不同温度与驾驶工况下车用锂电池SOC估算
2022-01-13王文亮
杨 超,何 锋,王文亮
(贵州大学 机械工程学院,贵阳 550025)
锂电池作为电动汽车首要储能装置,对其进行科学的管理,不仅能延长它的使用寿命,还可防止过充、过放对电池内部结构造成永久性损伤。电池管理系统(BMS)[1-2]的重点研究方向之一是SOC的估算。对SOC估算的研究主要集中在2个方面,即:电池模型的构建、估算方法的探索。
等效电路模型[3]为最常见的电池模型,其中包含Rint、GNL以及Thevenin模型等。Rint模型是由一个电压源和一个内阻串联而成的简单模型,难以精确反映出电池内部的动态特性。颜湘武等[4]提出了一种高精度GNL模型,提高了估算SOC的精度,但由于该模型过于复杂,增大了计算难度。为了减小计算复杂度,REN等[5]和陈玉珊等[6]建立了1阶RC等效电路模型。该模型有效解决了计算复杂度问题,但模型精度有所降低。故,为了同时兼顾计算复杂度与模型精度,选择2阶RC等效电路模型。
在SOC估算方面,常见方法有安时积分法、模糊逻辑控制法、神经网络法以及KF算法。安时积分法[7]受到电池工作时过程噪声与仪器观测噪声的影响,误差会随着时间推移而累积,一般不单独使用。KIM等[8]利用模糊逻辑控制法实现了SOC的估算,但受存储空间大、模糊控制规则设计以及计算量大等影响,不适合于实际运用。于仲安等[9]和ZHANG等[10]提出了一种改进神经网络法实现SOC的估算,但受到样本丰富度和硬件的限制,工程实用性不强。随着KF算法的不断发展与改进,已在SOC估算上得到了实践。XIAO等[11]分别采用EKF和无迹卡尔曼滤波(UKF)实现SOC的估计,对比得出2种方法的估算能力基本一致。