卫星天线扫描驱动机构的一体化设计及力学仿真
2022-01-15熊一帆刘明利李宁杰
熊一帆 龙 澄 刘明利 刘 瑞 李宁杰
卫星天线扫描驱动机构的一体化设计及力学仿真
熊一帆 龙 澄 刘明利 刘 瑞 李宁杰
(上海航天电子技术研究所,上海 201109)
卫星天线扫描驱动机构的刚度、精度及固有频率直接影响着载荷分系统的可靠性、精度和寿命。本文设计了一种由步进电机、行星减速器、旋转变压器串装的一体化轴系驱动机构;首先分析了驱动机构的轴系方案选型布局,再对驱动机构的轴系设计进行了刚度分析与指向精度分析,为轴系设计提供了理论依据;最后对驱动机构整体进行了力学仿真,进一步验证了结构设计的合理性。
驱动机构;轴系;刚度分析;精度分析;力学仿真
1 引言
卫星天线扫描驱动机构是星载天线实现扫描功能的执行机构,用于载荷天线在轨转动,改变微波波束方向,从而变换载荷系统的工作区域。扫描驱动机构是载荷天线探测头部与卫星平台间的连接支撑机构,需要在轨持续转动,是影响载荷分系统使用寿命和可靠性的主要部件[1,2]。
目前国内外对卫星天线扫描驱动机构做了许多研究,大多研究关注在满足特定需求的扫描驱动结构设计、伺服控制系统设计、长寿命高可靠性分析等方面,而对于驱动机构轴系刚度及指向精度等研究分析较少。如中国科学院长春光学精密机械与物理研究所通过轴系方案的选择分析、环境适应性设计以及刚度设计,设计了一种满足月基转台轴系[3];中国空间技术研究院西安分院王辉等研究分析了一种天线扫描机构转动单元的轴系刚度并进行仿真验证,为天线扫描机构的设计和优化提供了理论基础[4];上海航天电子技术研究所刘高峰等对风云三号中微波成像仪的扫描驱动机构进行了使用寿命和高可靠性分析,并据此提出了提高在轨使用寿命与可靠性的工艺改进措施[5]。
针对卫星天线扫描驱动机构在轨工作中要保持高旋转精度、高可靠性长寿命的需求,设计了由步进电机、行星减速器、旋转变压器与旋转主轴一体串行装配,提高驱动机构精度和寿命。根据扫描驱动机构的性能指标,对驱动机构的轴系方案进行了选型分析,并对轴系刚度和指向精度进行了建模分析,验证了轴系设计的刚度和指向精度满足要求。最后通过力学仿真进一步验证了扫描驱动机构设计的合理性。
2 驱动机构设计
2.1 驱动机构设计指标
本文中的扫描驱动机构应用于某毫米波温湿度计探测仪,能实现每个周进行场景观测、热源定标、冷空定标。扫描驱动机构的旋转精度、指向精度决定了探测仪的扫描精度。考虑到扫描驱动机构工作特性,扫描驱动机构的设计指标要求如表1所示。
