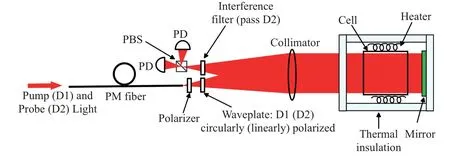
图9 光纤耦合反射型磁强计[30]Figure 9 Reflective atomic magnetometers with optical fiber coupling
偏振分光差分检测模块的核心器件为PBS 和平衡探测器,都属于易于阵列化配置和集成的器件,现有研究和应用表明,该技术非常适于原子自旋传感器阵列应用。在加入偏振调制环节后,也能实现高精度检测。如式(8) 所示,该技术还存在测量范围有限和线性度差的不足。
2.2 偏振调制/解调法
偏振调制/解调法基于马吕斯定律[32],通过设置偏振光调制模块,实现光旋角的调制/解调检测,图10 描述了其基本结构(上部分)和偏振态的演变(下部分)。设通过调制器后线偏振面的角度调制为α=Amcosωt,Am为调制幅度,ω为调制频率,碱金属气室引入的光旋角为θ,且θ ≪1,Am≪1,探测光强可表示为[20]
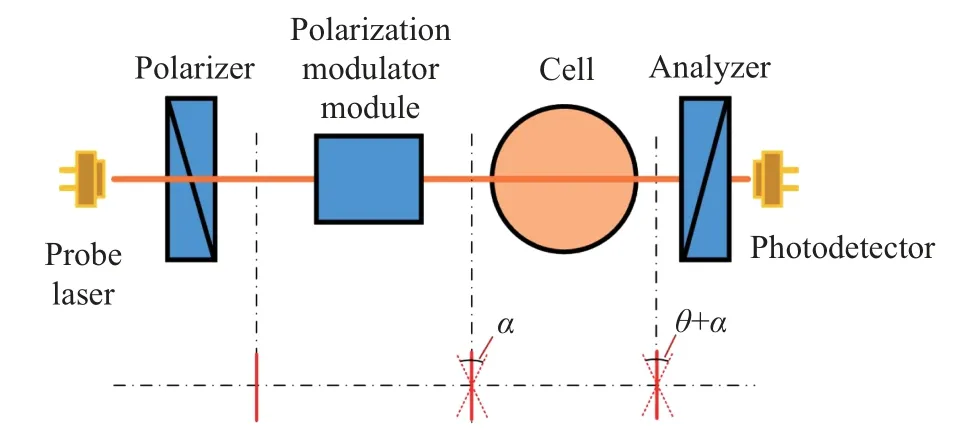
图10 偏振调制解调法原理图Figure 10 Schematic diagram of polarization modulation/demodulation detection

