智能协作机器人制餐服务系统研制
2022-01-19孙奇涵祁宇明邓三鹏王文李丁丁
陈 伟 孙奇涵 祁宇明 邓三鹏 王文 李丁丁
(1天津职业技术师范大学机器人及智能装备研究院,天津,300222;2天津博诺智创机器人技术有限公司,天津,300352;3天津市智能机器人技术及应用企业重点实验室,天津,300352)
0 引言
随着国内适龄劳动力人口数量减少和人力成本的增加,以及小批量、定制化的柔性生产模式逐渐成为先进制造企业普遍采用的生产模式,人机协作应用正在呈上升趋势[1]。协作机器人以其安全、稳定、易操作、可实现“人机协作”的生产特性[2],被广泛应用于不同领域,如医疗[3]、服务行业[4]、汽车装配[5]、智能AGV[6]等。文献[7]提出了一种人机协作的手术方法,将协作机器人应用于临床手术,可使手术更精确、更高效。文献[1]利用协作机器人进行汽车天线罩涂胶,能有效解决人工涂胶胶形不准、胶水溢出等问题。文献[8]中将协作机器人与AGV结合组成复合机器人,该机器人能够在狭小的空间内实现精准定位,同时协作机器人机械臂可用于搬物品。
新冠疫情催生无接触需求,在抗疫过程中,无人超市、无人配送机、无人柜等无人技术的应用发挥了重要作用,无人、无接触、机器人餐厅[9]等消费方式逐渐受到大众欢迎。文献[10]中将协作机器人制成双臂汉堡机器人、双臂煲仔饭机器人、双臂煎炸机器人等,代替人工完成餐饮制备。文献[11]利用协作机器人制作冰激凌,机械臂控制前端仿形柔触手指包裹花筒,手臂利用阿基米德螺线全面还原人工动作,让冰激凌呈现标准曲线,实现协作机器人打制冰激凌。协作机器人正逐渐替代人工完成复杂工作。
针对当前传统早餐制作、售卖需要值守服务人员,人力成本高且容易产生污染等问题,本文设计了智能协作机器人制餐服务系统,将协作机器人应用到营养早餐配制过程中,以TIA Portal V16(博途)、点餐应用软件、MVP智能算法平台作为上位机对系统进行编程,采用SIMATIC S7-1200作为主控制器、协作机器人作为执行机构、机器视觉系统作为识别定位检测装置,通过工业网络将软硬件结合起来,实现软件在线下单,协作机器人全自动完成早餐制备。
1 系统总体设计
