基于BP 神经网络优化扫频线性度的FMCW 激光雷达
2022-01-18金里杨米杰曹睿蒋平李同辉吴蓓蓓路侑锡
金里 杨米杰* 曹睿 蒋平 李同辉 吴蓓蓓 路侑锡
(联合微电子中心有限责任公司,重庆 400000)
1 概述
激光雷达(LiDAR)技术被广泛应用于机器人、自动驾驶和地图绘制等领域。其使用的测距技术主要分为两类:脉冲飞行时间技术(Time of flight, TOF)和调频连续波技术(FMCW)。目前TOF方案较为成熟,已经用在多个领域,其通常与机械式(转镜、电机、MEMS 等)光束偏转方案结合,实现3D 探测,FMCW 方案近几年来,被世界范围广大的关注,成为研究热点。与传统的TOF相比,FMCW 技术具有光功率要求低、分辨率高、抗阳光照射等优点,且易于与硅基光学相控阵技术相结合,有望芯片化实现收发探测。此外,FMCW 利用多普勒效应同时提供目标的位置和速度信息,使其更有利于目标分类[1],区分出动、静态目标,降低后端算法的处理复杂度。FMCW 激光雷达采用相干探测原理来测量目标的距离,激光源发出扫频信号光,到达目标后反射到接收器,接收到的反射光和参考光被光电探测器同时检测并转换为拍频信号,通过计算接收拍频信号的固定频率,可以提取目标距离。因此FMCW 激光雷达需要激光频率扫描的非常高的线性度,以便提取稳定的拍频信号,提高探测精度。