忽略高阶小量,通过锁相放大器解调出一次谐波,可得到近似的测量方程

从上述推导过程可以看出,偏振调制解调检测需要待测光旋角θ和调制幅度Am都足够小,即θ ≪1,Am≪1,测量范围较小、线性度较差。而且光源、调制器等的稳定性会直接影响光旋角的检测性能,这是这种检测技术必须重点解决的问题。目前可用于偏振调制的常用调制器有Faraday 调制器、光弹调制器(photo-elastic modulator, PEM)、电光调制器(electro-optic modulator, EOM)等。
Faraday 调制器基于Faraday 磁光效应来调制线偏光的偏振方向,调制频率一般为kHz量级。1990年,Wolfenden 等[33]首次将Faraday 调制器应用于微弱光旋角检测,有效提高了检测信号的信噪比,如图11 所示。2002年,Allred 等[4]在第一台SERF 原子磁强计中使用了基于Faraday 调制器的偏振调制解调法,如图12 所示,调制幅度为2◦,调制频率为3 kHz,实现了的灵敏度。2005年,Kornack 等[5]搭建的第一台SERF 陀螺样机也采用了相同的检测方法。为了抑制Faraday 调制器工作过程中产生的较大热量和机械噪声,该课题组还对Faraday 调制器进行了优化设计[34]:优化了线圈和µ-金属磁屏蔽罩结构、采用了水冷温控技术等。2014年,万双爱等[35]利用自然旋光效应设计了双光束闭环Faraday 调制方法,如图13 所示,有效抑制了Faraday 调制器温度变化引起的漂移和噪声。
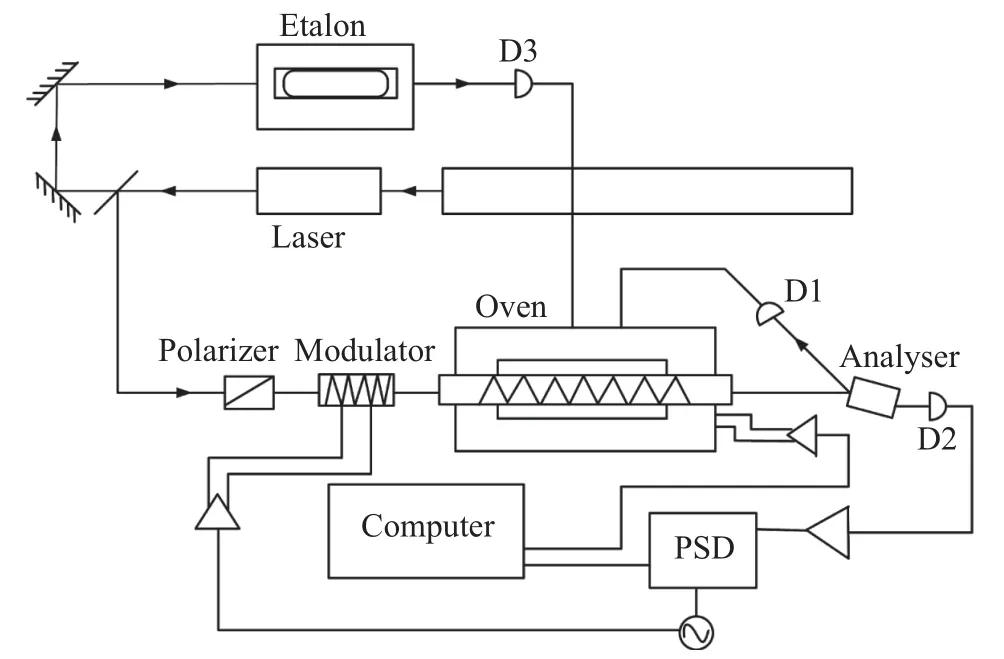
图11 微弱光旋角检测装置图[33]Figure 11 Weak optical rotation angle detection device

图12 采用Faraday 调制的SERF 磁强计实验装置[34]Figure 12 SERF magnetometer with Faraday modulator

图13 用于SERF 磁强计的双光路闭环Faraday 偏光调制/解调方案[35]Figure 13 Two-beam closed-loop Faraday polarization modulation/demodulation scheme for SERF magnetometer
光弹调制器(PEM)利用电驱动压电材料产生机械力改变光学材料(如熔石英)的双折射,基于光弹效应实现光学材料中传输光偏振态调制,配合1/4 波片可实现线偏振面的偏转角度的调制[36]。1975年,Modine[37]首次将PEM 用于光旋角偏振调制/解调检测中。随后基于此技术,Wu 等[38]实现了碱金属气室的Fardaday 旋光特性的研究,Kornack 等[39]设计基于PEM 的偏振调制/解调检测实现SERF 磁强计超高灵敏度探测,如图14 所示,灵敏达PEM 检测法可以在很大程度上提高检测信噪比,但是PEM 调制器会受到自身产生的热量和振动的影响,引入共振频移,从而导致振动幅度不稳、电效率降低等问题。为了解决这些问题,Duan 等[40]于2015年提出了通过提取探测信号的二倍频信号进行反馈控制的方法,如图15 所示,有效降低了光源功率波动和光路损耗变化的影响。2017年,该课题组通过增加进入气室的激光功率监测环节[41],有效抑制了光路的共模噪声和误差干扰,将SERF 原子陀螺的灵敏度提高了约1 个数量级。2019年,Quan[42]等提出了一种双闭环控制方案,实现了PEM 谐振频率跟踪和调制幅度控制,较好地抑制了PEM 调制位相的波动问题。

