北斗定位导航系统与其他自动行驶算法的融合
2022-01-14张昕
张昕
(东北石油大学秦皇岛校区,河北秦皇岛 066000)
1 背景
北斗导航系统中,车辆在自动行驶时,主要通过对北斗卫星信号的接收,来进行自身位置的感知。然而,卫星信号在楼宇内部传输限制比较明显,很难在楼宇内部接收到卫星信号,获取卫星定位信息[3]。目前,室内定位技术的主要方法是以WIFI接入点等网络设备为基础的指纹方式,或者采用手机基站定位方式,并不成熟。存在技术复杂、造价高、精度差、性价比低等问题[4]。
在某些场合中,如自动物流送货车,老年代步电动轮椅等移动行驶车辆,需要在室外和室内自动行驶。在室内要实现自动行驶功能,单靠北斗系统很难做到。因此对于同时要在室内室外自动行驶的环境中,北斗卫星导航与其他车辆控制算法相结合短期内将成为主流的解决方案[5]。
2 北斗目前卫星定位技术
目前能够从北斗定位系统获得的参数主要有经度纬度和海拔高度。在车辆的移动过程中可以采用这三个参数进行自动行驶控制。北斗定位导航系统的常见解决方案主要用到三种硬件设备:北斗卫星基站、北斗接收器和北斗车载定位天线。其中北斗卫星基站主要通过卫星通信获取定位参数;北斗接收器和北斗车载定位天线一般安装在车辆上,通过无线通信获取北斗卫星基站的定位信息。一个北斗卫星基站的覆盖范围一般能达到5 公里。为了达到更高的精度,北斗定位导航算法一般采用RTK 算法。
3 循迹移动控制
目前,循迹移动车辆控制的方法比较成熟。一般采用光电传感器进行轨迹线的检测,将结果反馈到车辆控制器,控制移动车辆沿着轨迹线行驶。目前循迹控制算法在室外使用具有一定的局限性,首先,在不具备照明条件的路面上,夜晚循迹线无法识别,循迹移动的车辆无法工作。其次,在一些极端的天气中,比如下雪、冰雹等,循迹线会被遮盖,无法识别,甚至阴天下雨,阳光下的树影摇摆,也会影响循迹车辆的移动。此外,室外由于风化侵蚀等环境因素和人为因素,导致循迹线遭到破环,变得不连续,这些因素都将使循迹移动车辆的控制效率大打折扣。在本算法中,循迹控制主要应用于室内车辆的移动控制。
为了实现两种算法的切换采用儿童电动车搭建的硬件平台来验证,具体结构如(图1)。
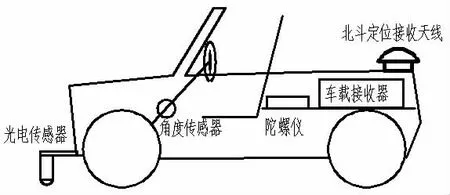
图1 算法验证小车平台
此儿童电瓶车驱动电池为12V,需要做如下改装:在车头处安装光电传感器,用来做循迹移动控制。方向盘处安装电机,控制小车转向,对车前轮的转向做改装并安装角度传感器反馈小车前轮的转向角度。在小车车身水平处安装陀螺仪,用来感知车身姿态包括俯角仰角。在车身内安装北斗车载接收器,通过北斗定位接收天线可以接收北斗基站传输的定位信息。