垃圾智能分类工作平台的设计
2022-01-19齐新霞黄栩鸿张睿鹏王潇宜黄宝莹林诗洁
齐新霞,黄栩鸿,张睿鹏,王潇宜,黄宝莹,钟 玥,林诗洁
(北京理工大学珠海学院,广东 珠海519088)
现有市场的智能垃圾桶还是需要人工将垃圾分类,再倒入相应垃圾桶,大量消耗人力、物力、财力,不能真正意义上实现垃圾的智能分类,并且大都为方形垃圾桶,相对本设计占地面积较大,不可能在居民家庭中得到应用[1-2]。针对目前居民对于垃圾分类意识淡薄,不知道如何正确区分垃圾种类的问题以及居民家庭用类垃圾桶现状,本文进行了垃圾智能分类工作平台的设计,本设计的工作平台包括桶盖、桶身和底座三个部分,能实现完全无接触地对垃圾进行精准分类。本设计的爆炸图如图1所示。

图1 垃圾智能分类工作平台爆炸图
1 桶盖的设计
本设计的桶盖包括图1~图4所示的2个四杆机构、2个扇环形门、2个小舵机(如图3所示的电机1和电机2)、2个滑块、2根小轴、1个V形槽及连接卡槽。其中图4所示桶盖底部的中心所设的一个连接卡槽是桶盖与桶身的连接关键[3]。
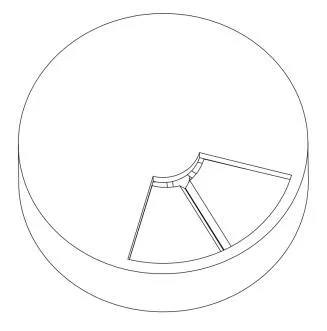
图2 工作平台上表面
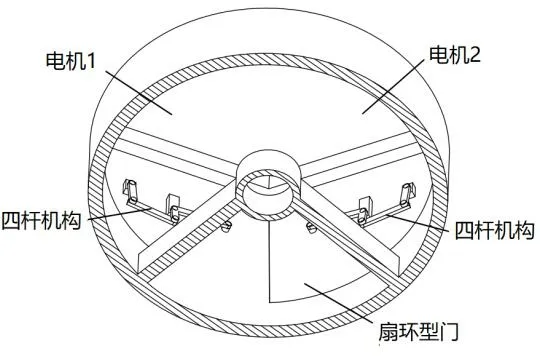
图3 工作平台桶盖内部结构
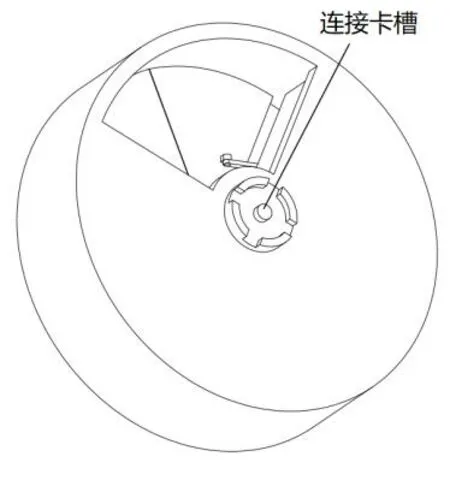
图4 桶盖总体图(底面)
1.1 扇环形门的设计
本设计的2个扇环形门由铝合金材料制作成,扇环门安装在两根伸出的小轴上,并位于四杆机构上部,两个扇环门关闭时的平面低于工作平台上表面,所低的高度为扇环门的厚度,扇环门通过伸出小轴与滑块配合,滑块又与V形槽配合实现固定或控制扇环门的开关角度,其开放最大角度为90°。两个扇环门连接处设计为斜面交错啮合结构,目的是防止两个扇环门向下侧翻运动时产生交错或磨损,扇环门底面上分别焊接一个套环,该套环通过销钉与四杆机构连接,通过电机带动四杆机构运动,又分别推动扇环门与两根小轴一起旋转,实现扇环门的开闭[4]。如图5所示。

图5 扇环形门
1.2 小轴、滑块的设计
本设计的伸出扇环门的小轴由铝合金材料制成,每个扇环门上各有1根小轴,小轴一端与扇环门焊接连接,另一端通过滑块连接到桶盖下面的V形槽内。
本设计的滑块共有2个,滑块是由铝合金材料制成的空心圆柱块,滑块与扇环门上的小轴为过盈配合,并随扇环门和小轴一起,以同样的速度和角度转动。滑块嵌在V形槽内,并以V形槽内为运动轨道,在四杆机构带动下随扇环门和小轴一起运动,实现固定与控制扇环门的开关角度。
