折纸机构及机器人应用研究
2022-01-19罗浚雄侯浩宇黄泽园李端玲
罗浚雄 张 萌 侯浩宇 黄泽园 李端玲
(北京邮电大学,北京,100876)
0 引言
折纸是一种通过对二维平面进行折叠,将其转变为三维立体的变形方法。它是一项源远流长的东方艺术,也是融合了数学、机械、材料等多门学科的新兴科学。近年来,折纸机构因具有良好的伸缩特性和迅速的控制响应,在工程领域,尤其在机器人方面,逐渐被广泛应用。
1 折纸的理论化过程
折纸起源于公元1~2世纪。最初,折纸只是用完整的纸张,不借助裁剪、粘贴的民间手工艺术,通过折叠弯曲的手法塑造各种空间造型。[1]19世纪末,折纸技术在日本实现真正的突破。一个名叫吉泽章的日本人自1930年起就不断创作折纸,并将该门技术提升到一个新的层面。他提出了“湿折法”,与美国人Sam Randlett发明了“吉泽章-Randlett系统”(图解折纸术语)。后来,随着折纸的设计不断复杂化,折纸科学应运而生。到本世纪,许多数学家、工程师和科学家开始不断探索折纸发展新方向,他们将艺术折纸中的传统几何与折法进行参数化,结合现代材料,开发新结构和设备,进而出现了折纸工程学。
尽管机械工程一直关注允许组件间相对运动的装置,在某种意义上可以认为是折叠的,但机械工程折纸是最近的发展,它带来了创新的和有用的成果。
现在可以有效地分析折纸的设计逻辑,折叠机构是一维,平面形状是二维,多面体是三维。折纸术是利用折页来解决工程问题的方法。刚性折纸把折痕当作铰链,把折痕间的材料当作刚性介质,以限制折痕在折叠过程中弯曲或变形。
以此为基础,不同的折纸方式可以衍生出很多有意义的折纸机构。刚性折纸可通过沿预定折痕的折叠实现在不同状态之间的连续运动,在成型过程中,变形只发生在折痕区域,而主体板面不发生扭曲或拉伸等变形。刚性折纸结构凭借它良好的折叠特性被大量用于机器人的设计中。
2 典型的折纸机构基本原理
为了更方便地介绍折纸机构的基本原理,这里先引入折纸中的基本技法——山折(Ridege Fold或Mountain Fold)和谷折(Valley Fold)。
山折指手向后折叠,进而形成山峰形状的折法;谷折指手向前折叠,进而形成山谷形状的折法。
“山”和“谷”是折痕设计的重要概念,在折纸的展开图,也就是折痕图(Crease Pattern)中,常常以不同颜色的线条表示。如图1所示,一般以红线表示山折,青线表示谷折。

图1 折痕图中的“山”和“谷”
2.1 三浦折叠折纸机构
三浦折叠是由三浦公亮发明的折叠法。该方法沿着对角线拉开三浦折纸模型实现展开,再逆向推入实现折叠(见图2)。

图2 三浦折叠
这种折纸机构的显著特点是可有效减小体积,增大能量密度,节省空间,且避免折叠和展开的过程中造成能量损耗。[2]
2.2 “魔球”折纸机构
“魔球”折纸机构的显著特点是,可以使折痕密铺结构从长圆柱变形为扁平圆盘,从而实现3种变形形态(见图3)。

图3 “魔球”折痕设计
2.3 吉村模式折纸机构
吉村模式折纸机构的显著特点是,折痕图中的谷线垂直于该圆柱体的轴向,该方法常用于吸能结构的设计,其失效方式是通过轴向压缩实现模型收缩(见图4)。

图4 吉村模式
2.4 三角形(对角线)螺旋折纸机构
三角形(对角线)螺旋折纸机构的折痕设计常见于柱体折叠,其折痕设计的显著特点是常用于吸能结构的设计(见图5)。

图5 三角形(对角线)螺旋折痕设计
与吉村模式不同的是,该方法采用对角线型折痕样式的圆柱体,其失效方式是通过扭转实现模型收缩。
3 折纸机器人的进展与成果
随着折纸科学的不断发展,折纸机构在机器人领域逐渐应用起来,加上新材料的不断出现,折纸机器人研究取得了一定的进展和成果。下面对近年来的几款折纸机器人进行介绍和分析。
3.1 “郁金香”机械手
当提到机械手这个词时,人们的脑海中浮现的大多是爪子的模样,然而,麻省理工学院(MIT)计算机科学与人工智能实验室(CSAIL)的教授Daniela Rus制作了一款像是一朵纸折出的郁金香花一样的机械手[3](见图6)。