在车尾处安装北斗定位接收天线,单个天线可以直接对小车进行定位,精度可以达到米级,如果想要更精确的定位精度,需要加装两个定位天线实现RTK 算法。两个天线最好距离0.5 米以上,考虑小车的实际情况,两个天线应以车身中线为对称轴分居左右且连线与车身中线垂直。两个天线通过铜缆与车载接收器连接。本实验平台将两个定位天线安装在车尾两侧,可以采用RTK 算法。此外在车内安装有电机驱动板和ARM开发板,可以通过程序实现对车辆的北斗定位与控制算法。硬件平台的结构框图如图2 所示。

图2 硬件平台结构框图
算法实现:将循迹移动的轨迹线从楼内延伸至楼外。在有卫星信号的场地中,确定排成直线的五个点,间距1.25 米,A 点半径为50cm,其他每个点半径为30cm。轨迹线如图3 所示。首先通过北斗导航到达A 点,当车辆移动至A 时,开始执行循迹控制算法,判断A 是否在轨迹线内,之后继续向B 点移动,同时启动循迹算法,对于车辆移动的轨迹进是否在轨迹线内进行判断。当移动到B 点C 点直至E 点时,确定有两点在车辆移动的轨迹线内时,将沿着轨迹线行驶,完成控制算法的切换。
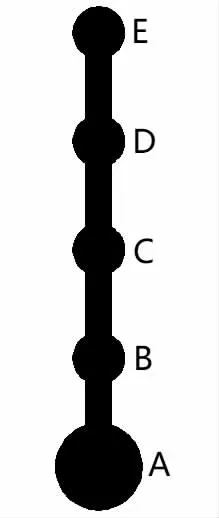
图3 控制算法切换部分的循迹线
在实际工作中,有时由于卫星定位系统的误差,导致小车无法找到正确的定位点,如导航到A 点所在的经纬度,但是由于误差,并没有在A 点的实际位置,无法发现轨迹线,所以A 点的半径设置为50cm,这样对于最低米级精度的北斗定位系统来说,精确度应该可以发现A 点,如果采用定位精度可以达到厘米级的RTK 算法,则很容易定位到A 点,之后按照卫星定位导航,依次行驶到B、C、D、E 点,并判断B、C、D、E 点是否在循迹线内,只要有两点满足在循迹线内,则小车按照两点连线的方向循迹移动,同时切换行驶控制算法,关闭卫星导航,切换到循迹线移动控制。经实验平台小车的实际场地测试,五个点能够保证大概率完成从卫星导航控制到循迹移动控制的过度。具体算法的流程图如图4 所示。
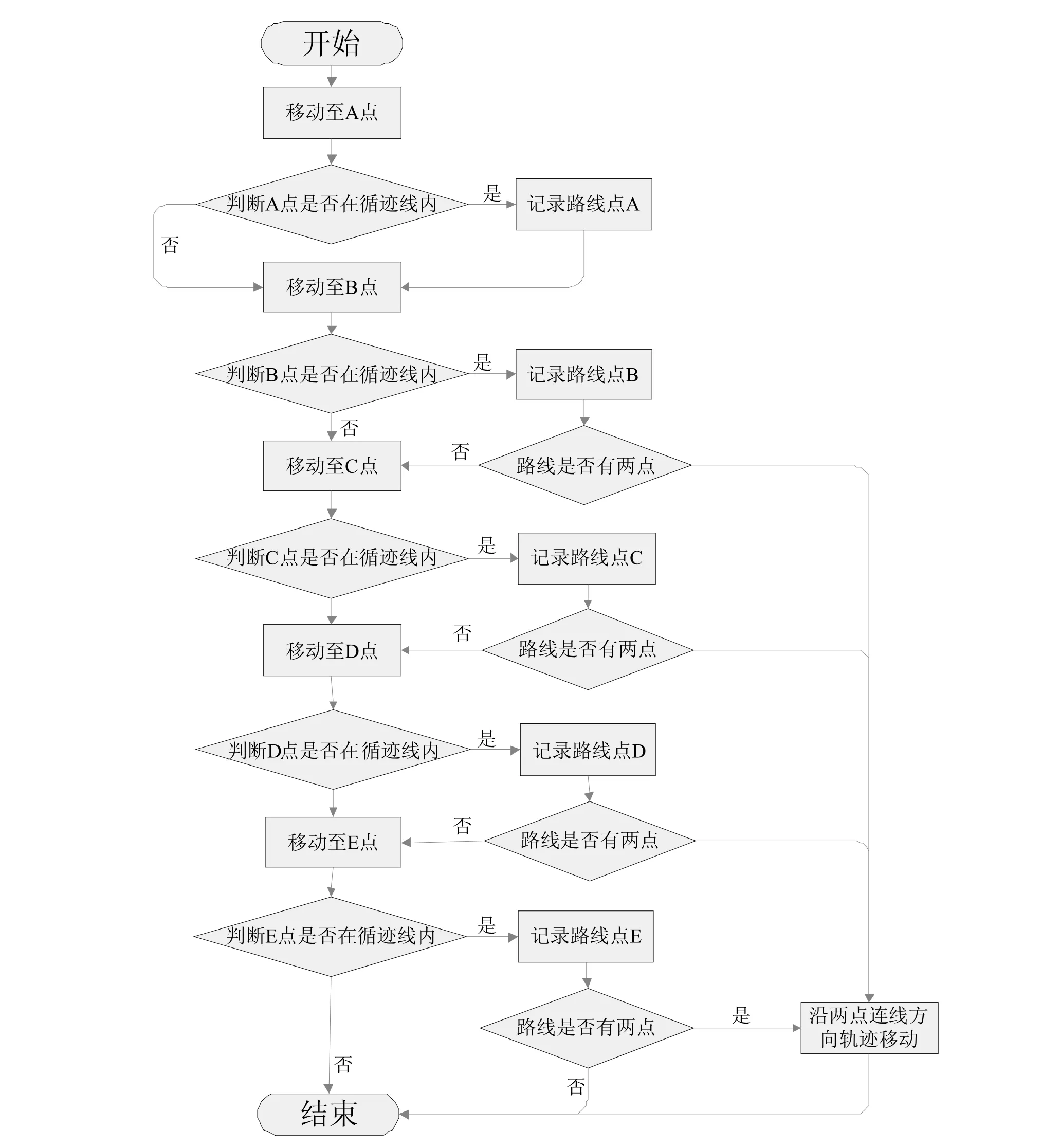
图4 算法流程图
算法测试适用范围:(1)实际的硬件处理速度和算法的复杂程度决定了此算法适合小车移动速度较慢的场合,如老年代步电动轮椅,楼宇内部的配送小车等。(2)楼宇内部的轨迹线需要规划好,不能出现交叉。(3)上下楼时,小车在楼宇内部的测斜坡式扶梯能够直接采用轨迹线循迹正常行驶。阶梯式扶梯和升降电梯场景需要人工辅助,才能使小车按照轨迹线继续移动。
4 展望
实验平台小车循迹部分采用的是光电传感器,如果改成摄像装置,上述的2 和3 可以通过图像标识的识别进行复杂一些的路线规划。此外,在ARM控制板上加装雷达探头可以实现在室内的简单避障,相关设计和实现已经在立项验证过程中。