1.3 四杆机构的设计
本设计的2个四杆机构分别安装在桶盖的下部,它的一端安装在扇环门底面上,另一端通过联轴器与电机连接。图1所示四杆机构的连架杆1通过小小轴与扇环门底面套环连接,小小轴与套环及连架杆1均为过盈配合。连架杆2通过联轴器与电机连接。考虑到扇环门寿命及其开闭稳定性,将连架杆1设计为三角形结构。市面上购买的2个电机型号一致的电机1和电机2分别安装在图3所示位置,通过图3所示传动路线控制四杆机构运动,实现2个扇环门的开闭。本设计的四杆机构的组成零件均为不锈钢件。
1.4 V形槽和链接卡槽的设计
本设计的V形槽和链接卡槽均由不锈钢材料制成,V形槽与桶盖底面焊接连接,其作用是使滑块嵌入其中,滑块随着扇环门一起在四杆机构推动下运动,滑块在V形槽内按照预期运动轨迹运动,实现扇环门开闭,其装配如图6所示。图4所示的连接卡槽与桶盖底面焊接连接,连接卡槽通过连接件与大轴上端连接,该装置的作用是连接大轴和桶盖。
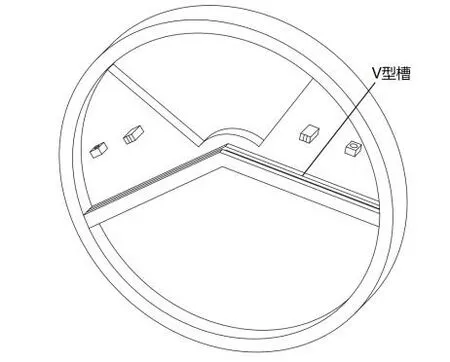
图6 V形槽装配图
2 桶身的设计
本设计的桶身由连接件、大轴和4个扇环形桶身(对4种垃圾分类)组成,如图7所示。
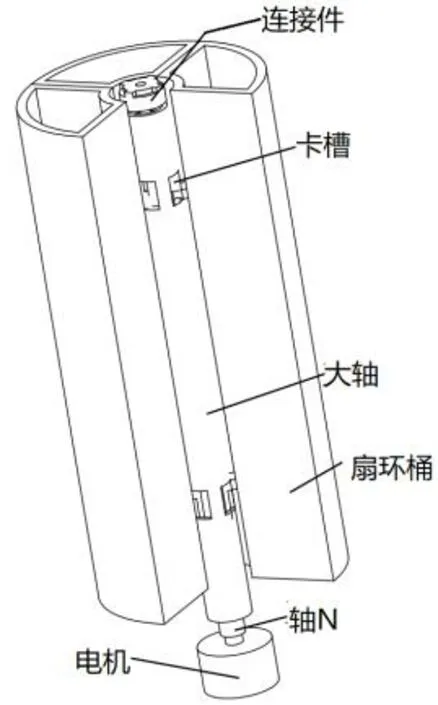
图7 3/4桶身装配图
2.1 连接件的结构设计
图8 所示的连接件由不锈钢材料制成,用于桶盖与大轴之间的连接,连接件上方的卡槽与桶盖下方的连接卡槽相互锁紧,使桶盖和连接件连成一体,实现对4个扇形桶身的加盖作用。连接件下面通过轴承与大轴上端相连,轴承直接装入连接件下面伸出的轴M的外面,轴承与连接件为过盈配合,工作过程中该轴承外圈旋转,内圈不转。此设计便于对桶盖拆卸及清理卫生。最终使桶盖与大轴连成一个整体,大轴带动4个扇环形垃圾桶身运转,连接件和桶盖均不运动[5]。
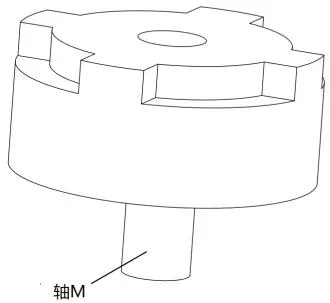
图8 连接件
2.2 大轴的设计
本设计的大轴由不锈钢材料制成,大轴上1/4和下1/4外的高度处,分别均匀分布有4个(或多个)卡槽,如图7所示。该卡槽用于与扇环桶的连接配合,以保证将扇环桶锁紧在大轴上,让大轴带动扇环桶一起旋转。大轴上端通过轴承与连接件连接,该大轴套在轴承外圈上,二者为过盈配合,大轴下端装有一个轴N,大轴和轴N为过盈配合,联轴器将轴N和电机轴连接起来,实现电机带动大轴旋转[6]。