图6 郁金香机械手
这款机器人模仿折纸“魔球”完成机械手抓取的功能。“魔球”由一张长方形纸折成,可以在圆柱体和球体形态中自由切换,转换成机械手,则变为半球形和伞形的切换。
该机械手抓取器呈空心圆锥状,由16根骨架、一个用于夹持的连接器以及外层的轻质表皮组成。夹持器由连接管连到机械臂上,并加入了真空管。当真空管将夹持器中空气抽出,夹持器的表皮便会折叠,变成一朵郁金香的样子(见图7)。
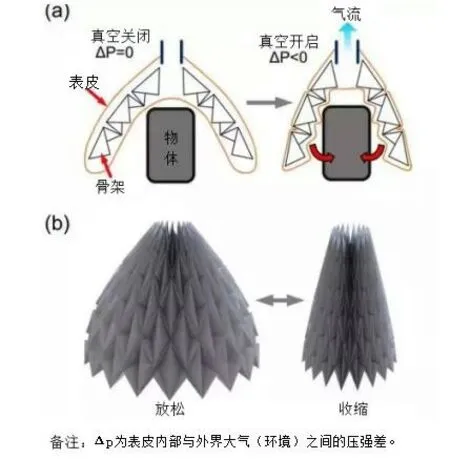
图7 郁金香机械手结构原理图
通过这样的操作,机械手可实现抓取的功能,且不会破坏脆弱的物体。实验显示,这款郁金香机械手最高可抓取质量约4lb(1.8kg)。
该机械手的优势在于,它可以从多个角度去抓取物品,且可以抓取并放下其他机械手无法抓取的各种东西,包括酒瓶、花椰菜、葡萄、鸡蛋,甚至还包括鞋子、胶带、杯把手等不容易抓稳的物品(见图8)。虽然目前该机械手还处于测试阶段,能够抓取的物品种类有限,重量也不算太大,但是它已经展示出了对非常规形状物品的抓取能力。

图8 郁金香机械手抓取物品
当然,该机械手也存在不足,比如它很难抓取平躺在桌面上、缺乏着力点的东西,但科研团队表示,将来可能通过增加机器视觉来解决抓取角度和方向的问题,让抓取更方便。
3.2 “软”弹簧折纸机器人
2020年1月,宾夕法尼亚大学的一个研究团队发表论文,提出一种通过可编程的柔性折纸机构来克服机器人动态灵巧性挑战的方法,制造了一款名叫REBO的“软”弹簧折纸机器人(见图9)。

图9 REBO“软”弹簧折纸机器人
REBO通过折纸波纹管的折痕模式实现重复的动态运动,从而实现弹性轴向顺应性。
REBO的折叠模式是将矩形单元排列成若干行和若干列,然后左右列粘在一起形成管状结构(见图10)。这种折纸结构具有存储势能的能力,类似于多稳态的“弯曲吸管”设计。

图10 REBO折叠模式
这种折纸机构不但可以将压缩时产生的势能储存在折痕当中,还能储存在其表面,从而使该机构更加牢固。[4]
设计人员可以通过改变设计的大小和等几何参数,操纵设计所需的变形弯曲和压缩(见图11)。也就是说,仅仅通过改变几何形状,就可以控制刚度设计,从而设计出具有可变刚度的弹簧状结构。

图11 REBO截面图及其集合参数
REBO机器人由(双层)制动器、直流电机、滑轮系统、力传感器系统、集成感测和控制微处理器等组成(见图12)。为了使弹射物被弹得更高,在每次击打后,REBO会迅速回到预压缩位置,等待下一次的击打。每次击打,预留收缩力可将更多能量注入到弹射物中,物体便会弹得更高。