1.1 系统硬件设计
智能协作机器人制餐服务系统如图1所示。该系统主要由协作机器人、机器视觉系统、SIMATIC S7-1200PLC、五谷豆浆制备系统、包子制备系统、蒸蛋制备系统、牛奶咸菜制备系统和编程工作站等组成。
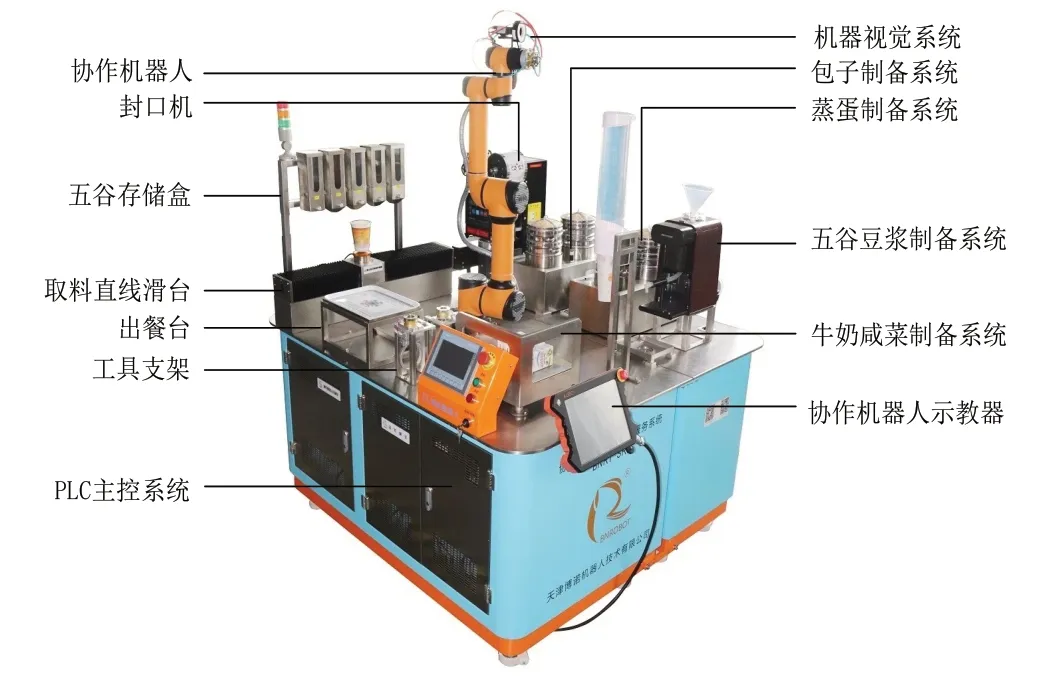
图1 智能协作机器人制餐服务系统
客户可通过点餐应用软件进行点餐,协作机器人收到订单后,按照订单进行营养早餐制备,包括五谷豆浆、鸡蛋、牛奶、包子、咸菜等早餐食物的制备。
在整个系统中,协作机器人位于系统中心,主要负责将早餐食物搬运至指定出餐台中、点触五谷豆料存储盒按钮配备五谷豆浆豆料、以及点触开启破壁机制作五谷豆浆;机器视觉系统的工业相机安装在协作机器人五轴轴壁上,可跟随协作机器人运动到指定位置点进行拍照,拍摄照片将由相机配套视觉软件MVP智能算法平台进行处理,识别位置信息将发送给协作机器人,从而完成对鸡蛋、牛奶、咸菜的识别与定位工作;PLC主要与点餐应用程序进行数据交互,并将订单数据发送给协作机器人进行制餐;PLC主控系统还控制取料直线滑台精确定位到五谷豆料存储盒正下方,控制包子、鸡蛋蒸锅自动补水、自动控温,控制状态灯颜色变化等。
1.2 制餐工艺流程设计
智能协作机器人制餐服务系统工艺流程如图2所示。系统上电完毕后,PLC程序会自动运行,检查鸡蛋、包子蒸锅液位是否正常;当液位低于阈值时,补水水泵会自动开启补水,直到液位正常;液位正常时,蒸锅会自启动加热。

图2 智能协作机器人制餐服务系统工艺流程图
当点餐应用软件接到下单后,软件按照Case 1豆浆、Case 2包子、Case 3鸡蛋、Case 4牛奶、Case 5咸菜的顺序进行订单队列排序。队列订单会逐一通过PLC发送给协作机器人,协作机器人则按照相应程序完成早餐配置。当协作机器人完成一个订单后,系统记录相应订单数据位置位,表明协作机器人已经完成当前订单。当前订单完成后,协作机器人程序循环运行,进行下一订单。
1.3 系统通信设计