图14 采用基于PEM 的SERF 磁强计[39]Figure 14 SERF magnetometer with PEM
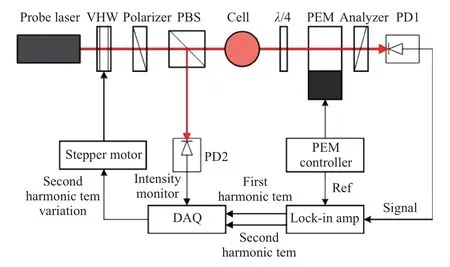
图15 采用PEM 的稳光强方案[40]Figure 15 Light intensity stabilization scheme with PEM
电光调制器(EOM)利用晶体的电光效应实现其中传输光的相位、幅度和强度的调制[43],配合1/4 波片实现了线偏振光偏转角度的调制。2016年,Hu 等[44]为了解决Faraday 和PEM 调制器温度漂移等问题,采用精度较高、相位延迟稳定的电光调制器,实现了偏振调制/解调光旋角检测,获得了的磁场测量灵敏度,实验装置如图16 所示。探测激光器的频率漂移是影响检测性能的重要因素,为了提高激光器的频率稳定性,该课题组基于检测系统输出的二倍频信号实现了激光器的稳频控制,频率稳定性达30 MHz/0.5 h[45]。

图16 采用基于EOM 的磁强计[44]Figure 16 Magnetometer with polarization modulation/demodulation scheme based on EOM modulation
偏振调制/解调自旋进动检测技术易于实现,适合实验室研究。但由于调制器本身存在较多不稳定性因素,面向超高精度和高稳定性的现场应用要求,往往需要引入更复杂的测控手段,这是限制其实际应用和进一步发展的主要原因。
2.3 圆偏光干涉差分法
基于偏振光学理论,偏振态可以用本征矢量的任意标准正交基来表征。线偏振光可由左右旋圆偏振光表征,因此采用圆偏振光也可实现极化气室原子进动的检测。基于这个思想,本课题组于2015年发明了圆偏光干涉差分法自旋进动检测技术,并获得了中国发明专利[46],在2019年报道了基于圆偏光干涉差分法的光纤原子自旋进动检测技术研究成果[17-19]。理论研究表明:不同于基于线偏振探测光的自旋进动检测技术,采用左右旋圆偏振探测光,可以通过检测左右旋圆偏振探测光的位相差实现自旋进动的检测;采用这种差分检测的方法,左右旋圆偏振光经过极化气室后的位相差是采用线偏振探测光产生的光旋角的2 倍,基于圆偏光实现原子进动检测不仅可达到更高的灵敏度,还可以有效抑制或消除各种干扰因素对测量结果的影响。圆偏光干涉差分法的磁场检测灵敏度极限为满足磁场和转速的微弱信号的检测需求[47]。
基于圆偏振探测光的光旋角检测方案的光路部分如图17 所示[17],LS 为光源、Cir 为环形器、P 为起偏器、PM 为相位调制器、PMF 为保偏光纤、Col 为准直器、QWP 为1/4 波片、R 为反射镜、PD 为探测器、Lock-in 为锁相放大器。该光路与基于Sagnac 干涉仪的反射型电流互感器类似。起偏器的保偏尾纤和相位调制器的保偏尾纤满足45◦对轴,从而将线偏振光均分为两个正交偏振模式。这两个正交的偏振模式经相位调制器调制后分别沿保偏延迟光缆的快、慢轴传输,经相位延迟器后转换为左、右旋圆偏光,经扩束器扩束后进入原子气室,左旋和右旋圆偏光产生相位差。经反射膜反射后沿原光路返回,反射光再次经过原子气室后,位相差加倍,在起偏器处发生干涉,经环行器耦合进光电探测器实现光电转换。可以看出,光在同一个光纤光路中传输具有较好的互易性。准直器前光路为全光纤光路,可以实现高度集成。两个圆偏光各自相位变化为光旋角的2 倍∆φ= 2θ,它们之间的相位差为4θ,其输出干涉信号表示为