为了进一步提高算法的精度,LI等[12]提出了AUKF算法,利用自适应算法时刻更正UKF中的白噪声,提高了估算方法的自适应容错能力,更好地跟踪真实值。DONG等[13]在研究中发现,电池参数会受SOC值的影响,提出了一种RLS-AUKF联合算法同时对电池参数和SOC进行估算,并将估算误差控制在2%以内。ZHANG等[14]提出的EKF-UKF联合算法,具有较强的预测SOC和识别电池参数能力,但其稳定性未在不同温度下进行验证。
上述关于SOC的研究未考虑温度对电池的影响,宋凯等[15]和LUO等[16]研究发现,不同温度下OCV-SOC的函数关系不同,同时温度还会影响电池的实际放电容量。为了能在不同温度与驾驶工况下快速、精确地估算出SOC,给出了EKF-AUKF联合算法。通过建立电池模型,在 OCV-SOC-T函数映射关系下,利用EKF-AUKF联合算法同时对电池参数和SOC进行估算,并在不同温度与驾驶工况下进行了验证。
1 电池模型建立
电池模型是估算SOC的前提,SHEN等[17-18]研究表明,2阶RC等效电路模型可有效反映出电池的物理与化学变化,且计算成本低,符合BMS的要求,因此采用如图1所绘制的电路模型。
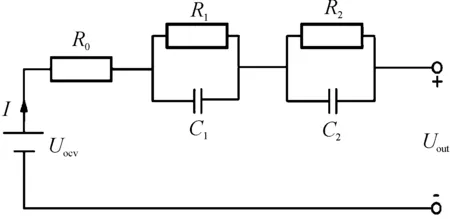
图1 2阶RC等效电路模型
电池等效电路模型可用式(1)表示。
(1)
式中:I为电流;R0为欧姆电阻;C1与C2为极化电容;R1与R2为极化电阻;Uout和Uocv为端电压和开路电压。
SOC表达式为:
(2)
式中:T为采样时间;η为库仑效率;Cn为电池容量。
2 实验设计
通过搭建实验测试平台,以实现电池的各种工况测试,该平台由恒温箱、电池测试设备以及计算机构成,如图2所示,其中恒温箱可提供-20~80 ℃的测试环境,电池测试设备具有横流充放电、搁置、循环以及模拟工步等工作模式。利用BTS7.6.0软件控制电池的充放电电流,以模拟电池在不同温度与驾驶工况下的工作状态,同时记录电池的电流与电压数据。本实验以三元锂电池为研究对象,详细参数见表1所示。