智能协作机器人制餐服务系统控制网络拓扑图如图3所示。通过工业网络进行相互通信,协作机器人与PLC通信采用Modbus TCP/IP[12]通信协议;利用PLC的数字量I/O控制补水水泵、液位传感器、电动排水阀的状态,利用PLC的模拟量I/O采集和处理温度传感器、称重传感器的模拟量变化值;取料直线滑台则采用PLC的PTO脉冲串进行控制;协作机器人外部I/O则主要控制相机光源的亮灭,同时控制电磁气阀的通断实现夹爪开合、吸盘的吸附与释放等。

图3 智能协作机器人制餐服务系统控制网络
2 系统数据处理
点餐应用软件与PLC、PLC与协作机器人数据处理框图如图4所示。系统接到点餐应用软件下单后,下单数据会通过HTTP协议传至接口服务器,同时下单数据也会被保存在MySQL数据库中;根据下单数据,SIMATIC S7-1200PLC中的数据块相应的数据位也会改变,进而改变协作机器人内部I/O,从而实现点餐应用软件控制协作机器人完成早餐配置。
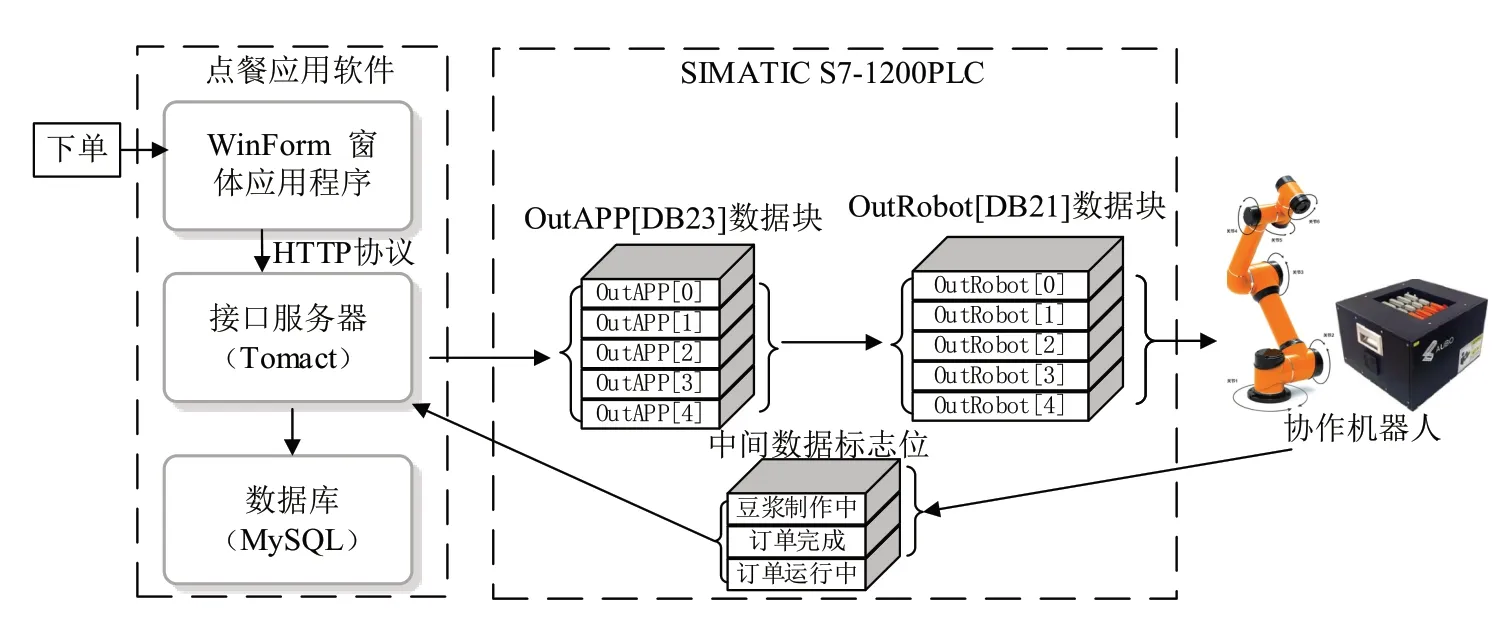
图4 点餐应用软件与PLC、PLC与协作机器人数据处理框图
2.1 点餐应用软件与PLC的数据交互
点餐应用软件基于C/S架构,用C#语言编写WinForm窗体应用软件,使用接口(API)服务器进行数据处理,数据存储在MySQL数据库中,接口服务器使用Tomcat服务器。
点餐应用软件与PLC建立Socket通道、以Modbus TCP/IP协议进行通信,PLC采用“MB_SERVER”通信指令,连接ID为1,通信端口号为502,点餐应用软件作为客户端,PLC作 为Modbus TCP服务器。系统在接收处理点餐应用软件的下单数据时,以5类早餐食物为例,点餐应用软件输出到PLC的数据被保存在Out APP [DB23]数据块中,如表1所示。

表1 点餐应用软件与PLC通信表
客户通过PC端点餐应用软件下单后,软件将下单数据以HTTP协议推送到接口服务器(Tomcat),接口服务器查询数据库中的订单,如果显示“订单运行中”,则直接添加数据到数据库中,若显示“订单完成”则通过Socket通信,以Modbus TCP/IP协议通过报文请求发送数据给PLC,再改变PLC中Out APP[DB23]数据块的对应地址数值(每个地址对应一种早餐类型),从而实现点餐应用软件与PLC通信。
