变电站联合巡视系统设计及实现
2022-01-18王欣邵海飞李浩涛谢斌杨克虎
王欣,邵海飞,李浩涛,谢斌,杨克虎
(云南电网有限责任公司,云南 昆明 650217)
0 前言
随着技术的发展,针对变电站巡检的手段及智能终端越来越多,目前主要包括视频巡视、机器人巡视、智能巡检终端,及未来涌现出更多的巡视手段。现阶段“各自为政”的巡视方式不能满足巡视覆盖率及巡视有效性的分析,存在多种巡视方式从开始到执行过程及结果无法统一,会产生巡视盲区。本文重点通过对联合巡视的变电智能巡视平台设计方法,利用巡视任务动态编排、巡视结果一体化处理等技术,结合视频巡视、机器人巡视、无人机方式,开展巡视数字化体系设计、巡视数字化模型构建、巡视结果多源异构分析等技术研究及巡视平台的架构、功能设计。
1 联合巡视系统总体设计
基于变电运行管理办法,构建变电联合巡视运行体系,采用联合巡视手段,解决当前当前巡视所面临的问题。主要以巡视管理要素为指南,确保巡视的数字化。具体通过确定巡视标准化模型,并与在运的每台设备开展关联匹配,结合实际的巡视路线及点位要求,配置智能传感器、摄像头、机器人、无人机等终端作为巡视方式开展巡视,巡视结果输出到统一的服务平台,开展应用分析及巡视新模式探索,逐步实现变电站内巡视工作无人化替代。为保证联合巡视实现预期目标,在建设过程中必须严格把握“基于问题、实用化”的思路,从运行人员需求出发,合理合理选择无人机、视频监控巡视预置点位,充分发挥各种巡视途径的优势。
为满足智能巡视要求,通过构建三层数字化模型以及一条数据通道的联合巡视管理,依据运行管理办法、巡视管理要素、变电站设备要素三个层级为一体的管理要求及标准规范,构建对应的管理模型、标准化台账、巡视标准模型、设备对象数字化等模型,实现管理要求与设备对象、属性、行为及服务的有效关联,应用信息汇聚、联动匹配、多种组合及设备能力匹配等技术,实现管理的层层解耦。当巡视完成以后,通过构建一条数据通道实现的巡视结果存储及分析,采用高度集合的方式实现巡视结果的跨域融合及标准化封装,保证巡视结果通过自下而上的汇聚,通过信息汇聚、分发、分析处理后,通过信息解耦,构建的内循环自学习机制实现巡检路径、联合巡检及巡视方式优化,反向指导巡视的解耦过程,在应用过程中不断积累运行数据实时修正分析及识别模型,逐步满足生产运行管理办法所设置的管理目标。