然而,对于大多数激光器,调谐电信号和输出光频率之间的关系不是线性的。激光扫频的残余非线性会降低测量的稳定性、分辨率和信噪比。近年来,国内也有一些团队开始了激光线性度校准的研究。2015 年,赵青云等人实现了激光器的开环预标定。当激光频率偏移为45 GHz,扫描频率为1 kHz 时,残余非线性范围为0.345% ~0.578%,实现3 米的距离测量。2019 年,张晓生等采用开环迭代学习方法实现DFB 激光器频率扫描的高线性度。激光线性剩余非线性为0.005%,激光频率偏移为49 GHz,扫描频率为4 kHz,实现了3 米以内的二维成像。
本文采用比例积分微分(PID)控制方法结合后向传播(BP)神经网络来提高激光频率扫描的线性度。通过分析下一次迭代的反馈差和输出,可以实现激光线性度的高效标定,采用DFB 激光器作为激光源。实验表明,该控制方法具有较高的线性度和快速的频率扫描标定速度。DFB 激光器的扫描频率为12.5 kHz,频率偏移为3.7 GHz,峰值驱动电压为140 mV。残余非线性系数为0.0015%。
2 算法和分析
PID 控制方法是一种简单有效的算法,在控制系统中有着广泛的应用,但也存在非线性和不确定性的缺点。BP 神经网络具有自主学习能力,能对PID 参数进行优化,达到更好的控制效果。控制系统由两部分组成:PID 控制器作为直接闭环控制器,BP 神经网络作为PID 控制器的调节。PID 控制方法采用增量式PID 控制算法进行计算。控制算法可以用公式来表达:
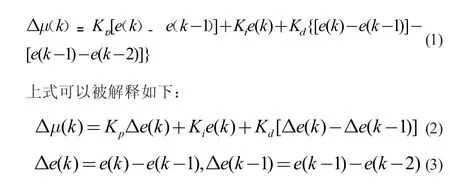
上式中Kp,Ki,Kd分别为PID 控制系统的比例系数、积分时间常数、微分时间常数。

隐含层的输入输出如下:
如式(11),神经网络输出三个节点分别对应PID 的Kp,Ki,Kd。
3 实验结果
激光扫频线性化预标定测试系统的架构如图1(a)所示,系统包括激光器、激光驱动器、光纤组成的马赫曾德干涉仪(MZI)、平衡检测器(BPD)和个人计算机(上位机,PC)[3]。激光器发射一束信号到MZI 中,而MZI 其中一条臂含有一段延迟光纤,延迟时间为。MZI 的两输出信号光由BPD 检测并转换为拍频信号。上位机采集接收到的数据,计算拍频信号的固定频率,并对算法进行校正,其中不同的延迟光纤长度分别对应不同的拍频信号频率。
算法迭代过程示意图如图1(b)所示。PC 通过希尔伯特变换计算频率变化值Vk(t)。通过分析Vk(t)与期望值Vd(t)的差值,可以计算出误差ek(t)。通过采用基于BP 神经网络的PID 控制算法,计算出下一个驱动电压t),加载驱动数据,完成[4]迭代。