2.2 PLC与协作机器人的数据交互
PLC与协作机器人以Modbus TCP/IP协议进行通信,PLC作为服务器,协作机器人作为客户端。PLC采用“MB_SERVER”通信指令,连接ID为2,通信端口号为504。PLC输出到协作机器人端的数据保存在Out Robot[DB21]数据块中,同时,PLC采用“MOVE”指令将Out APP[DB23]数据块中指定的通信信号传递给Out Robot[DB21]数据块,Out APP[0]中的变量传递给Out Robot[0],Out APP[1]中 的 变量传递给Out Robot[1],以此类推。
在协作机器人端,则以Out Robot[DB21]数据块中PLC变量、按照通信地址顺序设置协作机器人内部I/O,如表2所示。当Out Robot[DB21]数据块中的通信信号发生改变时,协作机器人内部I/O也会随之变化,从而实现PLC与协作机器人通信。

表2 PLC与协作机器人通信表
当协作机器人收到下单数据时,机器人则按照设定程序进行早餐订单制备。在PLC中设置有中间数据标志位DB数据块,如表3所示,采用“ADD”指令监控Out APP[0]至Out APP[4]数据位,当“ADD”指令运算结果为0时,则表示订单完成,当“ADD”指令运算结果不为0,则表示订单执行中。由于豆浆制备需要等待,当五谷豆料放入破壁机后,采用通电延时定时器(TON)指令延时300s,在此等待期间,协作机器人可进行其他订单的制备,延时结束后,协作机器人取豆浆,同时将“豆浆制作中”标志位置位。

表3 PLC与协作机器人通信表
3 程序设计
3.1 机器视觉系统程序设计
本机器视觉系统采用的是华睿科技基于PC的智能工业相机以及MVP智能算法平台。工业相机采用12M/CG-E千兆以太网智能工业相机,通过网线以点对点连接的组网方式与PC连接,线缆连接后,PC安装的MVP智能算法平台可以检测到在线的相机,确保相机IP与本地PC的IP处于同一网段,相机便可正常运行操作。
