人工智能的情境觉知:一种“在线”适应性表征
2022-01-15魏屹东
魏屹东



摘 要: 如何使机器人这种人工认知系统获得人类水平的智能,是目前人工智能发展的主要目标。要实现这个目标,人类智能的运作机制和模式无疑是人工智能模拟的最好模型。情境觉知理论的提出和发展,为实现这个目标提供了一种合理的框架和方法論。这就是关于情境觉知的通用模型、注意机制、情境觉知目标与心理模型的匹配要阐明的问题。“事件-控制-行动-适应性”模型是情境觉知理论的进一步发展,更突出了适应性表征特征。基于情境觉知理论开发的各种应用软件不仅是技术手段,更是方法论,体现在人工认知系统设计的方方面面。
关键词: 人工智能;人工认知系统;情境觉知;适应性表征
中图分类号:TP18 文献标识码:A 文章编号:1004-8634(2022)01-0109-(13)
DOI:10.13852/J.CNKI.JSHNU.2022.01.011
一个行为体,如机器人,若能够在即时境遇中适应性地行动,我们就应该承认它是有智能的。人工系统的适应性行为是通过人为地为机器设置情境或语境来实现的。之所以给机器设置语境,目的在于让机器能够像人类那样在语境中行动,从而实现适应性表征,进而产生意义和理解。这就是为什么纯粹的行为和信息是无意义的,它们只有在语境中才具有意义。因为语境不仅影响意义,它也需要正在思考的心智。也就是说,“我们的心智会为信息赋予语境和意义”。1 艾德雷斯(M. R. Endsley)的情境觉知(Situation Awareness,缩写SA)(也称态势感知)理论描述的就是一种动态系统的在线适应性表征,本质上是一种基于语境的模型,旨在为机器人这种动态认知系统设置一个人-机-环境交互的语境,2 使机器人能够在特定语境中适应性地表征。这是目前人工智能实现人类水平智能的一种新方法。
一、情境觉知的通用模型
所谓情境觉知是指,“在一段时间和空间内对环境中元素的感知,理解它们的意义,并在不久的将来预测它们的状态”。1 根据这个定义,艾德雷斯提出一个个体情境觉知的通用模型(见图1):个人对环境中相关因素的感知,正如由系统显示的或直接由感官决定的那样,形成了他或她的情境觉知的基础,其中动作选择和性能显示为单独的阶段,这将直接在情境觉知模块中进行。
图1表明,情境觉知模块有三个层次。层次1是对环境中元素的感知,这是实现情境觉知的第一步,即感知环境中相关元素的状态、属性和动态性。比如,飞行员会感知飞机、山脉或警示灯等元素及其相关特性,如颜色、大小、速度、位置等。层次2 是对当前情境的理解,这种理解是基于对离散的层次1元素的综合做出的。这意味着层次2不仅感知存在的元素,还包括根据相关的操作目标理解这些元素的意义。特别是当它将层次1的元素与其他元素组合起来形成格式塔时,决策者就形成了关于环境的整体图景,理解了物体和事件的意义。比如,战斗机飞行员必须理解,三架敌机彼此在一定距离内和在一定地理位置上的出现,预示了它们目标的某些方面。层次3是未来状态的计划,这是情境觉知的最高阶段,它是通过掌握元素的状况和动态以及理解当前情境来实现的。例如,如果知道敌机目前是进攻性的,并且在一定的位置,这允许战斗机飞行员预测敌机可能以特定的方式发起攻击。因此,情境觉知的基础远不仅仅是感知有关环境的信息,还包括以一种综合的形式理解这些信息的含义,将其与操作者的目标进行比较,并提供对决策有价值的环境来预测未来状态。在这方面,情境觉知是一个普适框架,适用于共享许多基本认知过程的广泛应用领域。
可以看出,该模型中的几个主要因素会影响决策过程。首先,如果给定相同的数据输入,个体获取情境觉知的能力各不相同,这被认为是个人的信息处理机制功能受先天能力、经验和训练的影响。其次,个人可能拥有某些预想的观念和目标,这些观念和目标可在形成情境觉知能力的过程中采取行动过滤和解释环境。再次,从系统提供所需信息的程度和形式来看,情境觉知也是系统设计的一个功能。所有的系统设计在传达所需信息的能力或与人类基本信息处理能力兼容的程度上都是不平等的。任务环境的其他特性,包括工作量、压力和复杂性,也可能影响人的情境觉知。也就是说,在动态的人类决策过程中,情境觉知作为系统操作中的一个主要模块,是基于决策的一个描述观(即情境觉知和不同个体、环境因素之间的关系在动态系统中得到描述)。在这些因素中,注意力和工作记忆是作为评价因素限制运算符从环境获得信息并解释信息,以便形成情境觉知的能力,而且心理模型和目标导向的行为被假设为克服这些限制的重要机制。
对于团体而言,其中的不同个人的情境觉知组成团队的情境觉知,而不同团体的情境觉知又可通过交叉或叠加组成更大的情境觉知,这与笔者提出的语境叠加模型是一致的,即不同语境进行交叉或叠加而形成一个特定的语境,1 只有这样,不同个人或团体之间才能形成一个新的语境,以便进行进一步的沟通和交流。