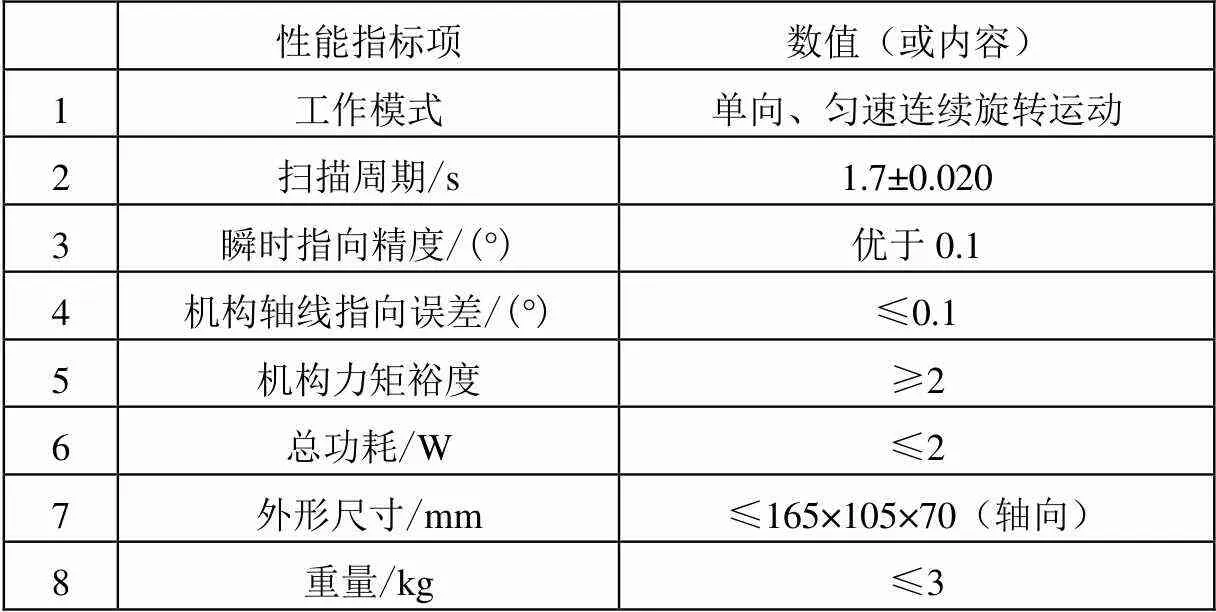
表1 扫描驱动机构的指标要求
2.2 驱动机构结构设计
基于上述设计性能指标要求,卫星天线扫描驱动机构需整体布局紧凑,且各类传动部件和测角元件应选型合理。设计的卫星天线驱动机构的结构如图1所示,由步进电机、行星减速器、旋转变压器与旋转主轴一体串行装配,轴系结构采用一体化设计方案。
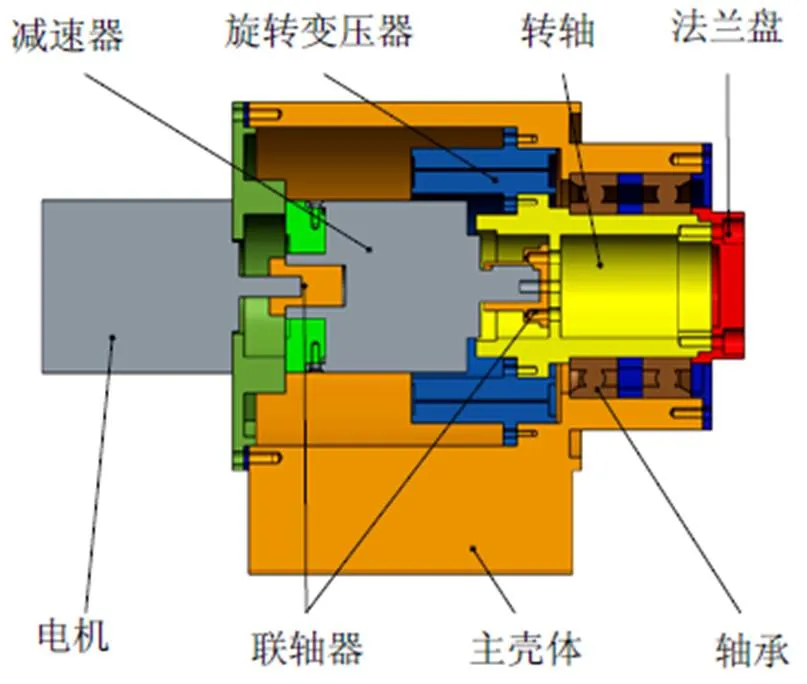
图1 卫星天线扫描驱动机构结构示意图
该设计采用一体化轴系设计方案,减少了各部件间的连接,提高了驱动机构的旋转精度与可靠性,达到结构紧凑、质量轻、体积小的目的[6]。其中,总体方案的设计主要集中在电机、测角传感器、减速器等元器件的选择、滚动轴承选型与安装形式,以及转轴轴系设计。合理选择各元器件可有效保证扫描驱动机构的机电性能,提高其使用寿命与可靠性。轴承的选择与安装形式直接影响轴系刚度,转轴的设计依据由各器件选型及安装形式而定。故这三者相辅相成,需不断优化设计。
根据驱动机构设计指标瞬时指向精度高、低速平稳的要求,本设计选用比较成熟可靠的步进电机作为驱动动力源。步进电机体积小、质量轻、无累积误差,尤其是低速时性能良好,且在国内空间机构中已广泛使用[7]。由于本扫描驱动机构转速较低,为35.3r/min,故使用低减速比的行星减速器。考虑到定位精度和可靠性要求,因此采用结构简单、成本低、检测精度高、环境适应力强的旋转变压器作为测角元器件。旋转变压器使步进电机形成闭环控制。
3 轴系设计分析
3.1 轴系刚度[8~12]
为提高轴系旋转精度和承受轴向载荷能力,支撑轴承选用一对角接触轴承。角接触轴承采用背对背配对安装,以提高整个轴系刚度和轴系抗倾覆能力。其中,角接触轴承选用719系列,该系列轴承相对于其他类型角接触轴承拥有更多的滚珠数目和更大的轴径,有利于提高轴系的刚度。同时,由于扫描驱动机构是低速运转,故轴承接触角选择25°类型,进一步提高轴系轴向负载能力与轴系刚度。轴承采用定位预紧的方式,调整轴承游隙,确定预紧力,以提高轴系刚度与旋转精度。而预紧载荷的大小,应根据应用工况(载荷、速度、设计参数)和期望得到的工作状态(最大寿命、最好刚度、低的热量产生等)确定。本设计针对驱动机构负载、转速、设计指标及刚度要求分析预紧力。
根据Hertz接触理论,对于角接触球轴承弹性趋近量与载荷的关系为:


其中:Ci、C为内外圈接触处弹性趋近量系数,C为材质系数,D为滚珠直径,f、f为内外沟曲率系数。
通过查表并计算得:Ci=1.6×10-4,C=1.9×10-4。由式(2)得弹性变形常数=2.458×10-4。初步设定预紧力为10N,由式(1)得该预紧力下轴承的接触刚度为:

由图2所示轴承组简化模型可知,转轴倾斜对应于在接触面法线方向产生1的弹性变形,其间关系为:

其中,为轴承滚珠到轴线距离,设计值为22.5mm;为两轴承的间距一半,设计值为7.5mm。

其中,每个刚度在与外沟道压紧时必与内沟道松开,以及轴承本身的对称性,得到该支承方式的外界干扰力矩:
则由式(4)~式(6),该支承方式的抗倾斜刚度:


根据动量矩定理,外力矩与动量矩的关系为:


其中:I、I为惯性积,I为负载绕Z轴的转动惯量。
负载转动惯量测得:I=15312kg·mm2,I=1.838×10-3kg·mm2,I=37956kg·mm2。
忽略I,由式(8)、式(9)得:



3.2 轴系指向精度分析
驱动机构在旋转方向上的指向精度由控制精度决定,而偏离理想轴线指向的角度偏差则由结构的机械精度决定。轴线指向偏差产生的原因是由轴承、轴承安装孔和轴系制造误差引起,当然高速运转的轴系还受动不平衡量和支承刚度综合影响。对于后者,因驱动系统的运转速度较低,可以不予考虑。

4 力学仿真分析
4.1 驱动机构模态分析
扫描驱动机构固有频率是整机设计的重点考核特性之一。当驱动机构固有频率过低则整机刚度不足,易受振动或冲击破坏,故设计完成后需进行模态分析,考核整机的刚度性能。