图2 实验测试平台
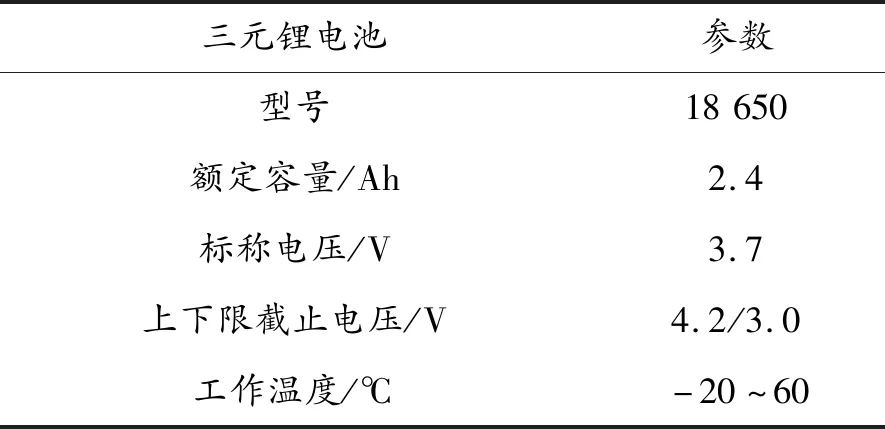
表1 单体电池参数
2.1 OCV-SOC-T函数关系的标定
电池充满电后,分别在0、25和45 ℃环境条件下采用0.5 C放电倍率进行脉冲放电测试,并利用实验设备采集的数据绘制OCV-SOC-T函数关系,如图3所示。从图3可看出,不同温度下的OCV-SOC函数关系存在差异,则表明电池特性会受温度的干扰,进而影响SOC的估算。
图3 OCV-SOC-T函数关系
2.2 可用电池容量测试
电池充满电后,分别在0、25和45 ℃环境条件下,采用0.5 C放电倍率进行电池放电容量测试,每组工况测试3次并求取均值,结果如图4所示。从图4中得出,温度对电池实际可用容量的影响十分显著,与额定容量相比,0 ℃条件下的可用电池容量减小了17.08%。
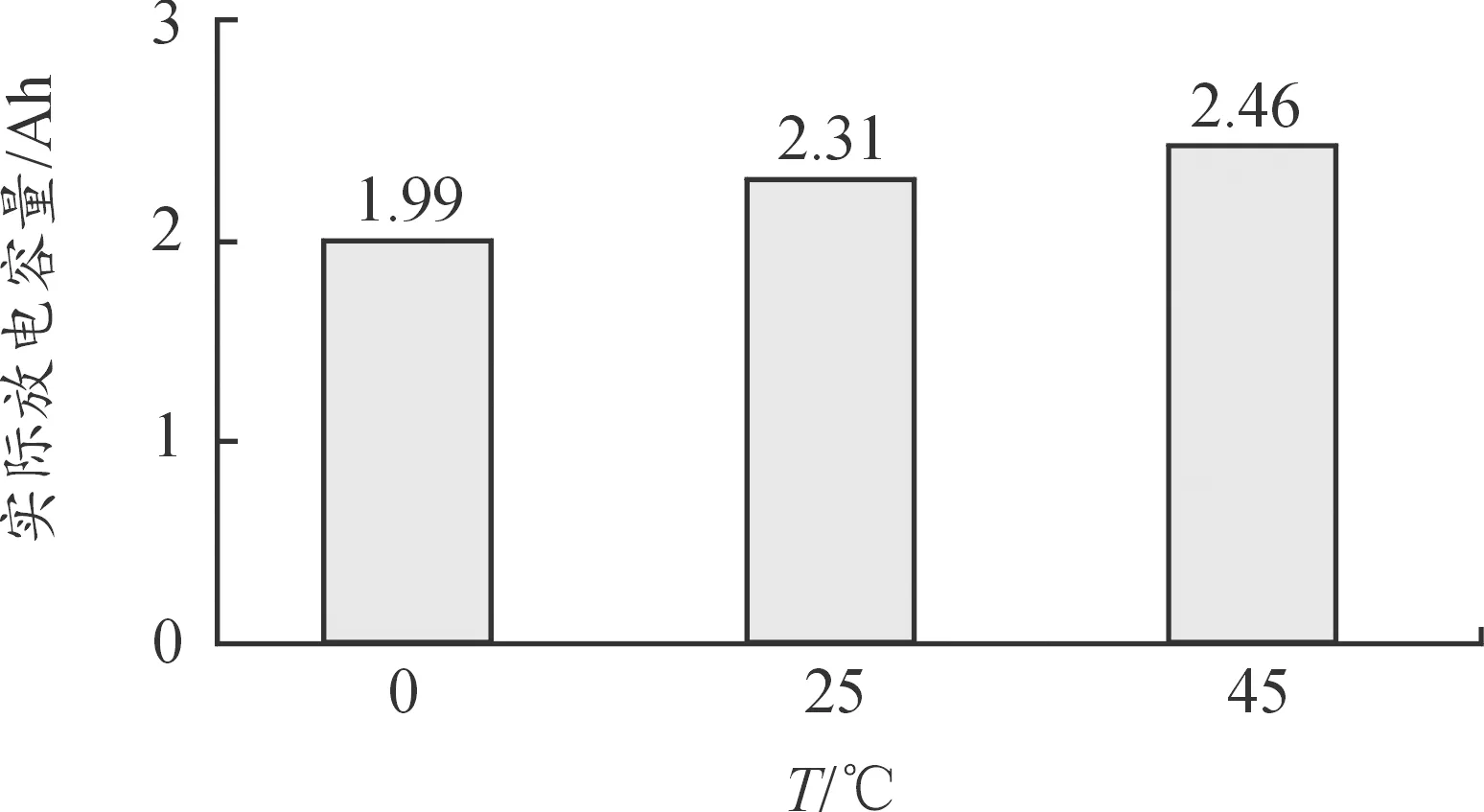
图4 不同温度下可用电池容量
2.3 BJDST和FUDS工况测试
电池充满电后,在不同温度条件下分别采用北京动态压力测试工况(BJDST)和美国联邦城市运行工况(FUDS)进行实验,直至电池到达截止电压时终止实验。两工况循环测试周期分别为900 s与1 372 s,电流曲线如图5所示。
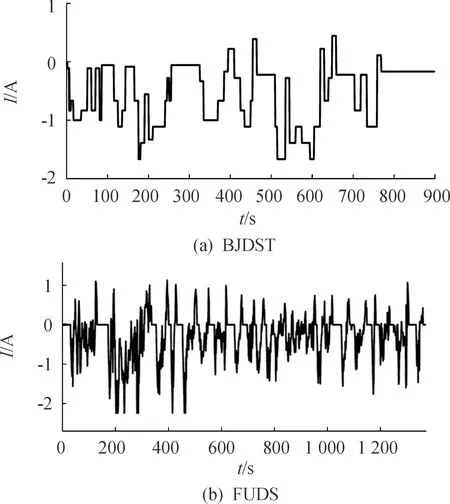
图5 BJDST和FUDS工况电流曲线
3 EKF-AUKF联合算法
传统单一AUKF算法在估算SOC时将电池参数视为理想化常数,忽略了温度、SOC以及驾驶工况对电池参数的影响,导致估算能力下降。为了克服电池参数的时变特性,采用EKF-AUKF联合算法对时变参数和SOC进行并行估算,即EKF用于电池参数识别,AUKF用于SOC估计。