显然,决策过程作为动态的情境觉知系统,应该能够表征人-机-环境间进行的信息输入、加工、输出和反馈过程。然而,在实际生活中,人-机-环境组成的具体情境通常是变化莫测的,由于缺乏充足的时间和足够的信息来形成对这种综合情境的全面感知和理解,因而对未来情境的准确预测和定量分析就会大打折扣,但不会影响对未来情境的定性分析。艾德雷斯认识到,在操作的意义上,情境觉知模块的三个层次会产生一些错误,比如在层次1,个人可能只是无法在指定的任务中感知某些对情境觉知很重要的信息。在最简单的情况下,这可能是由于缺乏可检测性或对所涉信号的物理特性的可鉴别性,或由于系统设计失败而使信息不能及时提供给操作者,如在航空飞行中机组人员经常缺乏准确可靠的天气信息。在层次2,情境觉知的错误通常是由于无法根据操作者的目标正确地整合或理解感知数据的含义所致。在层次3,情境觉知可能因缺乏合作而导致错误的发生。即使一个情境被很好地理解了,如果没有一个高度发展的心理模型,个人可能很难准确地预测未来的动态。这涉及情境觉知的注意机制问题。
二、情境觉知的注意机制
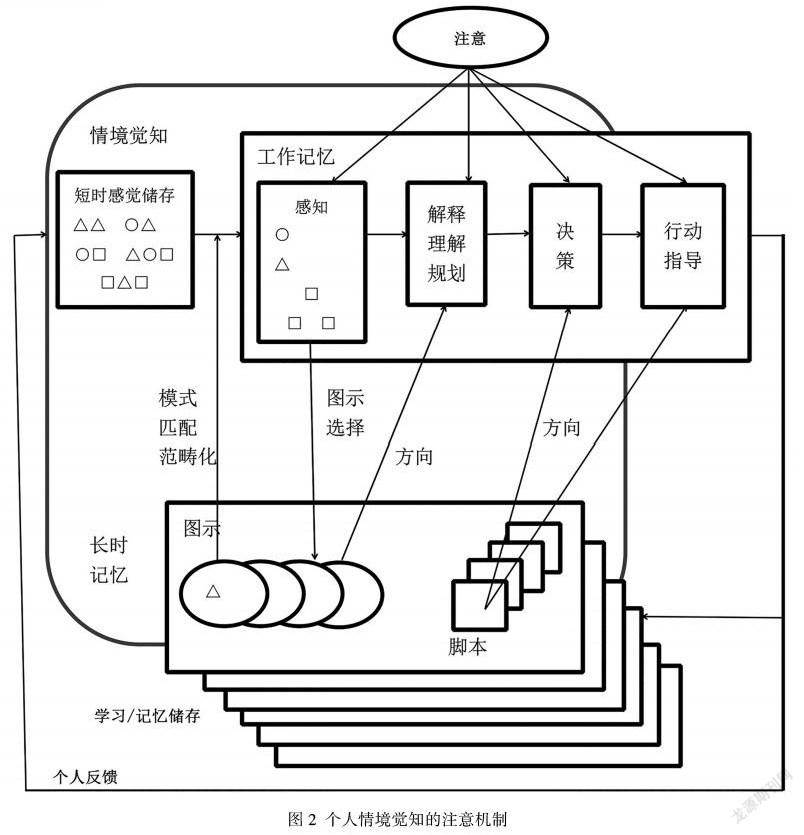
如果上述情境觉知通用模型是可行的,那么人作为动力系统,其心理机制是什么?根据大多数关于信息处理的研究,艾德雷斯认为,环境特征最初是通过预先注意的感觉存储并行处理的,其中检测到某些属性,如空间接近性、颜色、形状或运动的简单属性,为进一步集中注意力提供了线索。那些最突出的对象,基于预先注意的记录特征,将进一步使用集中的注意力得到处理,以最终实现感知。因此,那些线索的显著性将对环境的哪些部分最初被处理会产生很大的影响,那些被处理的部分将构成情境觉知的基础。或者说,短时感觉记忆、知觉、工作记忆和长时记忆的机制构成了情境觉知的基本结构2(见图2)。
根据认知心理学,在感知过程中部署注意力的作用是对个人同时准确感知多个事项的能力提出了某些限制,因此,注意力是情境觉知的一个主要约束。我们不仅要直接注意感知和处理所关注的线索,还要注意决策和响应执行的后期阶段。在复杂和动态的环境中,信息过载、复杂决策和多项任务所产生的注意力需求可迅速超过个人有限的注意能力。然而,复杂系统的操作者经常使用信息采样过程来规避这一限制。他们按照长时记忆中有关相对优先次序和信息变化频率的部分所决定的模式来快速处理信息。这一处理过程包括了感知、工作记忆、长时记忆、自动性和目标等因素,如工作记忆在其中起着重要作用,允许人们根据其他感知或目标信息修改注意力的部署,如对奇怪噪音的感知可能会促使战斗机飞行员查看发动机状态指示器,当涉及射击敌机的目标时,注意力可能主要指向该目标,因为对环境要素的有限关注,可提升他们成功完成任务的能力。因此,除了高度突出的线索吸引个人注意力外,人们还积极参与确定环境的哪些要素将成为他们的层次1情境觉知的一部分,方法是根据目标和对象以及基于长时记忆和工作记忆来引导他们的注意力。
图2清晰地表明,作为心理模型的情境觉知模块,包括了短时记忆的感觉储存、长时记忆的图示和脚本,以及工作记忆这些子模块,其运行机制是:注意力通过分别介入工作记忆中的感知、解释(理解、计划)、决策和行动子模块来影响情境觉知,而短时感觉储存→工作记忆→长时记忆和短时感觉储存形成一个反馈循环。在情境觉知模块内部,长时记忆中的图示指向整个工作记忆模块及其解释(理解、计划)子模块,而工作记忆中的感知又指向图示,形成一个内部小循环;脚本指向工作记忆中的决策和指导行动子模块,前者是后者的模板,如菜单。在实践中,长时记忆结构可用来规避工作记忆的局限性。这是因为长时记忆中知识的精确组织已经得到了多样化的表征,包括情境记忆、语义网、图式和心理模型,其中图式为理解信息提供了连贯的框架,包括高度复杂的系統组件、状态和功能。
一般来说,一个单一图示可用来组织几组信息,因此会有变量可填充正考虑情境的细节。作为一种特殊类型图示的脚本,为不同类型的任务性能提供了适当的操作序列。图式和脚本之间的联系能极大地促进我们的认知过程,因为个人不必在每一个回合都积极地决定适当的行动,而是会根据其相关脚本自动知道在给定情境下要采取的行动,如去饭店聚餐前上网搜索周围餐馆的情况。在笔者看来,艾德雷斯所说的心理图示就是一种心理模型,一种“人类能够生成系统目的和形式的描述、系统功能的解释和观察到的系统状态以及对未来状态的预测的机制”,1 这意味着专家会从表征物到抽象代码的转化中发展心理模型。从这个定义来看,心理模型可被描述为用于模拟系统行为的复杂图式,因此,心理模型可被看作某一系统的模式,如情境模型。