2 联合巡视功能设计
2.1 联合巡视布点
依据巡视管理及巡视要素等要求,借助变电站三维模型,针对开关场、高压室、主控室等区域开展巡视点位设计。布点过程中融合无人机、摄像头、机器人在“空天地”坐标位置的特点及各自的优势。针对视频点位确定,通过考虑枪机、球机、云台的分辨率、镜头焦距、云台角度等参数,基于点云LAS文件构建变电站三维模型,采用拖动的方式,实现点位仿真设计,最终找到最佳点位。在无人机航点布置过程中,重点考虑了视频巡视的的盲点,在三维模型上通过航点规划,实现每条航线的飞行路径及预计停留时间,预估能够覆盖的主变外观、表计、散热,站用变,断路器、隔离开关开合、绝缘子外观等,确定无人机的站内、站外初步航点。针对无线测温需求、机器人地面行走优势,重点关注高压室、主控室等区域,初步找出无人机、视频无法覆盖的点位,开展机器人的初步行走路径设计。
2.2 巡视要素管理
开发变电巡视要素管理模块,依据巡视管理要求,实现变电站内各专业设备的巡视要素的管理。开发巡视对象管理模块,实现每个设备的巡视要求,巡视点位,巡视设备,巡视预置点位的管理。与视频、机器人、无人机通过API接口对接的,可通过平台开展巡视点位配置、云台控制、航线规划等。在巡视管理过程中,根据每个变电站的实际情况,同时可以借助三维模型开展巡视点位的确定,巡视预置点位的设置,巡视航点的规划等,确保巡视点位与预置点位的匹配。当巡视效果不佳时,运行人员通过进入该功能模块,在不用到现场的情况下即可对设备的预置点位进调整,以保证巡视覆盖率及巡视效果。
2.3 联合巡视任务动态编排
通过获取巡视计划平台的日常巡视、夜间巡视、详细巡视、专业巡视、动态巡视等巡视等计划,通过文本比对方式实现巡视任务及计划的快速关联。要想实现用户自定义的任务编排,因此开发了巡视任务编排模型,可实现用户参与设计巡视的关键要素,实现工作对象与工作地点、巡视设备、巡视方式的有机关联及有效巡视。基于标准化封装、设备能力匹配、动态编排、跨域融合等方式,形成统一的巡视业务支撑底座,支撑快速构建上层巡视方式应用,有效支撑场景更复杂、需求更多样的新的巡视业务需求。

图2 巡视任务编排模型图
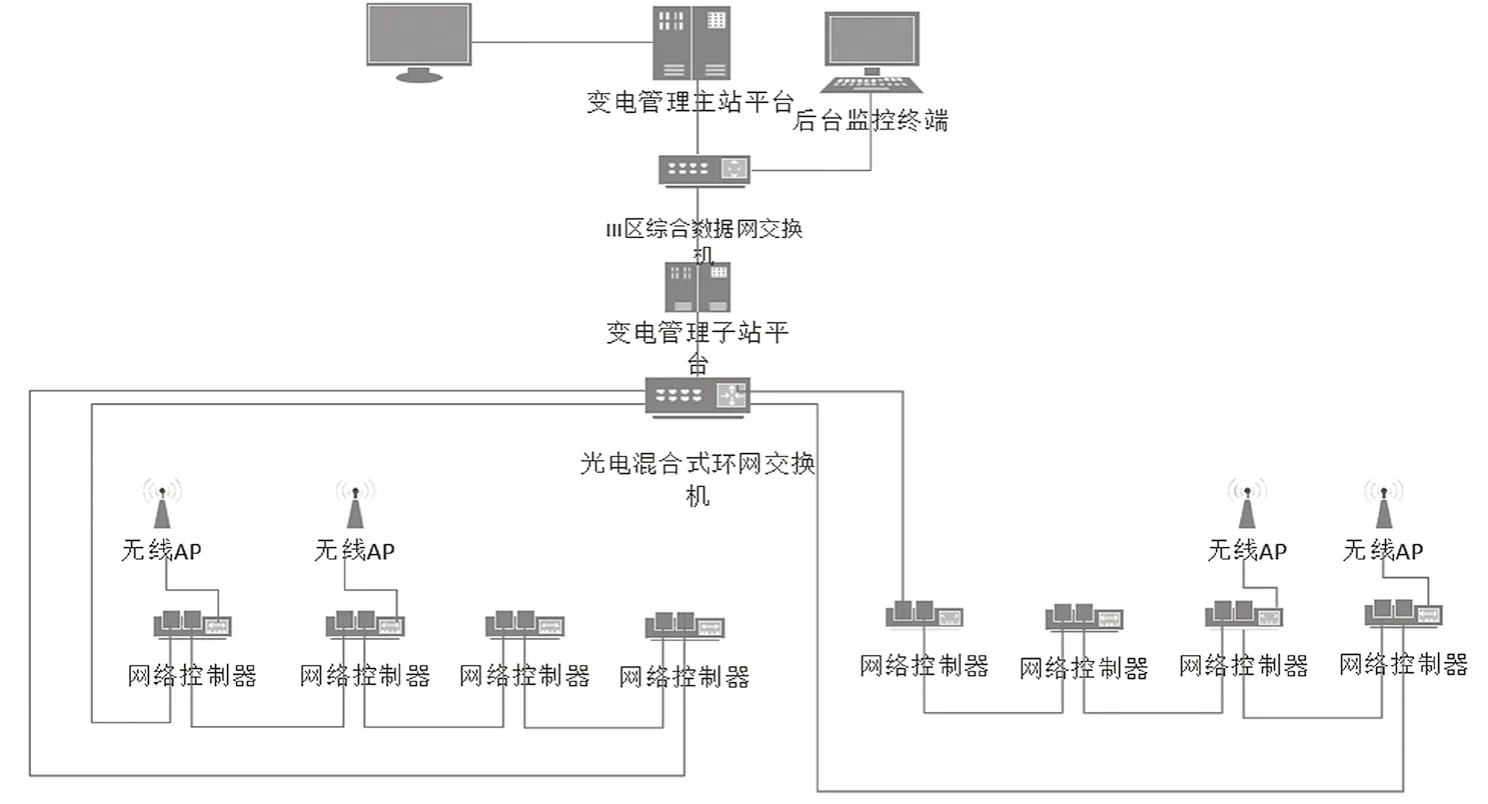
图3 联合巡视通讯组网图