图3 驱动机构网格划分
首先对扫描驱动机构建模分析,简化模型,去除不必要的零件(如螺钉等)。再则将轴承滚珠简化为四根沿径向分布的弹簧,其他机构之间通过定义接触实现相互作用。扫描驱动机构的整体有限元模型如图3所示,其采用四面体单元网格进行划分,网格数13019,节点数301795。
对于整机的力学性能影响最大是扫描驱动机构的一阶模态,因此只取前四阶模态分析。扫描驱动机构整机前四阶模态分析结果如表2所示。

表2 扫描驱动机构前四阶模态结果
驱动机构前四阶模态如图4所示。

图4 驱动机构前四阶模态
由仿真结果可知,扫描驱动机构的前四阶固有频率较高,其1阶固有频率远大于设计指标基频100Hz,在发射和在轨运行过程中不会发生共振,满足设计要求。
4.2 驱动机构正弦响应分析
设计阶段时,驱动机构的正弦响应分析可以获取所关注部位的加速度响应,判断结构动态放大特性,指导结构构型设计;并可以获取关注结构的应力、应变、力,校核结构强度,指导结构设计。本设计在低频正弦仿真中,主要考察的振动频率范围为2~100Hz,三个方向的载荷幅值9g,扫描速率2oct/min-1,有限元分析中壳体的底面采用固定约束。