显然,情境觉知作为一种心理模型,可与描述系统模型的原型情境或状态记忆中的模式相匹配。这些原型分类可链接到能决定决策和行动性能的相关目标或脚本。这为图1所描述的单步“识别-启动”决策提供了一种机制。也就是说,这个过程被假定为一个关键机制,人们依据这种机制能够有效地处理大量的环境信息来实现情境觉知。因此,一个完善的心理模型提供了系统的相关要素的知识,这些要素在感知过程中可用于引导注意力和分类信息,如层次1情境觉知;可作为一种整合要素来形成对其意义的理解的手段,如层次2情境觉知;可作为一种基于其当前状态和对其动态的理解来预测系统未来状态的机制,如层次3情境觉知。
战斗机飞行员的例子可说明情境觉知的机制。飞行员可能会感知到几架被认为是敌机的飞行器,因为那些飞行器在特定的空间排列中接近形成层次1的情境觉知。通过对记忆中原型的模式匹配,这些单独的信息可被归类为特定的识别空中飞行器的形成,即层次2的情境觉知。根据一个内部持有的心理模型,飞行员能够为这种编队生成可能的攻击场景,当涉及具有他或她自己飞机的位置和飞行矢量的飞机即层次3的情境觉知时,基于这个高层次的情境觉知,飞行员可选择规定的战术(脚本),准确地决定应该采取什么规避策略。总之,感知是情境觉知获得环境信息的第一步,一旦感知成功,信息就被储存在工作记忆中,然后通过其内部运行机制处理从环境获得的信息。
在艾德雷斯看来,使用这些模型来实现情境觉知的关键在于个人识别环境中关键特征的能力,这种能力将映射到模型中关键特征的关键线索上。然后,该模型可提供更高水平的情境觉知,如理解和预测,而不用加载工作记忆。在为给定的原型情境开发脚本的情况下,用于生成替代行为并在其中进行选择的工作记忆的负荷会进一步减少。这种机制的一个主要优点是,当前情境不必完全像以前遇到的情境那样。这是分类映射的结果,即在情境的特征和已知类别或原型的特征之间的最佳拟合。最重要的是,由于人类模式匹配机制的优越能力,这一过程几乎是瞬时的。当一个人有一个发展良好的心理模型或特定系统的行为时,该模型将根据模型的投射机制提供对关键线索的动态关注方向、对环境未来状态的期望,以及在公认的情境分类和典型的行动之间的直接单步链接。
总之,图式和心理模型是在给定环境中被开发的训练和经验的一种功能。一个领域的新手可能只有重要系统组件和粗略规则或启发式的一个模糊想法,以确定他或她应该使用的行为与系统,然后根据经验,反复出现的情境成分以及反复出现的关联和因果关系将被注意到。这构成了早期图式或模型开发的基础。此外,情境觉知的一个重要方面还涉及个人对情境觉知的信心水平,因为人们对他们根据其可靠性获得信息来源的准确性有一定的信心。除了开发具有经验的心理模型外,还可以获得一种自动性的形式,而自动处理往往是快速的、自主的、毫不费力的,并且对有意识觉知来说是不可用的,因为它可在没有注意力的情况下发生。因此,某些任务的自动性可通过提供一种克服有限注意力的机制显著地使情境觉知获益。
三、情境觉知与目标和心理模型的匹配
根据通用模型,情境觉知是基于心理模型并且是目标导向的。这样一来,人们通常不认为情境觉知是一种仅仅为其本身而存在的结构。对于某些系统或任务的决策来说,情境觉知是非常重要的,因为它与正在寻求的语境和决策是紧密联系在一起的,而且从根本上与个人的目标联系在一起。我们知道,目标是动态环境中大多数决策的基础。多个目标可能同时被执行,而且这些目标有时可能发生冲突。在大多数系统中,人们不是来自环境的数据的无助接受者,而是根据其目标主动寻求数据,在艾德雷斯看来,这其中包括自上而下和自下而上两个决策过程(见图3)。
图3表明,从环境出发,人们通过感知经情境觉知的指导选择和系统模型的修正达到心理模型,心理模型与目标相互作用,并与计划、脚本发生关联,再共同指向行动,然后重新作用于环境。同时。心理模型还通过指导、理解、计划和期望作用于情境觉知,通过对关键特征的注意而指向环境。总的来说,目标将情境觉知模块和心理模型连接起来,使得心理期望与计划和脚本匹配,最终指导行动,达成目标。
从表征的角度看,这是一个目标引导的适应性表征过程,其中的自上而下和自下而上的过程构成一个反馈循环。根据艾德雷斯的看法,在一个自上而下的决策过程中,个人的目标和计划直接影响环境的那些被吸引到情境觉知发展的方面。然后,根据这些目标整合来解释那些信息,并形成层次2的情境觉知。对系统中的每个参数都进行观察本身并没有意义。然而,当它们在其所指关于以特定方式操作系统的目标的语境中被整合和评价时,它们变得有意义了。然后,基于这种理解决策者选择将感知环境与他或她的计划和目标活动相一致。同时,自上而下的过程连同自下而上的处理将一起发生。此时,环境中的模式可得到确认,这表明新的计划对于实现积极的目标或不同目标的激活是必要的。这样,个人的当前目标和计划可能会改变,以适应环境中的事件变化。自上而下和自下而上处理的这种交替过程允许个人在动态环境中有效地处理事件。显然,这个过程是适应目标和环境而表征的。