图12 REBO组成部分
基于波纹管的折纸模式REBO“软”弹簧折纸机器人,不仅降低了材料重量,减少了能量损失,而且实现了简易可控的刚度设计,在很多领域都可以灵活调节,适应运行。
3.3 柔性抓手RAD
为了探索人类无法亲身抵达的海底世界,科学家们设计出许多小发明,其中有一款柔软抓手RAD(见图13),可以将海底超级脆弱的生物抓取带回陆地。
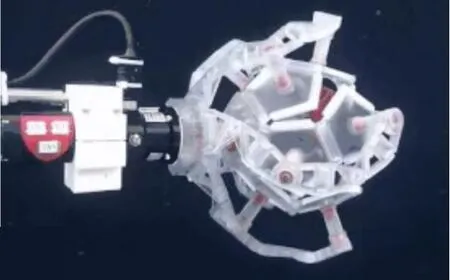
图13 柔性抓手外形
这是一款以折纸为灵感的机器人抓手,它看上去像一个5瓣的花朵,当抓手的5个花瓣关合时,从外形上看是一个中空的十二面体(见图14),它能够在抓取猎物时迅速关合,并且给猎物留下足够的空间。这种抓取机构原理简单,但是效果非常好。
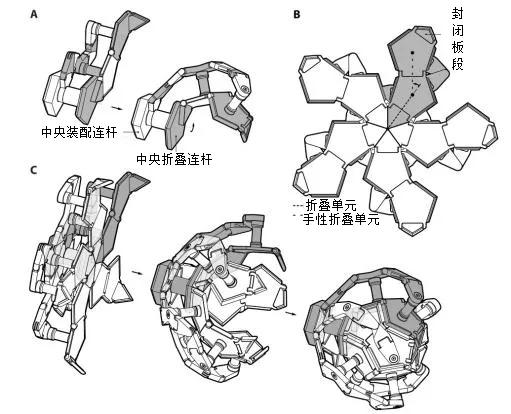
图14 柔性抓手结构
这个抓手最神奇的地方是,受到折纸的启发,机器人的5个花瓣附着在一系列的旋转接头上,仅需要一个电机就能让整个结构围绕其关节旋转,将抓手折叠成中空的12面体。[5]这是很简单的折纸原理,但是却起到了快速高效闭合的效果。
未来,RAD还可以配备内置摄像头、触摸传感器甚至DNA测序技术,其对于探测海底世界有深远的意义。
3.4 可重构微型折纸机器人
根据折纸原理,麻省理工学院计算机科学与人工智能实验室的团队还推出一种无需外接电力、十分微小的折纸机器人(Untethered Miniature Origami Robot)。[6]
该折纸机器人的外形好似被揉成一团的纸张,展开之后的大小只有1.7cm2。但是该机器人却可以完成一系列的任务,如折叠、行走、游泳、搬运小型的障碍物等等。据官方数据,这个小家伙可以扛起0.6g的行李,同时能够推动更重的物体爬坡等。
另外,特殊材料的应用使得该折纸机器人能够在完成指定任务之后进行自行溶解,也就是它能够在丙酮溶液中溶解掉。
该折纸机器人又被称作是可重构机器人,其设计者受到传统的折纸手艺的启发,最初形态是一组由三角形模块拼接而成的正方形纸片状薄片,和水弹原理有些相似,在受到热刺激之后,能够完全自动地进行自我折叠,最终达到如图15所示的形态。

图15 可重构机器人变形过程
在完成折叠之后,机器人的驱动力来自于自身后部的磁力电机,该电机由电磁圈动力系统构成,一旦磁场发生变化,机器人就会做出相应的动作。
当然,该机器人也并非是有磁场变化就会无目的地乱动,机器人设置有一个15Hz的频率开关,扰动超过了限制的阈值,电机才被触发,机器人的整个身体就会颤动起来,通过震动向前行进,类似于偏心轮的重心偏移使得机器人可以发生位置的移动。而且,这一切都需要依赖于机器人本身特殊的折叠形态,当机器人没有进行过折叠的时候,无论磁场怎样引导,机器人都不会动作。
此外,该机器人在后期还被设计了更细致的外观:一种具有类似铲车的纸片触手。这样,机器人能够更加准确地搬运物体,也能让物体在搬运过程中更不容易脱落。
在MIT同一个实验室中,项目主管Daniela继续大开脑洞。因为每年有数千名孩子不小心吞下玩具电池等异物,所以,该主管引导设计出胶囊大小的机器人,原理和微小折纸机器人类似,外层是香肠肠衣,内里是折叠机器人。这样的机器人能进入胃里把吞进去的异物消化掉,而机器人本身则可以通过消化系统降解,以免除孩子开刀的痛苦。
3.5 “双模”变形折纸结构
2019年11月,一支由韩国首尔国立大学(Seoul National University)、葡萄牙瑞比克夫-尼格勒基金会(The Rebikoff-NiggelerFoundation)、美国哈佛大学(Harvard University)等学者组成的研究团队,受到一种名为吞鳗(见图16)的鱼类启发,结合折纸以及气动膨胀软体机器人,提出了能够实现极端变形的“双模”变形折纸结构。[7]这种结构可以从极小体积进行折纸展开,经过拉伸碰撞,最终实现极端变形,大大综合并增强了传统折纸结构和气动软体机器人的特点。