为验证算法模型,将该算法应用于波长为1550 nm 的DFB 激光器。采集设备采用吉时利示波器MSO9104A,采样率为200mhz/s。PC 作为数据处理和三维点云生成的平台。上位机通过VISA总线与示波器通信,对采集到的数据进行控制和传输。制了驱动电压范围为0 ~500mv 的激光驱动器。DFB 驱动通过串口与PC 机连接,实现通信配置和其他交互。峰值驱动电压为140 mV。通过优化算法,实现了扫描频率为12.5 kHz,激光频率偏移为3.7 GHz。残余非线性达到0.0015%。该控制方法具有较高的线性度和快速的标定速度。标定前后的驱动曲线如图2 所示,分别为(a)和(b)。图3 给出了半周期内扫频带宽与时间的关系,有效地表征了DFB 激光器的高线性度。红色曲线和蓝色曲线分别为理论实验曲线。
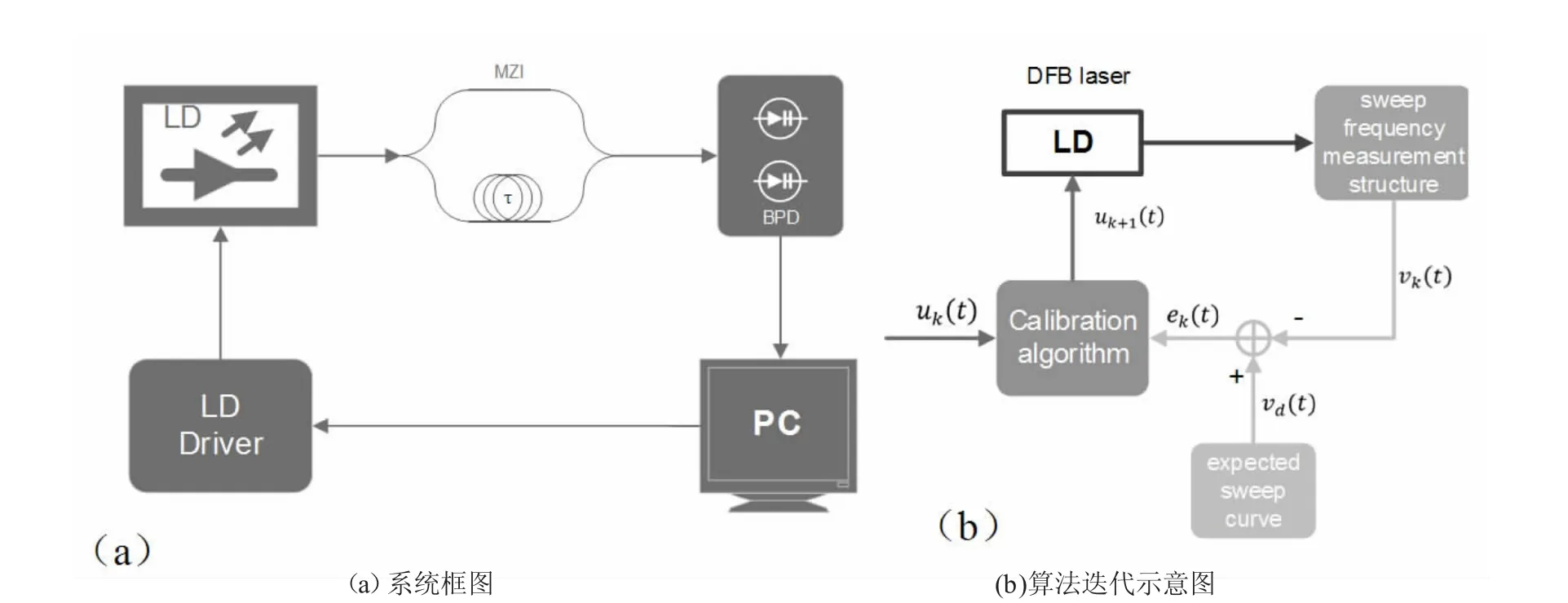
图1
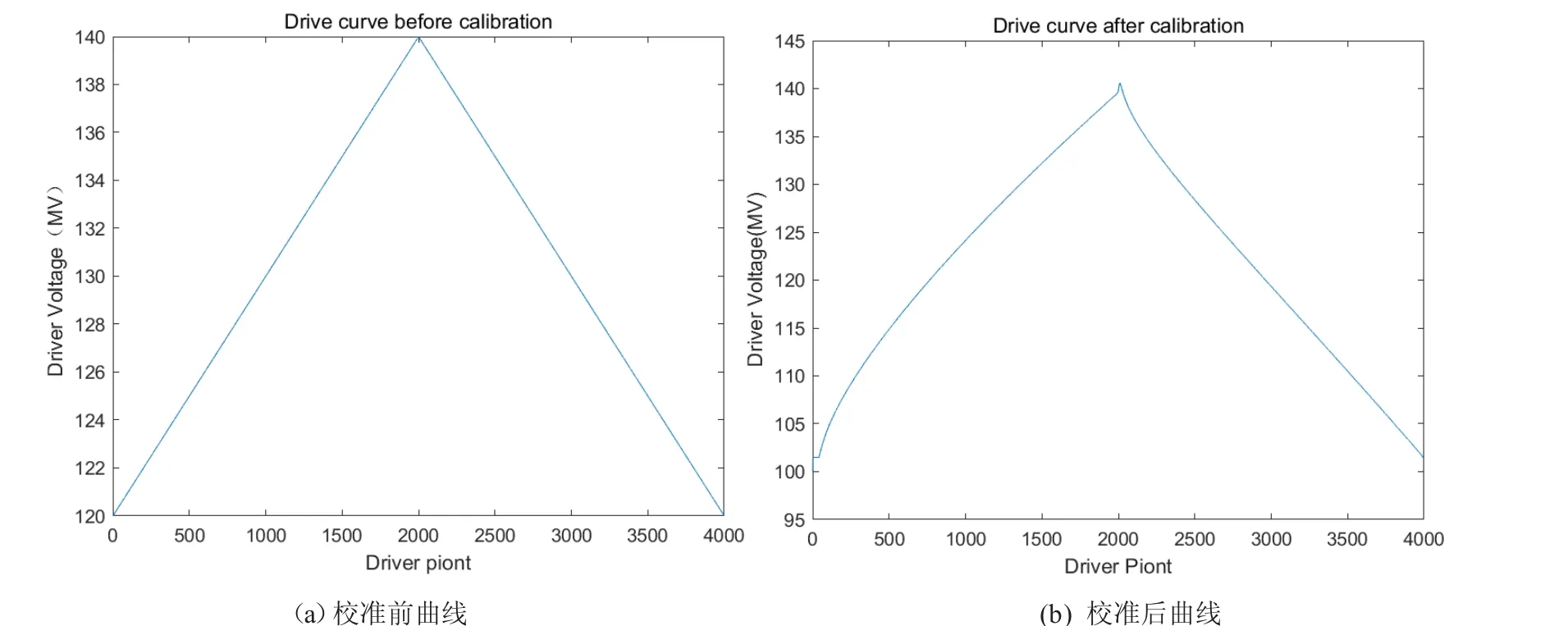
图2 激光器的驱动信号曲线
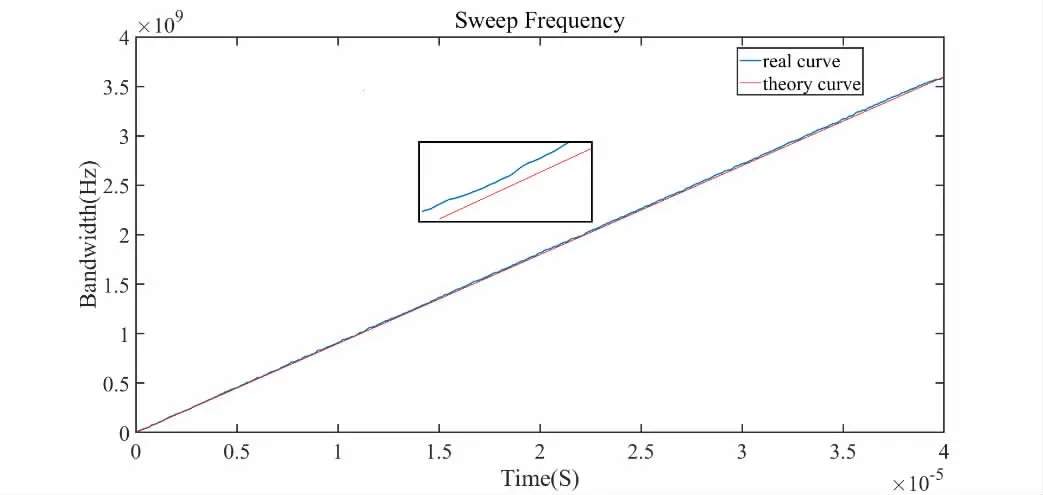
图3 激光器线性扫频校准后的结果
还进行了基于FMCW 激光雷达的二维成像实验。扫描装置采用二维机械电流计,x 轴和y 轴扫描角度为±20°,扫描精度为0.1°,实测结果如图4 所示。图4(a)为实景,包含沙发、后墙、柱子。图4(b)为系统测量的三维图像,精确恢复了目标的三维特征。