当然,这个过程也与心理模型和图式所承担的角色有关。这就是心理表征过程。图3示意的模型可形象地说明这种关系。系统的心理模型可被看作作为缓慢进化的组合记忆结构存在的。这意味着个人形成了一组与某些系统相关的目标。这些目标可被认为是人们希望实现系统的理想状态。同一组目标可能经常存在于给定的系统中,也可能经常发生变化。这要依环境的情况而定。事实上,一组目标可能与多个系统模型有关。个人的当前目标会被选为最重要的竞争目标,并采取行動指导选择一个心理模型。所选目标还将确定所采用的模型的框架和焦点。然后,个人使用模型的投射能力设计一个计划来达到目标。这其实就是笔者主张的语境投射,说到底,一个模型是基于特定语境而投射到目标上的。
在投射过程中,个人将选择一个计划,使其预测状态与目标状态最佳地匹配,也就是获得适应性表征。当脚本可用于执行选定的计划时,它们将得到使用;而当脚本不可用时,必须设计操作以促使计划的完成。同样,系统模型的投射能力将用于实现这个目标。作为一个持续的过程,一个人观察环境的现状,他或她的注意力通过目标激活的模型指向环境特征,并根据该模型进行解释。或者说,模型在表征中是作为中介工具解释对象的。这种表征工具是积极主动的,提供了对关键环境特征的现状和对未来事件之期望的未来预测。当这些期望与观察到的期望相匹配时,要实现的表征就完成了。当它们不匹配时,用于某些参数的值是不同的,或者发生了不该发生的事件,或者没有发生应该发生的事件,这向主体发出了一些错误的信号,并指明由于情境类型的变化、模型的修正或新模型的选择而需要更改目标或计划。
这个过程也可通过改变目标的相对重要性来改变当前的目标选择,因为每个目标都可以有控制情境类型的先行规则,其中每个类型都可调用其他类型。当多个目标相互兼容时,几个目标可能同时处于激活状态。当目标不兼容时,其所标识的情境类型的相关优先级别确定应该调用哪一个类型。同样,如果所提供的反馈表明计划没有按照其预测取得结果,或者当新的目标需要新的计划时,计划可能会被改变或选择新的计划。通过学习,这些过程也有助于创建更好的模型,以便在未来进行更好的预测。人工智能的深度学习也是如此。比如,在军事对抗的情境中,飞行员可能有不同的目标,像保持活着,击落敌机并轰炸既定的目标等。这些一般目标还可能有更具体的子目标,如导航到目标、避免被探测、避开导弹和使用导弹。飞行员将根据目标的相对重要性和当前情境进行分类,在目标和次目标之间进行选择。对飞行员来说,活着是一个优先目标。这个例子表明,当前目标将指示模型和框架处于激活状态。使用导弹目标的模型可能会直接关注关键环境特征,如飞行员和敌机的动态相对位置和当前的武器选择等。若这个模型处于激活状态,飞行员将倾向于寻找和处理环境的这些关键要素。比如,使用由此产生的情境觉知,并结合导弹使用模型,这会使飞行员能够确定如何最好地使用相对于敌机和导弹发射的时机,即计划和行动。而在实现这个目标的同时,飞行员还要注意可能指明应该激活新模型的关键特性,例如,如果飞行员发现了一个新的威胁,激活的目标可能会改变,以便飞行员停止操作导弹使用模型,并启动与该目标一致的威胁评估模型。所选择的模型,如果足够详细,将用于指导情境的理解、未来事项和决策。
显然,情境觉知与其目标和心理模型一定是匹配的,其表征一定是适应性的,否则,情境觉知的目的就难以达成。事实上,情境觉知这个概念本身就蕴含了认知与其所在境遇的一致性和适应性。如果不这样,情境就没有必要出现了。
四、情境觉知的适应性表征
综上表明,情境觉知是一种强大的人工认知范式,可有效地利用移动设备如智能手机日益增长的适应性能力。在计算机科学和人工智能中,一种稳健的、基于一般规则的方法是采用语义网推理、模糊逻辑建模和遗传算法来分别处理情境推理、不确定输入处理和对用户行为的适应性表征,能让智能机器人能够像人那样感知地行动,如可预测用户的需求。然而,要实现情境觉知,基本手段离不开语境的使用,即使用所有相关数据和信息,如用户在空间和时间上的位置、周围的事物和事件等。根据科斯塔等1 提出的“事件-控制-行动”(Event Control Action,缩写ECA)模式,基本情境模型可用条件规则来表征:
如果(语境条件)那么(情境)(即if-then 推理形式)
条件部分是由表示基本数据或传感器样本的语境变量表征条件的逻辑组合而成的。例如,检测一个人是否进入实验室的传感器,这是一个人随身携带的识别卡。这种组合条件模拟了一些在应用程序领域或其环境中感兴趣的事件。出现上述语境条件可能意味着“有人进入实验室”。奇米诺等2 将适应性引入ECA模式,即将其扩展为“事件-控制-行动-适应性”(Event Control Action Adaptation,缩写ECAA)模式,旨在解决语境变化时情境的相关信息频发的问题。这等于将适应性嵌入了ECA模式,因为说到底,一个行动若不适应其环境,那它就失去意义了。在笔者看来,这就是用适应性改造ECA,旨在让人工认知系统能够融入变化的环境(“if-then”+ECAA组成的模式见图4)。