根据识别到的不同早餐类型,系统采用分支结构编写相应逻辑流程,如图4所示。工业相机根据接收报文标志字符串进入相应分支,相机拍摄照片传回PC端进行图像处理,处理结果为识别目标中心点像素坐标,通过坐标转换器将像素坐标转化为工件坐标,利用分析脚本算子将工件坐标转化为字符串,最后以报文形式将目标中心点坐标发送给协作机器人,协作机器人则根据坐标进行吸取鸡蛋、牛奶、咸菜等操作。

图4 机器视觉系统识别逻辑流程
3.2 协作机器人制餐程序设计
协作机器人程序采用模块化编程思路,程序框架如图5所示。通过Move(直线、轴动、轨迹)、Waypoint(位置点)、Switch(开关语句)、Case(条件)、Set(置位/复位)、Wait(等待)等指令,设计人员将制备早餐全部动作分别编写成子程序,然后通过逻辑条件将各子程序组合起来,实现全自动制备早餐。
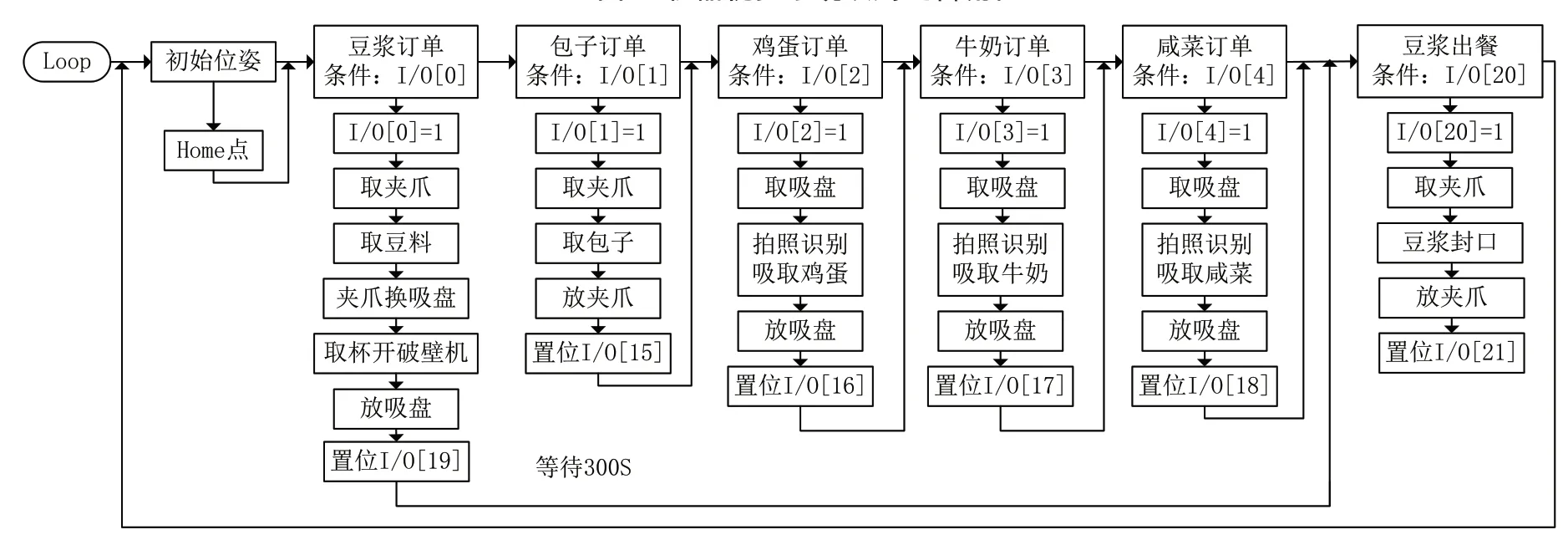
图5 协作机器人制餐程序框架图
当系统正常运行时,协作机器人在Home点等待下单,当I/O[0]、I/O[1]、I/O[2]、I/O[3]、I/O[4]中任意一个条件符合,即符合订单制备条件时,协作机器人则按照预先编写的轨迹逐一完成早餐制备。
4 系统测试
智能协作机器人制餐服务系统硬件部分搭建完成后,设计人员对早餐制备程序进行编程;完成程序编写后,测试运行程序。
系统等待点餐应用软件下单,设计人员分别对豆浆、包子、鸡蛋、牛奶、咸菜进行单独下单以及组合下单。由于豆浆、包子选用夹爪进行抓取,而鸡蛋、牛奶、咸菜选用吸盘进行吸取,故组合下单时需要10s时间更换工具。
系统测试实验数据如表4所示。
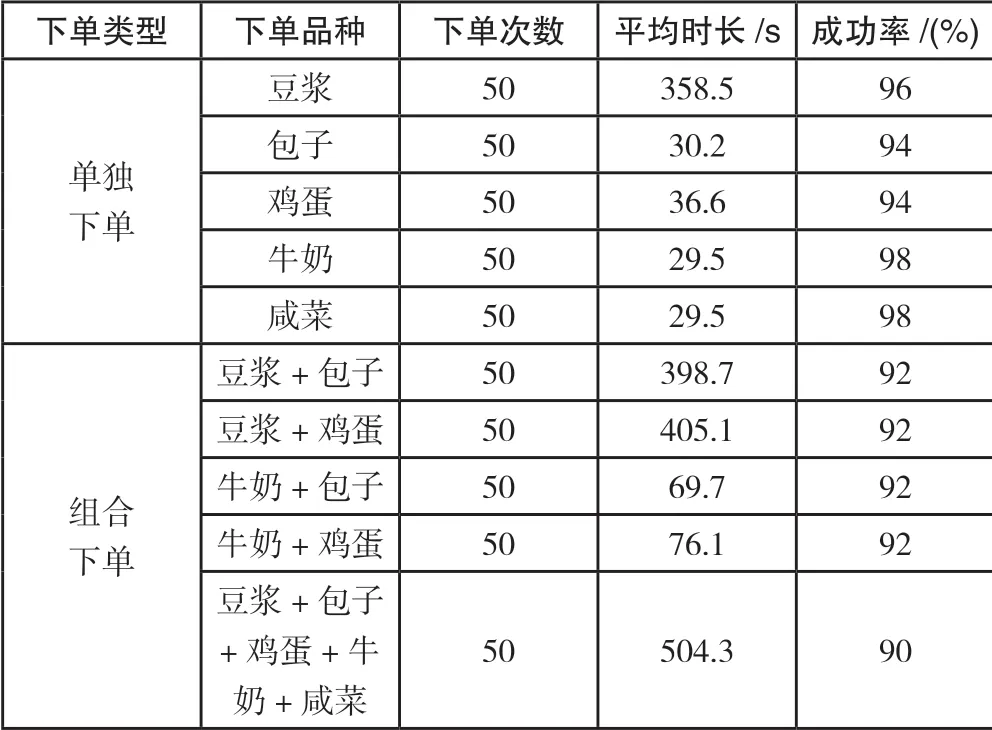
表4 智能协作机器人制餐服务系统测试数据
5 结语
针对传统早餐制作存在的问题,本文提出一种将工业互联网软件、工业自动化控制、机器视觉、协作机器人等技术结合工业网络的解决思路,将SIMATIC S7-1200 PLC作为主控制系统,机器视觉系统作为识别定位检测装置,协作机器人作为执行机构,联合天津博诺智创机器人技术有限公司研制了智能协作机器人制餐服务系统,进行了30余台设备的批量测试,并进行了推广应用。实践表明,该系统具有较好的操作性和稳定性,能够实现在线点餐,且协作机器人能够稳定可靠地全自动完成早餐制备工作。