2.4 联合巡视网络通道构建
通过构建联合巡视的网络通道,保证无人机、机器人巡视执行及巡视结果上传的无线通道,保证视频上传巡视视频信息的有线通道。包括后台通讯屏柜,并设计网络控制箱,每个控制箱都具备无线AP、光纤、网线通讯功能,分为2组环网方式,网络控制箱采用长条设计垂直安装。机器人及无人机通过无线WIFI通信,天线用射频信号馈线连接,从控制箱引出安装在控制箱旁边。视频摄像头及云台直接通过光纤或网线接入控制箱,从后台屏柜光纤交换机引出光纤通过地下室通讯箱内的光纤熔接盒,与每个控制箱相连接,最终组成光纤环网通信网络控制箱中安装有光纤环网交换机,组网连接时,控制箱采用手拉手连接方式,与后台屏柜的光交换机组成环形网络设计模式。
2.5 联合巡视执行
联合巡视执行主要包括,巡视任务下发、巡视执行、巡视过程监视等功能。通过与视频、机器人、无人机、变电站微气象装置等辅助设备开展API接口或者协议对接,实现巡视点位的同步、巡视任务下发、巡视过程监视、巡视环境监控等功能。
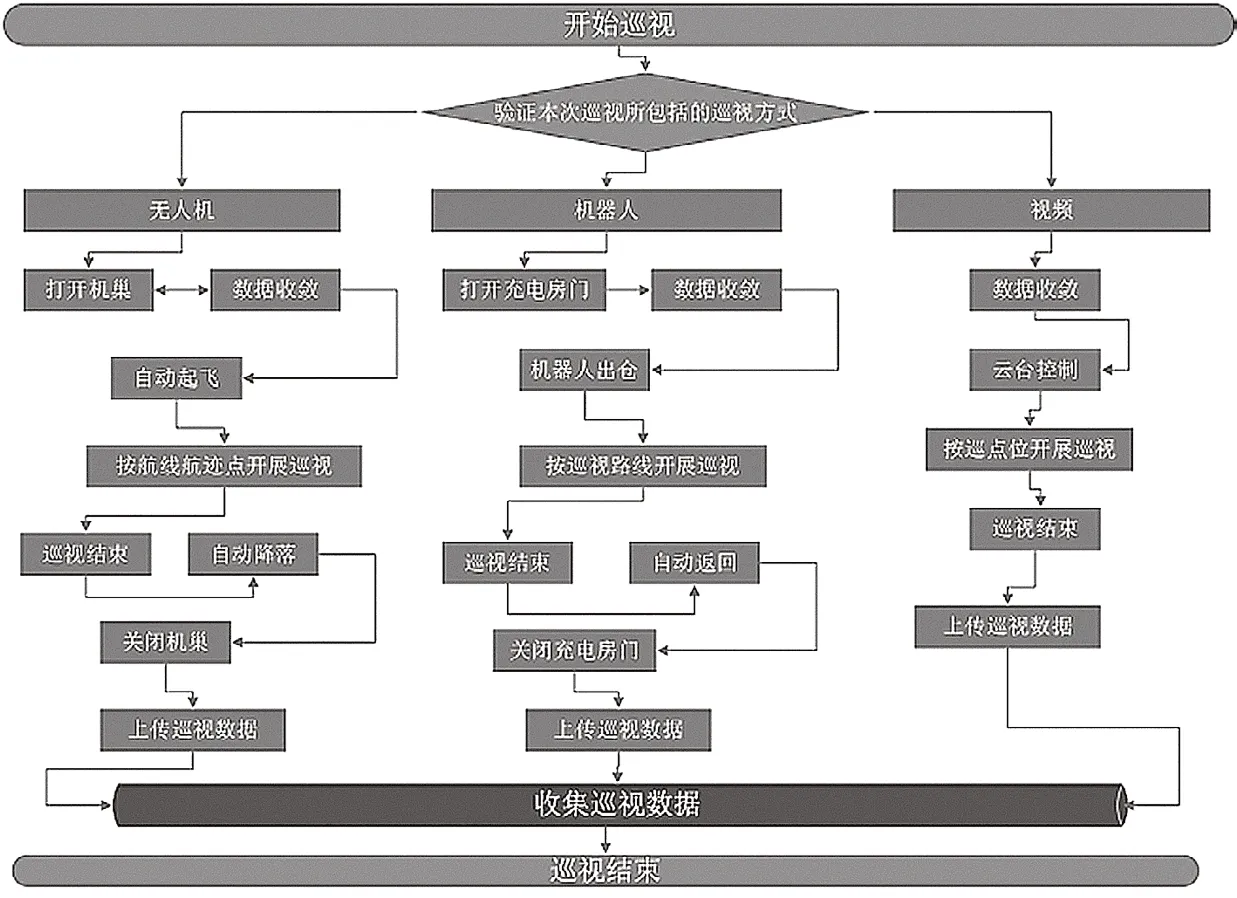
图4 联合巡视执行流程图
2.6 巡视结果一体化处理

图5 巡视分析模型图
巡视的目的是为了观测设备的是否存在异常或缺陷情况,分析其缺陷是否会影响电网运行异常。通过接入机器人、无人机、智能终端、摄像头及辅助设备数据的结构化及分结构化数据,通过开发缺陷识别模型、标记识别模型,获取表计的读数,将结构化数据与设备建立映射关系,通过关联设备历史缺陷库、设备隐患库、设备异常日志等信息,可得出一份覆盖面比较全的巡视分析报告。同样也可以通过巡视分析模块,针对以上结果集对巡视开展更为全面的分析,其中包括:机器巡视未覆盖的点位清单、机巡覆盖率、缺陷趋势分析、下一步终端需要巡视的任务计划等。
3 应用效果
基于变电站联合巡视系统的设计与实现,通过应用到某35 kV变电站,该站内共有2个电压等级,35 kV系统为单母线接线方式,有进出线2回,分别连接着110 kV某变和110 kV某变,2台主变压器,变电总容量为7000 kVA;10 kV系统为单母线接线方式,有10 kV出线6回。

图6 联合巡视布点