图4展示了ECAA模式的结构、顶部模块及其间的关系。不同方框分别表示功能模块和信息模块。基本组件是语境处理、推理引擎、情境评估和行为调优模块。显然,ECAA模式反映了情境觉知应用程序的主动性以及适应用户特性的必要说明。语境处理模块检测发生在语境源中并对触发一个或多个规则具有重要意义的事件;推理引擎模块监视规则条件,并在满足条件时触发更新操作;行为模块提供高级行为描述(条件规则);情境评估模块实现情境排序、标识和通知的操作。
对于情境觉知控制的通用软件构架来说,情境觉知伺服的应用程序控制器通过情境推理器模块访问用户所处情境或当前语境,这是一种独立于域的网络服务,它根据ECAA模式引导推理的控制流程。具体说,情境推理通过通用界面收集来自语境源的数据;加载知识库,如领域范畴、规则和语言变量;在评估语境条件后填充情境;更新情境或语境历史以调整语言变量。而由专门的语境源模块提供的活动包括:感知,即从传感器设备收集源信息,如从GPS设备收集位置信息(纬度、经度、速度);聚合或融合,即观察、收集和组合来自提供者的语境信息,如将来自GPS和射频识别(RFID)设备的位置信息组合起来,分别用于室外和室内传感。高层模块提供的活动包括:推断,即对语境信息的解释,以获得另一种类型的语境信息;聚焦或例示,即对特定实例和特定情境的语境信息的投射,如侧重于用户议程中下一次任务所表征的时间窗口。
接下来更具体地考虑情境推理模块的组件及其功能。情境观察器负责观察语境源组件感知到的语境变化,并根据行为描述触发产生情境评估的动作。行为描述由范畴、语言变量和从语境规则描述情境的规则组成。规则引擎(推理器)能够处理知识库并触发规则。这里有两种不同的推理器——语义推理器和模糊推理器,其活动由情境观察器来协调。情境观察器在通过语境源感知到语境条件的发生时,它有能力检查知识库中是否有这些更改引发的规则,并协调两个引擎的执行。然后,生成的情境被情境觉知应用程序用于调整其功能,并由语境历史采样器记录。语境历史通过语言调谐器被用来适应特定用户与语言变量中使用的语言术语相关的含义。
需要指出的是,图4只是对情境觉知功能模块的总体说明,而具体解决情境觉知问题的通用方案还应包含组件、组件的功能、组件的关系以及一些可描述的理想属性,诸如:为设计原则提供一个共同的词汇表和理解过程;提供一种指定情境觉知结构的方法;支持具有定义属性的软件智能体的构建;构建复杂和异构的情境觉知中间件;协助管理软件的复杂性。该解决方案将语境管理问题(如语境感知和处理)与语境变化的情境推理脱钩,即在离线的情境下进行推理和预测。
当然,构建一个领域范畴是一项既困难又昂贵的事情,因为我们很难从问题域中提取相关知识并以适当的方式表达。一般来说,初始原型是基于解释性文本或与领域专家的访谈而开发的。然后,通过与专家和系统的潜在用户合作进行测试和修改,可对原型进行改进。比如,语境范畴处于情境推理器的核心,允许将语境信息连接到具体情境。
在语境范畴的设计中,奇米诺等认为设计者一般会面临两个主要问题:一是表征系统知识库中的一般信息和特定信息;二是表征网络范畴语言中的模糊信息。更具体地说,语境范畴被分为一个对一般概念有效的上层范畴和一组较低层的特定域范畴,它详细描述低层概念及其属性的上层范畴。这样一来,上层范畴对于许多应用场景都是有效的,可被认为是专门针对不同领域的稳定参照系。上层范畴是以自下而上的方式设计的,从基本的领域概念及其关系开始,通过对领域专家的访谈来强化。
一般来说,上层语境范畴包括四个方面:(1)用户(拥有移动设备和日历的人),由他们与其他用户间的空间关系和位置确定,比如接近于、远离于等。(2)用户有一个名字,他/她可以静止或移动,也有一个当前的时间,可处于一个或多个情境下。(3)日历包含由用户组织的约会,并计数参与者,有约会,约会位于一个地方,并按間隔安排,其中有开始时间即启动时间和结束时间。(4)确定时间关系,如在-后,在-前,在-中间等。总之,上层语境范畴通常是以语义网形式表征的,如网络范畴语言OWL,1 也可用命题逻辑、概率逻辑、模糊逻辑和贝叶斯网表征,或者是它们的组合表征。这些表征方式在人工智能中都是常见的。比如,关于空间中物体接近关系的具体表征,其时间区间相关性质的抽象表征,模糊集相关性质的模糊范畴2 的抽象表征,以及模糊属性空间接近的具体表征。这涉及情境推理的表征语言问题。