2.3 扇环桶的设计
本设计的扇环桶由不锈钢材料制成,扇环形桶的横截面为扇环结构,本设计共有4个扇环桶,如图7、图9所示。扇环桶的上1/4和下1/4外的高度处分别焊接有图1所示的2个卡扣,卡扣对称焊接在其小扇形面上;安装扇环桶时将卡扣卡入大轴卡槽,即可实现大轴与扇环桶连接及旋转。
垃圾被投放在扇环形门上面后,被自动识别,控制系统依据识别结果指令给运转系统,运转系统将对应的扇环垃圾桶旋转至扇环形门下方,桶盖上的2个扇环形门打开,垃圾自由落入对应的扇环形垃圾桶内,完成垃圾自动分类装桶。垃圾自动识别是依据大数据,采用成熟技术。桶身如图9所示。
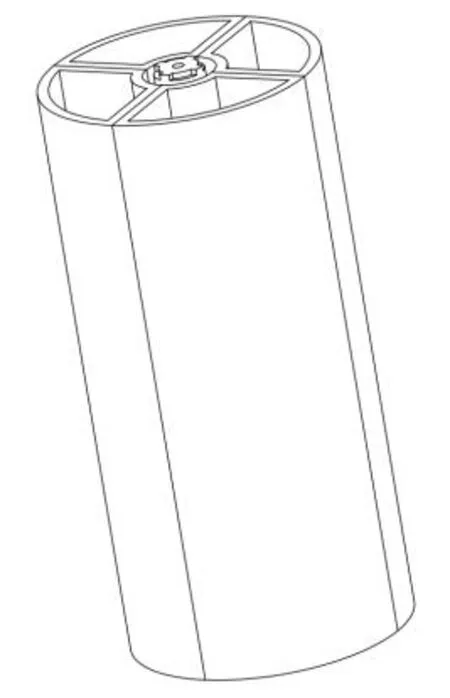
图9 桶身整体
3 底座的设计的设计
本设计的底座由基座和电机组成。基座用于支撑整个智能分类垃圾工作平台及垃圾的质量。
基座由45钢材料制成,基座上层面的大孔与大轴有2~5 mm的间隙,即大轴穿过大孔与如图10所示的电机连接。大轴的下表面与基座中间层的上表面间有2~5 mm的间隙。大轴下端的轴N与电机的轴通过联轴器连接,联轴器和轴N及电机的一部分轴均穿过基座的小孔,联轴器与小孔之间有2~5 mm的间隙,这样的设计可以确保大轴及其运转的稳定[7]。
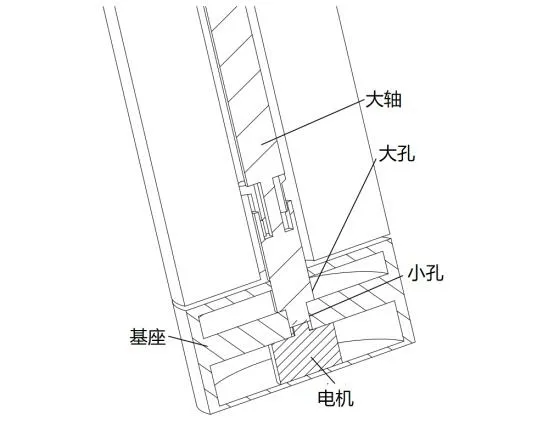
图10 底座及大轴装配图
本设计的底座电机根据平台及垃圾的质量选择型号ZGA37RG的普通电机。本设计的垃圾智能分类工作平台工作时,人将垃圾放在扇环形门上面,大数据识别垃圾后,普通电机带动大轴旋转,大轴又带动桶身旋转,即承装相应垃圾的扇环桶,转到扇环形门下面,此时图3的电机1和电机2旋转并由四杆机构带动扇环形门旋转,垃圾随扇环形门开启落入对应垃圾桶内,实现间歇接受垃圾,达到智能分类的目标。
4 结论
本设计解决了人们目前无法正确对垃圾进行智能分类的难题,可以实现垃圾智能分类收集。生活垃圾妥善分类处理,能大大减少从业人员数量及工作时间,减轻城市垃圾处理的压力,并让各种垃圾获得妥善处置,对垃圾综合利用及资源化无害化处理均有益。
本设计的“垃圾分类智能工作平台”不仅结构设计创新,还实现对源头垃圾进行分类,开启了利用智能+与垃圾分类相结合的垃圾分类新模式,而且在垃圾分类“减量化、无害化、资源化”方面是一个身体力行的操作过程的创新。
本设计是构建有效垃圾分类体系,实现垃圾源头分类的目标,共享智慧社会、智慧生活的红利的基础。