将式(1)离散化,并联立式(2),可推导出含电池参数和SOC的离散状态空间方程:

(3)
Uout,k=Uocv(SOCk)-U1,k-
U2,k-IkR0+vk
(4)
式中:

根据式(3)(4)得到具有电池状态和电池参数的非线性系统:

(5)
式中:uk为控制变量,uk=Ik。
EKF-AUKF联合算法的运行过程如下,流程图如图6所示。
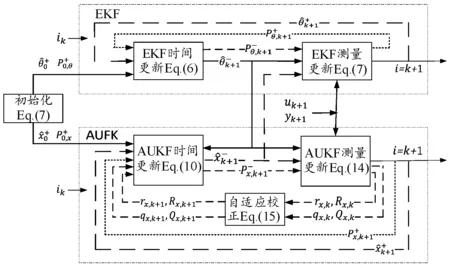
图6 EKF-AUKF联合算法流程框图
2)EKF中电池参数的时间更新:
(6)
3)EKF中电池参数的测量更新:
(7)
(8)
利用EKF算法完成当前时刻电池参数θ=[R0,R1,C1,R2,C2]T更新后,将电池参数作为已知输入量传递给AUKF算法实现SOC的估算,具体公式如下:
4)AUKF的Sigma采样点计算:
(9)
5)AUKF中电池状态和协方差时间更新:
(10)
6)AUKF的观测预测:
(11)
7)计算AUKF的观测预测均值和协方差:
(12)
8)计算AUKF的增益矩阵:
Kk+1=Px,k(Py,k)-1
(13)
9)AUKF中电池状态和协方差测量更新:
(14)
10)Sage-Husa自适应算法为:
(15)

引入自适应算法可时刻更新AUKF中的固定噪声参数,提高了估算SOC时的自适应容错能力。
4 实验验证与分析
4.1 模型精度验证
为了验证2阶RC等效电路模型的可靠性,在BJDST工况下进行测试,电池的初始SOC为90%,放电结束时SOC为20%,25 ℃环境下测试的模型电压与真实电压对比结果如图7所示。