在情境推理中,语境源是一个系统中由专门模块处理的原始语境数据,这种低层处理由语境源模块包括定位系统、用户日历、地理地图等表征,最终建立语境数据库。情境推理是基于语境数据库的。这说明建立数据库和知识库对于情境推理的重要性。情境推理器通过观测器设计模式封装的知识处理,协调内部引擎的通信,并允许使用独立的完全符合标准的机制来控制网络语义和模糊引擎,如基于OWL。
根据ECAA模式,情境推理过程涉及三个模块——情境观测器、语义推理器和模糊推理器。在情境观测器中,观测器模块引导其他模块的执行流程。观测器充当模糊推理器和语义推理器之间的桥梁,并通过语境收集模块获取语境源,该模块负责收集与语境相关的在线输入数据,如用户的当前位置。这些数据由语境维护器模块用于处理实际条件的集合。实际条件是表征可能模糊范畴关系实例的对象模型,如事件、控制、行动、适应性的组合。
在实践中,这种模型已应用于实际业务,如典型商业情境下的药学顾问。通过对药学领域专家的一系列访谈,我们可以建立商业案例的知识模型。特别是,上层语境范畴已经扩展到特定域的范畴,能识别更好地描述商业案例的概念和概念之间的关系。此外,还有不同的情境需要确定、需要重新定位语义规则,比如会议计划、招标会的会前会议、正在举行的会议、会后会议、医院会议、招标和用餐等,之后,针对每一种情况,从访谈专家的实际需求出发,确定一套可能的任务和相关资源。因此,上述任务范畴已经用特定域概念和关系进行了扩展。
概言之,识别用户参与的情境会导致在某一时间更好地识别用户的需求。在ECAA模式中,情境是由语境条件的逻辑连接导出的。领域知识是通过范畴和语义规则来表达的,以保证可移植性、可集成性和可扩展性。这样,软件智能体就可管理自己的语境源,方便地相互通信。整个系统依赖于形式表征,避免知识库的不一致问题。语境条件可能受到不确定性的影响,比如由于传感器测量不准确或人类表达的概念不精确。采用模糊逻辑有效地控制不确定性,可以使语境条件得到更准确的处理。因此,这是一种基于历史语境、使用模糊逻辑、语义规则和遗传算法的适应性表征方法,可自动调整规则库以适应用户的实际行为,提高情境评估的准确性和响应性。
五、情境觉知的方法论意义
情境觉知理论源于自然认知系统(人脑)进而推广到人工认知系统的情境。从适应性表征来看,不论是哪种认知系统,只要它能够适应目标和环境进行适当表征,就是可行的。笔者业已发现并论证,适应性表征是这两种系统的共同特征,也是表现出智能所必需的。1 在这个意义上,情境觉知的实质就是适应性表征,其方法论意义就体现在情境觉知理论的发展和应用中。
第一,由情境觉知发展出的“情境觉知全局评估技术(SAGAT)”可用于评估基于操作者理解的动态系统的情境觉知行为,如对航空系统的情境觉知的评估。2 这是一种以人为中心的自动化水平评估(human-centered level of automation,缩写LOA),一种动态控制系统中传统的、以技术为中心的自动化设计的替代方法。这种人控LOA的目标是通过考虑操作者和技术能力来提高人-机交互性能。目前已经建立了LOA分类法,让人机有效地结合,包括监测系统变量、生成过程计划、选择“最佳”计划和实施计划。其中操作者的情境觉知是使用SAGAT测量的,比如在民航系统中,情境觉知被普遍认为是民航环境成功的关键。3 在情境觉知的测量上,4 比较不同情境觉知可用于空中交通管制有关的情形,包括模拟和在操作环境中的研究。一项关于航空高速公路(Highway-In-the-Sky,缩写HITS)空中展示对飞行员情境觉知的影响研究表明,5 HITS显示仪提供课程指导的飞行员使用通过空中路径的透视视图,这是通过全球定位系统(GPS)实现的,而且强大的图形显示系统能够提供实时的HITS描述的驾驶舱。一个基于SAGAT测量情境觉知的模拟训练演习初始计算模型,模拟了军事人员恢复中心的实际生活事件,解决了共享情境觉知建模团队如何协同工作的问题。6 这个初始模型探讨了五个因素(社交网络距离、物理距离、等级相似性、分支相似性和经验相似性)来共享情境觉知的预测效果。这些实验表明,SAGAT具有良好的情境觉知敏感性。
第二,情境觉知是在动态和共享环境中进行的操作者之间的互动。比如关于运输活动中的意图识别和情境觉知涉及驾驶汽车或飞机的情境觉知,1 这些交互可能会修改语境。对这种动态情境的认识意味着既要确定其他人目前的行动,又要预测他们的意图。研究表明,在活动期间建构过程支持操作者的情境觉知,并为未来实施的信息系统提出了新的要求。建构情境觉知的过程必然涉及操作者的心理工作负荷,2而心理工作负荷和情境觉知都是评估操作者执行和控制动态复杂任务的实际需要的结果。心理工作负荷是指通过执行所需的与任务相关的心理加工而对人类操作者的认知加工能力所付出的代价,情境觉知则是操作者对当前形势的理解,比如,设计一个新目标或修改一个现有目标通常是减少操作者的心理工作负荷同时又增加操作者的情境觉知。