图16 吞鳗
基于这样的折纸结构,该研究团队发明仿生吞鳗机器人(见图17)。他们设计出“软体骨架支撑”,并通过高弹性硅胶薄膜连接起来,随着流体充入,该结构首先沿着折纸方向展开,然后在整个结构内产生薄膜的拉伸膨胀。

图17 仿生吞鳗机器人
再者,基于三浦折纸结构,该研究团队发明了仿生触手(见图18)。

图18 仿生触手
三浦折纸结构结合气动膨胀,仿生触手能够由扁平折叠状态瞬间展开为大体积的弯曲状态,并通过气动驱动展开,通过折纸引导展开方向。
另外,基于吉村折纸结构,该研究团队发明了万能软体抓手(见图19)。该抓手不仅能从扁平折叠状态展开为一个圆柱体,而且能进一步气动拉伸膨胀,变成球体。这种结构使得抓手在自适应抓取方面表现十分优异。
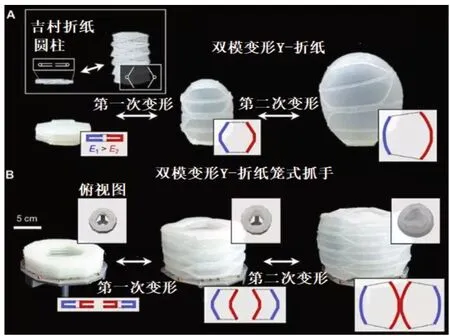
图19 万能软体抓手
总之,“双模”变形折纸结构既实现了该结构沿折纸方向保证极小体积,又使得折纸结构展开后可以进一步发生极端变形,实现了通过折纸展开和薄膜拉伸以响应流体压力的准序列行为。正如设计者所说,这一设计原则可以为设计仿生、适应性和极端变形系统提供指导。
4 结论与展望
如今,折纸机构因其折展比例大、设计成本低、控制较稳定等特点,在工程领域应用得越来越广。通过本文介绍折纸的理论化过程,可以看出,折纸正从艺术向工程延伸,折纸科学的研究越来越深入。
从折纸机器人的进展来看,经典的折纸机构,例如三浦折叠、吉村模式等,在机器人领域发挥出其优越的折叠性能,能够满足相应机器人的功能设计实现。除此之外,新的折纸机构也在不断适配机器人构型和新材料性能的过程中不断涌现。
目前,基于刚性结构的行走机器人、可变轮径机器人、机械手和爬行机器人仍然占据主导地位,同时也在不断创新。近年,随着软体机器人的发展,以折纸机构为“骨骼”,配合以真空或流体为“肌肉”的驱动型折纸机器人构型,因其控制精度高和响应快的特点,越来越受到关注。另外,折纸机器人也因新材料诞生等原因,向着微型化方向发展。
通过分析折纸机器人研究进展,可以看到,折纸机构的应用在一定程度上实现了机器人的快速折展或稳定驱动,故在机器人领域还应该有更广阔的发展空间。例如,通过仿生建模或原理研究,可以进一步对折纸机构的折痕进行创新,为折纸机器人带来更优越的折叠性能和变形形态。再例如,通过新材料的应用,可以开发出与“4D打印”概念相似的四维折纸机器人,这样的机器人,能够在声、光、热、力、电等外界激励下,实现变形,甚至在周期性的激励下,实现驱动。
最后,笔者希望,本文对折纸机构和折纸机器人进展的介绍,能够为同业者带来一定的了解和启发。笔者相信,在折纸科学不断发展的过程中,折纸机器人将成为机器人发展的重要方向。