使用无人机采集变电站环境数据,通过计算机三维建模,形成了精细的变电站三维模型。在变电站列表中选择变电站,进入变电站的全景监控页面,通过界面左侧的设备台账模块可以选择查看相应设备的设备信息、预置点位信息,比如,选择35 kV1号主变压器,会弹出1号主变的简要信息,如设备厂家、出厂日期及型号等设备信息,在界面右侧有相关1号主变关联的设备缺陷及固有风险提示,此时可以针对以上设备综合信息开展预置点位及航线的的规划设计。变电站内设备多、分布广,呈高低错落布置,无人机需要在复杂的环境里来回穿梭,既要选取最佳拍照角度,又要兼顾与带电设备保持足够的安全距离,飞行导航控制难度非常大。与此同时,变电站内飞行环境复杂、定位精度要求高大,飞机失控撞上带电设备后果严重。有了高精度的三维模型之后,采取分层分级、优势互补的思路在模型中设置分行航线及取照航点,通过一个取舍,一个确保的原则开展点位设定工作。
全站需要巡视的点位有525个,因35 kV没有机器人,主要采用了“无人机+视频巡视”的方式。其中视频巡视共设16个点位,其中包含球机6个,云台3个,枪机7个,已覆盖了332个巡视点位巡视总用时20分13秒。无人机巡视共设置两条航线,共46个航迹点,共拍摄照片58张,航线长度151.61米,执行航线时间4分32秒。全站内需要巡视的点位,包括主变外观、表计、散热,站用变,断路器、隔离开关开合、绝缘子外观等,以及相对应的热成像,点位选取尽可能获取较大范围内的巡视,同时,无人机巡视解决了视频巡视的盲点,视频+无人机的联合巡视系统建成后,在没有机器人的情况下,基本覆盖站内的72%的巡视点位。
通过联合巡视应用后得到了良好的应用效果,实现管理流、计划流、数据流、设备流的多流信息汇聚及关联,然后将数据流、设备流与巡视终端匹配,实现巡视的数字化及智能化分析应用。
4 结束语
通过系统的实施,实现了巡视管理要求的数字化管控模式,构建变电站联合巡视系统,可关联巡视计划,联动视频、机器人、智能终端、无人机等巡视设备去完成对应的巡视任务,实现巡视结果统一输出、管控目标。保证了巡视工作的真实有效进行,为缺陷、风险点及检修管理等工作提供了及时可靠的数据,明显提高了变电站巡视工作的智能化水平。在企业内广泛开展变电站联合巡视系统的构建,将有效提供巡视效率及完整性,有利于提高变电运行的安全性、可靠性和稳定性,实现“设备状况一目了然、风险管控一线贯穿、 决策指挥一体作战”的目标。