第三,情境觉知为普适计算和环境智能建造了以智能方式与环境特别是用户交互的系统。一种基于感知和语境推理的情境觉知的综合方法表明,3 为了解和反映当前情境,用户通常必须理解和处理描述环境状态特定方面的一组复杂特征。迄今还没有标准的机制来模拟和推理复杂的境遇。综合方法描述了一种全面的情境觉知,涵盖了语境捕获、语境抽象和决策的整个过程。这种解决方案包括基于范畴的感知和推理环境描述、感知设备和推理组件的控制,以及将这些组件整合到决策应用中,将这些技术组件嵌入到概念架构和通用框架中,就能够轻松和灵活地开发情境觉知系统,基于会议室场景方法是其典型例子,2020年新冠病毒期间流行的视频会议和视频课程就是基于情境觉知理论开发的。
第四,情境觉知让智能体能够在高度动态的环境中确定感知信息的意义,并分享由此发现的知识。情境觉知的上层范畴研究表明,4 基于范畴的情境觉知方法促进了上层范畴,为协作智能体和信息源提供了一个共同的词汇表或知识库,提出了一个评估框架来阐述其缺失的特征,并发展出更好理解所涉及的不同概念的方法。在笔者看来,设置上层范畴等于是设置了相关语境,比如语境范畴(context ontology)就是在普适计算环境中使用网络范畴语言建模语境的一种方法,5 其核心概念语境范畴是语境实体及其子类,包括实体、位置、人和活动。在评估框架中,语境范畴并不模型化属性、事件和情境特别是整个语境,人和计算实体可粗略地映射到對象。由于情境不是明显地被模型化的,也就没有情境类型和情境不作为对象被处理的情形。
第五,情境觉知作为一种范畴驱动方法,可解决信息过载问题。信息过载是大规模控制系统的人类操作者面临的一个严重问题,如道路交通管理领域遇到的问题。这类系统的操作者有可能缺乏情境感知,因为现有系统只注重在图形用户界面上提供现有信息,从而没有及时和正确地识别、解决和预防危急情况,如道路拥堵。鉴于基于范畴情境觉知方法是以语义丰富的知识模型出现的,要么是高度域-特异的,要么是域-独立的,可重复使用方面存在缺陷。一种基于范畴驱动的信息系统——“Beaware!”可提高操作者的情境感知能力。6 与现有的域-独立方法相比,“Beaware!”的范畴引入了观察到的真实世界对象之间时空原始关系的概念,从而提高了框架的可重用性。然而,范畴驱动情境的预测是需要优化的,以支持大规模控制系统中的情境觉知系统,这就是使用范畴和规则来优化预测。1 道路交通管理领域的案例揭示,许多现实世界的情境演变的搜索空间可大大减少,证明这种方法是有效的。例如,运用任务和人为误差分析对交叉口关键驾驶情况进行情境觉知评估,2 传感器和跟踪技术的快速发展,使得部署先进的驾驶员辅助系统成为现实,从而大大减少了因信息过载而发生交通事故的概率。此外,“Beaware!”也适用于情境驱动的情境觉知玩令牌游戏的情境预测网。3 为了提高预测的整体质量,同时保持建模的可行性,一种基于彩色Petri网的域-独立方法补充了范畴驱动的情境感知框架“Beaware!”。这些情境预测网可自动生成,并允许通过利用范畴知识在对象特征和关系之间的相互依赖方面提高预测精度。
第六,情境觉知将模糊逻辑和语义网相结合,通过消除不确定性来实现情境感知。在互联网服务推荐中,移动互联网的迅速增长让我们有大量的资源可用。到目前为止,用于定位资源的通用机制,如浏览和搜索,在帮助用户移动方面不再有效。事实上,用户的个人信息空间非常大,而移动设备的交互能力有限,比如,一个情境觉知框架以积极主动的方式提供个性化资源,4 它通过利用以范畴和语义规则表征的领域知识来推断用户的当前情况,这些知识分别用网络范畴语言(OWL)和语义网规则语言(Semantic Web Rule Language,缩写SWRL)表征。在某些语境规则条件下,不确定性是通过模糊控制语言(Fuzzy Control Language,缩写FCL)定义适当的语言变量来处理的,模糊系统的标准表征用于不同实现之间的数据交换,并采用有目的的范畴和规则的自适应编码。不确定条件会带来不同确定性程度的多个情况:这些程度被用来为同时发生的情境分配等级,最终情境被连接到一组相关资源并被推荐给用户。
第七,情境觉知可用于自主系统的情境觉知的评估。自主系统在专门问题领域是非常成功的,但它们的感知、推理、规划和行为能力通常是出于适应特殊的目的而设计的。例如,机器人智能体以一种由人类设计者预先定义的方式(为其设置语境)感知其环境。智能体并没有表现出一定的感知行为,因为它们实际上以为这样做是合理的。随着自主性水平的提高,以及智能体操作的时空范围的扩大,更高层次的情境分析和评估变得至关重要,如评价自主系统情境觉知的标准——感知、理解和预测能满足动力学方法,5 可应用于评估具体场景,如机器人排除障碍的评估。特别是对于不确定性,情境分析和评估给出了无知推理的动力学信息模型,包括无知推理、智能体感知模型、信息相关性评估、信息动力学模型和相关时空推理能力,以及获取自身传感器以外信息的社会能力,而且所提出的逻辑路径场景表明,环境属性几乎没有相关的信息可显著提高自主智能体的性能。未来的工作将解决基于动态决策网络和信息价值理论的情境感知及其度量的理论基础。