分别对、、方向进行正弦振动仿真分析,在2~100Hz内找出驱动机构整机及各零件的加速度响应,验证是否与整机存在共振放大效应;并得到最大应力集中点,进行强度校核。
通过仿真分析得方向的正弦响应分析中最大加速度响应,最大加速度响应均出现在振动频率为100Hz的仿真中,、、方向的100Hz正弦响应最大加速度响应云图如图5所示。
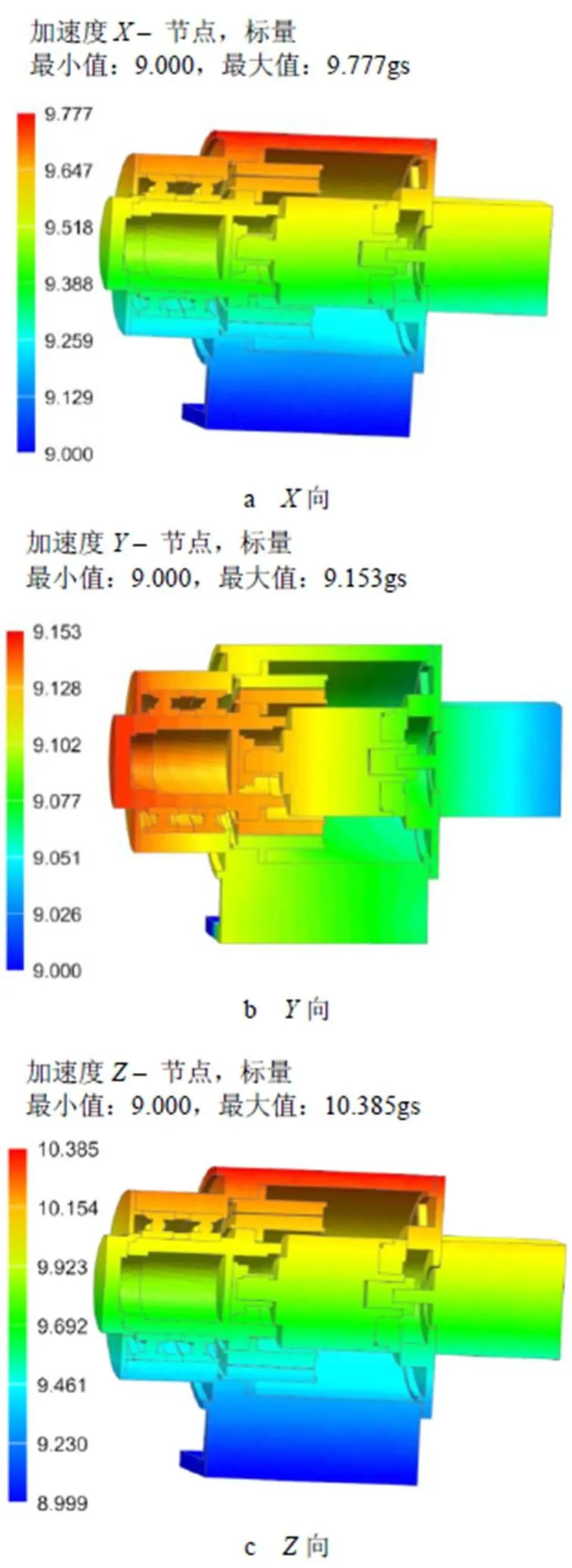
图5 最大加速度云图
再通过对、、方向的正弦响应的最大应力进行分析,结果得、、方向的最大应力均也出现在振动频率为100Hz时,、、方向在振动频率为100Hz时正弦响应应力云图如图6所示。
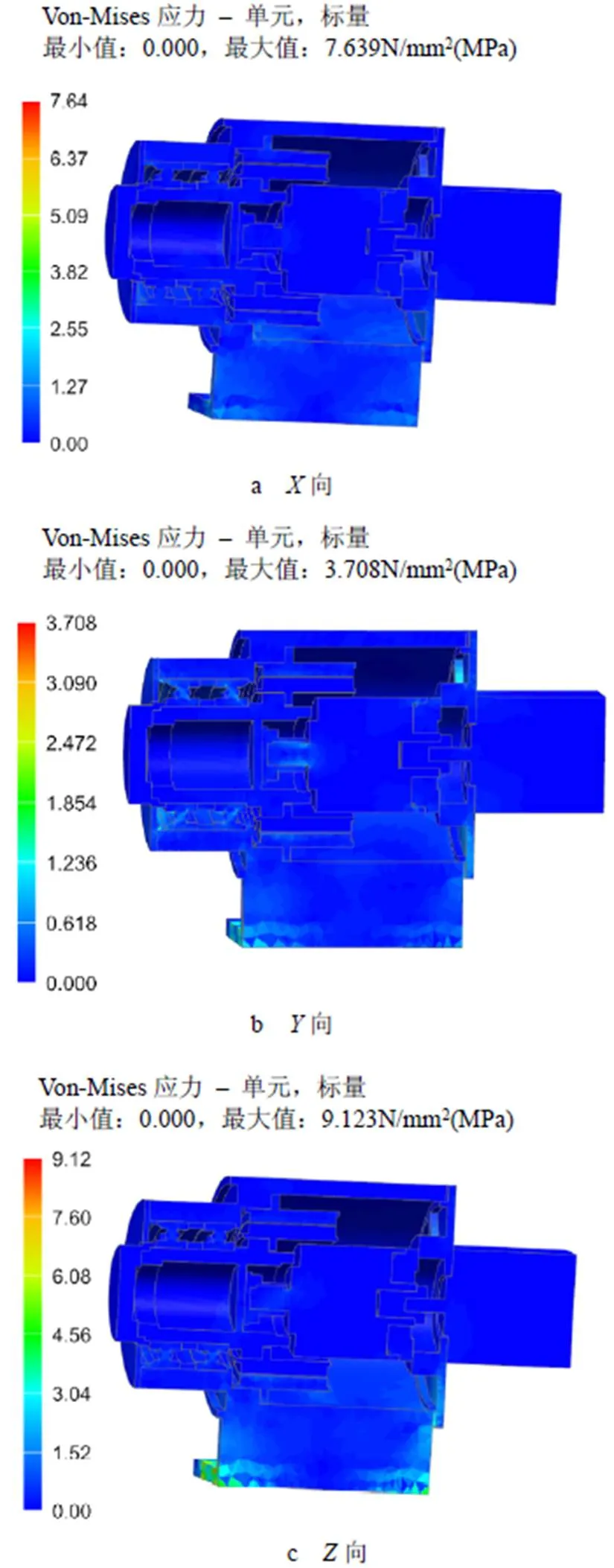
图6 最大应力云图
通过云图得,方向加速度响应最大,加速度均方根值为10.385g,加速度均方根值放大倍率为1.154,满足安全使用裕度,验证了与整机不存在共振放大效应。方向也为整机出现应力最大的方向,应力主要集中在主壳体上,最大应力为9.123MPa。然而,机壳材料为钛合金TC4,其屈服强度为825MPa,强度裕度充分,因此整机可以通过条件严苛的正弦振动实验。
5 结束语