图17 用于原子自旋进动探测的光纤Sagnac 干涉仪系统[17]Figure 17 Sagnac interferometer system for atomic spin precession detection

式中:I为入射到探测器的光强;φ(t) 和φ(t −τ) 为相位调制器的调制相位;τ为渡越时间。将该技术应用于SERF 磁强计,如图18 所示,采用开环检测方式实现了高灵敏磁场测量[17]。采用正弦波位相调制和解调电路,光旋角的测量方程为

图18 SERF 磁强计示意图[17]Figure 18 Schematic of SERF magnetometer

式中:J1为贝塞尔函数;K为转换系数;φ0为正弦波位相调制幅值;ωm为正弦波位相调制频率。采用该技术为探测模块设计带来了独特的灵活性,有利于集成和阵列化。为了验证该方案的实用性,还研究了环境温度等因素的影响,结果表明:检测光路和系统对环境温度和扰动不敏感,已具备工程应用条件。
为进一步提高性能、解决其他方法测量范围有限的问题,采用光纤陀螺类似的闭环检测方案并应用于SERF 陀螺[18],如图19 和20 所示。在闭环工作状态条件下,输出数字量与光旋角成较理想的线性关系,如下式:

图19 闭环光纤干涉仪检测方案[18]Figure 19 Closed loop optical fiber interferometric detection scheme

式中:KD为闭环检测系统的转换系数。基于集成检测系统开展了SERF 陀螺响应特性研究,在输入角速度较大时,SERF 原子陀螺的响应为非线性;基于理论和实验结果获得了SERF原子陀螺的通用测量方程为

当输入角速度较小时,忽略高阶小量可以得到式(5) 描述的方程,即式(5) 是本方程的特例。

图20 SERF 原子陀螺实验系统[18]Figure 20 Experimental system of SERF atomic gyroscope
由于处于SERF 态的原子气室具备典型的旋光特性,基于圆偏振探测光的自旋进动检测技术理论上更适合自旋进动的检测。成熟的光纤陀螺和电流互感器的相关技术解决了左右圆偏光的位相差高精度检测问题,圆偏光干涉差分法结合反射式工作模式,为原子自旋进动提供了一种实用的检测技术。该技术具备阵列化、集成小型的化潜力。采用光纤传输使其还具有独特的多路遥测能力。目前的工作主要集中在原理和技术验证,还需进一步研究结构优化、参数优化和控制、器件和材料选取等以实现更高的性能,并推动其工程实用进程。
2.4 小 结
三种原子自旋进动检测技术的特点和应用潜力如表1 所示。从表1 可以看出,这三类检测技术均能较好满足实验室条件的原子自旋检测要求,其中偏振分光差分法和圆偏光干涉法在实用化、阵列化和集成化等方面具有明显的优势,在原子自旋传感器的实用化研制方面具有较高的潜力。

表1 三种原子自旋检测方法对比Table 1 Comparison of three methods of atomic spin detection
3 结 语
本文针对SERF 态原子自旋进动的检测技术的发展情况,介绍了目前主流的三种原子自旋进动检测技术并进行了特性考察和分析,其中偏振分光差分法和圆偏光干涉法在实用化、阵列化和集成化等方面具有明显的优势。随着量子传感技术的迅速发展,特别是中国对量子传感技术的重点支持和牵引,加快了原子传感器从实验室走向实际应用的步伐。为了实现原子自旋传感器的工程应用,在自旋进动检测技术方面,除了开展更深入的理论和机理研究外,还需要加强高性能关键器/部件、关键参数控制技术和阵列集成技术等的研发,进而形成实用的高性能磁强计和原子陀螺产品。