最后,情境觉知本质上是完善决策过程的一种自然主义方法。例如,一项基于自然主义决策开发的海军战术决策原型的决策支持系统(decision support system,缩写DSS),6 通过基于识别-启动和基于解释的推理过程以及对舰载作战信息中心(Shipboard Combat Information Center)海军战术军官面临的决策问题的认知分析,发展出用于支持关键决策任务的显示器。在高强度、模棱两可的情境下进行的基线测试表明,经验丰富的决策者没有很好地为当前系统服务,他们的不良表现显示出定期丧失对情境的认识。一项研究描述了八个专家海军战术决策团队,他们单独使用其当前系统,或者与原型DSS一起使用。当团队有原型DSS可用时,要澄清战术局势的通信大大减少了,但较在场景早期发现的关键接触要多得多,较针对迫在眉睫的威胁采取的防御行动要多得多。这些发现表明,原型DSS提高了指挥官对战术形势的认识,这反过来又有助于提高信心、减少工作量,让行动表现更有效。
六、结语
综上,情境觉知理论是一种复杂系统决策模型。在自然主义决策的基础上,个人的情境觉知被认为是决策过程的关键。就个人具有同一性而言,情境觉知是一个通用结构,可适用于各种各样的环境和系统,而且是由个人对动态环境的知识状态组成的。也就是说,情境觉知整合了相关要素的感知、这些要素在于与操作者关联和组合之含义的理解,以及基于这一理解对环境未来状态的预测。作为一种为使人工认知系统具有那样的感知能力的理论,无论在理论上还是实践上,都取得了令人瞩目的成就。然而,情境觉知理论显然还没有达到人们所期待的结果,还没有达到人类水平的智能和感知,这是该理论今后要进一步深入研究的问题,如与语境觉知结合可望有所突破。
Abstract: How to make robot, an artificial cognitive system, acquire human-level intelligence is the main goal of artificial intelligence development at present. To achieve this goal, the operating mechanism and mode of human intelligence are undoubtedly the best model for artificial intelligence simulation. The development of situation awareness theory provides a reasonable framework and methodology for achieving this goal. This is the problem to be clarified about the matching of the general model, attention mechanism, situation awareness goals and psychological models. The event-control-action-adaptation model is the further development of situation awareness theory and highlights the characteristics of adaptive representation. All kinds of application software based on situational awareness theory are not only technical means, but also methodology, which are embodied in all aspects of artificial cognitive system design.
Key words: artificial intelligence; artificial cognitive system; situation awareness; adaptive representation
(責任编辑:苏建军)