1 于春旭,李睿,国锋. 一种微型空间驱动机构设计及力学仿真验证[J]. 空间控制技术与应用,2016,6(42):20~25
2 徐振宇. 卫星天线扫描控制系统的研究与实现[D]. 西安:西安电子科技大学,2012
3 杨亮,李朝辉,胡庆龙,等. 月基二维转台的轴系设计[J]. 仪器仪表学报,2015,36:20~24
4 王辉,郑士昆,朱佳龙,等.星载天线扫描机构轴系刚度计算与仿真分析[J]. 空间电子技术,2018(1):70~73
5 刘高峰,陈卫英,翁艺航,等. FY-3 卫星微波成像仪延寿技术分析和研[J]. 中国工程科学,2013,15(7):101~104
6 刘泽九. 滚动轴承应用手册[M]. 北京:机械工业出版社,2006
7 张书洋,张朴真,何永强,等. 卫星天线一体化轴系驱动机构研究[J]. 工程设计学报,2019,26(4):20~24
8 董嘉珩. 卫星天线扫描控制系统的研究与实现[D]. 西安:西安电子科技大学,2012
9 王槐,代霜,张景旭,等. 4m光学望远镜方位轴系集成支撑结构[J]. 仪器仪表学报,2013,34(12):2777~2784
10 Clark C S,Jacoby M S. Redesign and test of cryogenic mechanism for improved stiffness[C]. International Society for Opties and Photonics,2011:81500J-12
11 李朝辉,王忠素,胡庆龙,等. 月基极紫外相机跟踪转台设计与刚度分析[J]. 仪器仪表学报,2013,34(12):2535~2541
12 邓四二,贾群义. 滚动轴承设计原理[M]. 中国标准出版社,2014
13 刘泽九. 滚动轴承应用[M]. 北京:机械工业出版社,2007
Integrated Design and Mechanical Simulation of Satellite Antenna Scanning Driving Mechanism
Xiong Yifan Long Deng Liu Mingli Liu Rui Li Ningjie
(Shanghai Aerospace Electronic Technology Institute, Shanghai 201109)
The stiffness, accuracy and natural frequency of the satellite antenna scanning drive mechanism directly affect the reliability, accuracy and life of the load subsystem. The paper designs an integrated shafting drive mechanism which is assembled in series by stepping motor, planetary reducer and rotary transformer. Firstly, the shafting scheme of the driving mechanism is selected and analyzed. In addition, stiffness analysis, precision analysis are carried out for shafting design of driving mechanism, which provides theoretical basis for shafting design. Finally, the mechanical simulation of the whole driving mechanism is carried out to further verify the rationality of the structure design.
driving mechanism;shafting;stiffness analysis;accuracy analysis;mechanical simulation

V19
A
国家民用航天空间基础设施中长期发展规划项目(D010101)。
熊一帆(1993),硕士,机械工程专业;研究方向:卫星有效载荷驱动机构设计。
2021-11-02