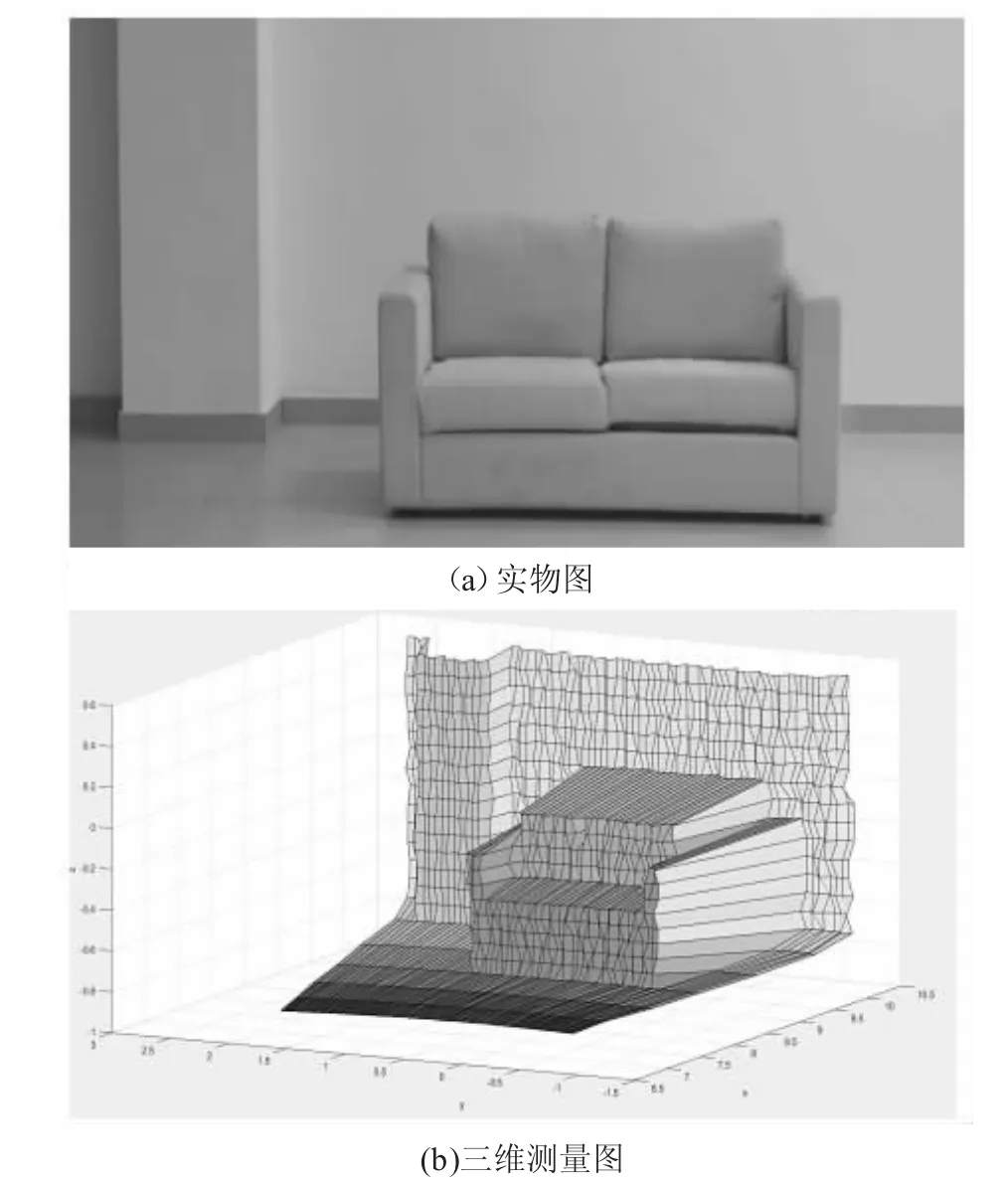
图4 沙发三维测量点云图
此外,还对车库进行了建模,以验证远程检测的性能。x 轴扫描角度精度为0.15°,y 轴扫描角度精度为0.2°。实测结果如图5 所示。图5(a)是车库的真实图片,到后墙的距离为70 米,柱子之间相隔约7 米。图5(b)是系统测量的图像,FMCW 激光雷达收集壁面和每个柱面的信息,收集点显示了一个理想的修复。
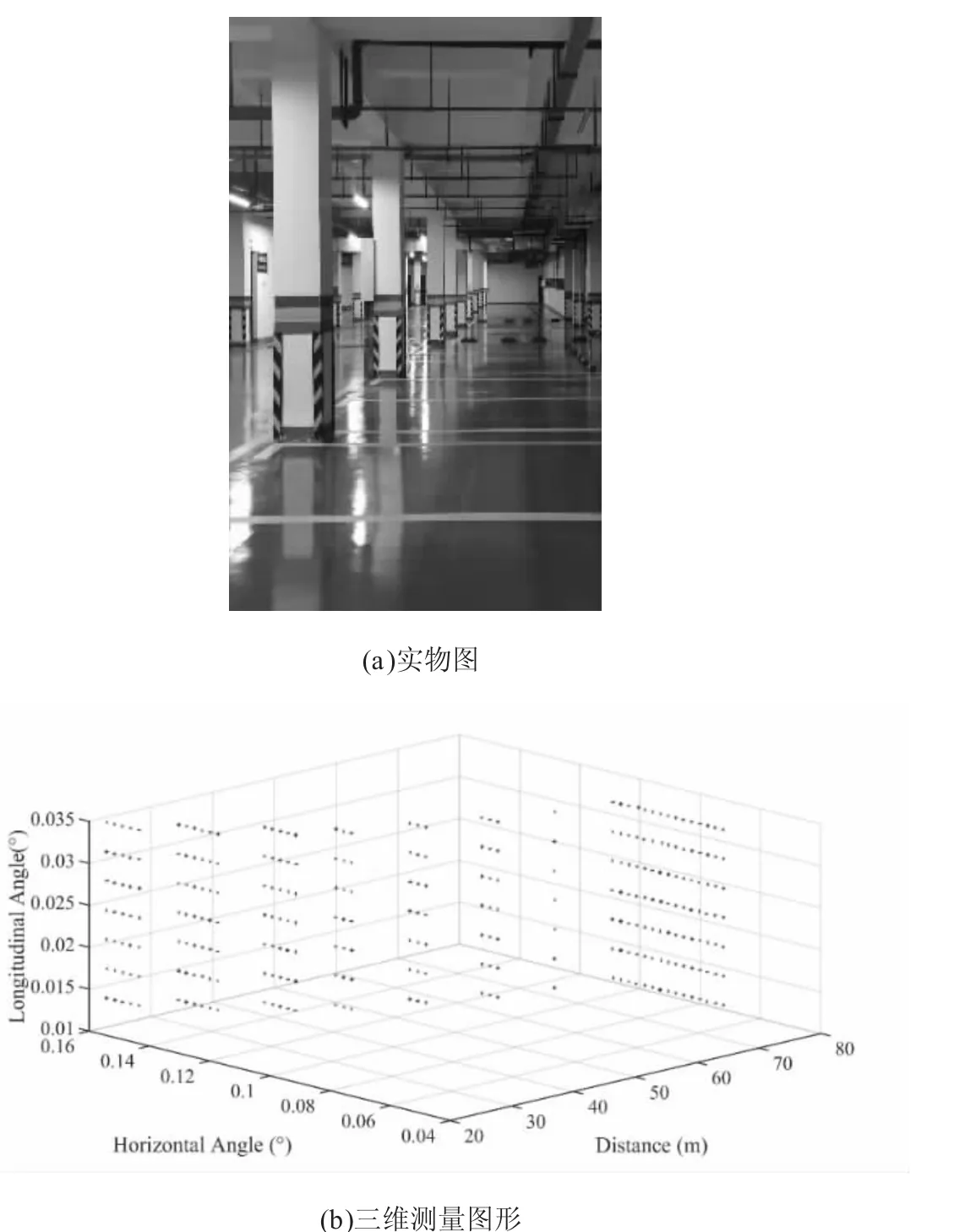
图5 地下车库柱子三维扫描图
4 结论
采用PID 控制方法结合BP 神经网络实现了DFB 激光器的理想预标定。实验实现了线性度较好的激光扫频,满足了FMCW 激光雷达的要求。实验证明了二维成像。该方法不需要额外的电路,消除了电路的复杂性和数字算法的难度,从而降低了FMCW 激光雷达的成本和系统复杂度。此外,采用BP 神经网络算法优化的PID 控制方法提高了收敛速度。迭代基本上是在几十次之后完成的。结果表明,优化后的算法加快了迭代速度,提高了系统的实用性。
感谢:
本工作得到了联合微电子中心有限公司的大力支持。免责声明:作者声明不存在利益冲突。