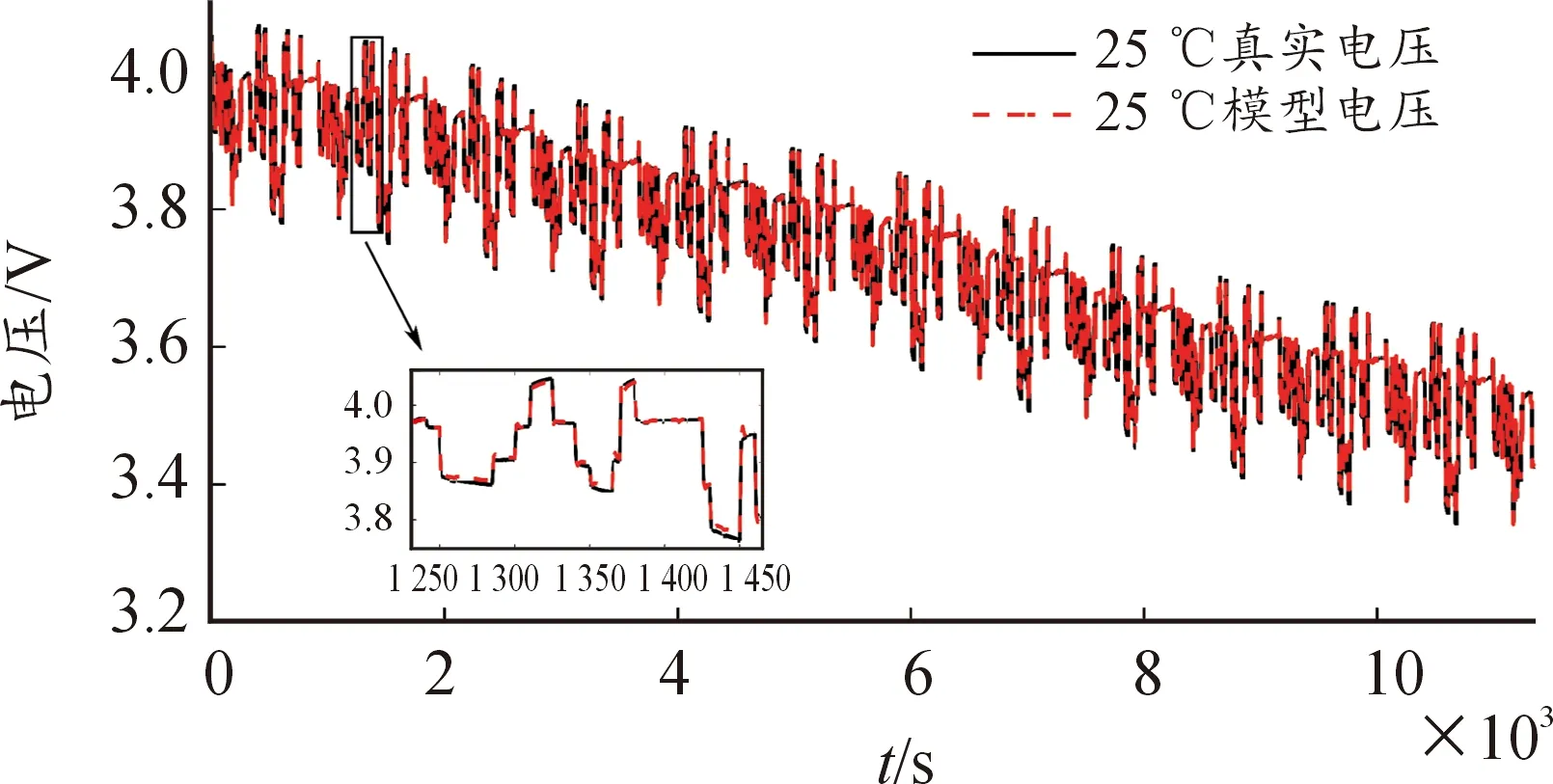
图7 BJDST工况模型电压与真实电压
同理,在0、25、45 ℃环境下进行了测试,3种环境温度下测试的电压误差如图8所示,平均相对误差(MRE)如表2所示。通过图8、表2可看出,0 ℃时电压误差略大于25、45 ℃,但最大误差在1.00%以内,MRE控制在5.50 mV以内,满足了模型精度要求。
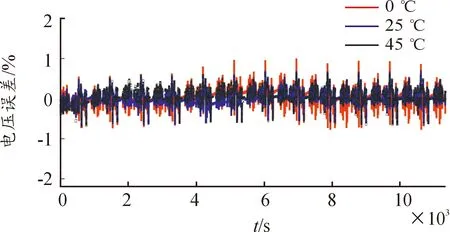
图8 不同温度下模型电压与真实电压的误差
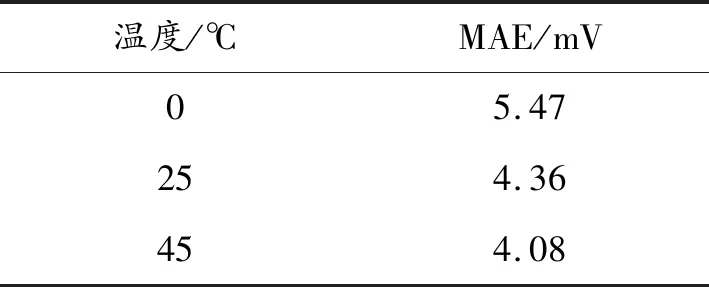
表2 电压的平均相对误差(MRE)
4.2 SOC估算验证
为了验证EKF-AUKF联合算法的估算能力,在不同温度与驾驶工况下进行了测试,其中驾驶工况的真实SOC初始值为90%,仿真测试SOC初始值为80%。
1)BJDST工况
BJDST的仿真结果如图9、表3所示。图9中的(a)(c)(e)分别描述了0、25、45 ℃时AUKF估算的SOC、EKF-AUKF估算的SOC以及真实SOC的对比;图9中的(b)(d)(f)分别绘制了不同温度下离线辨识与在线辨识的对比,其中为电池参数中的欧姆内阻。
从图9和表3可看出,在SOC估算方面,0 ℃条件下AUKF和EKF-AUKF的均方根误差(RMSE)分别为1.74%和1.10%;25 ℃条件下AUKF和EKF-AUKF的RMSE分别为1.57%和0.92%;45 ℃条件下AUKF和EKF-AUKF的RMSE分别为1.61%和0.85%。从图9中的(b)(d)(f)对比分析可得,EKF-AUKF估算的会受SOC和环境温度的影响,开始阶段由于电池放电过程产生热量,呈下降趋势,但随着SOC不断减小而增大,故在线辨识比离线辨识更能反映电池动态特性。
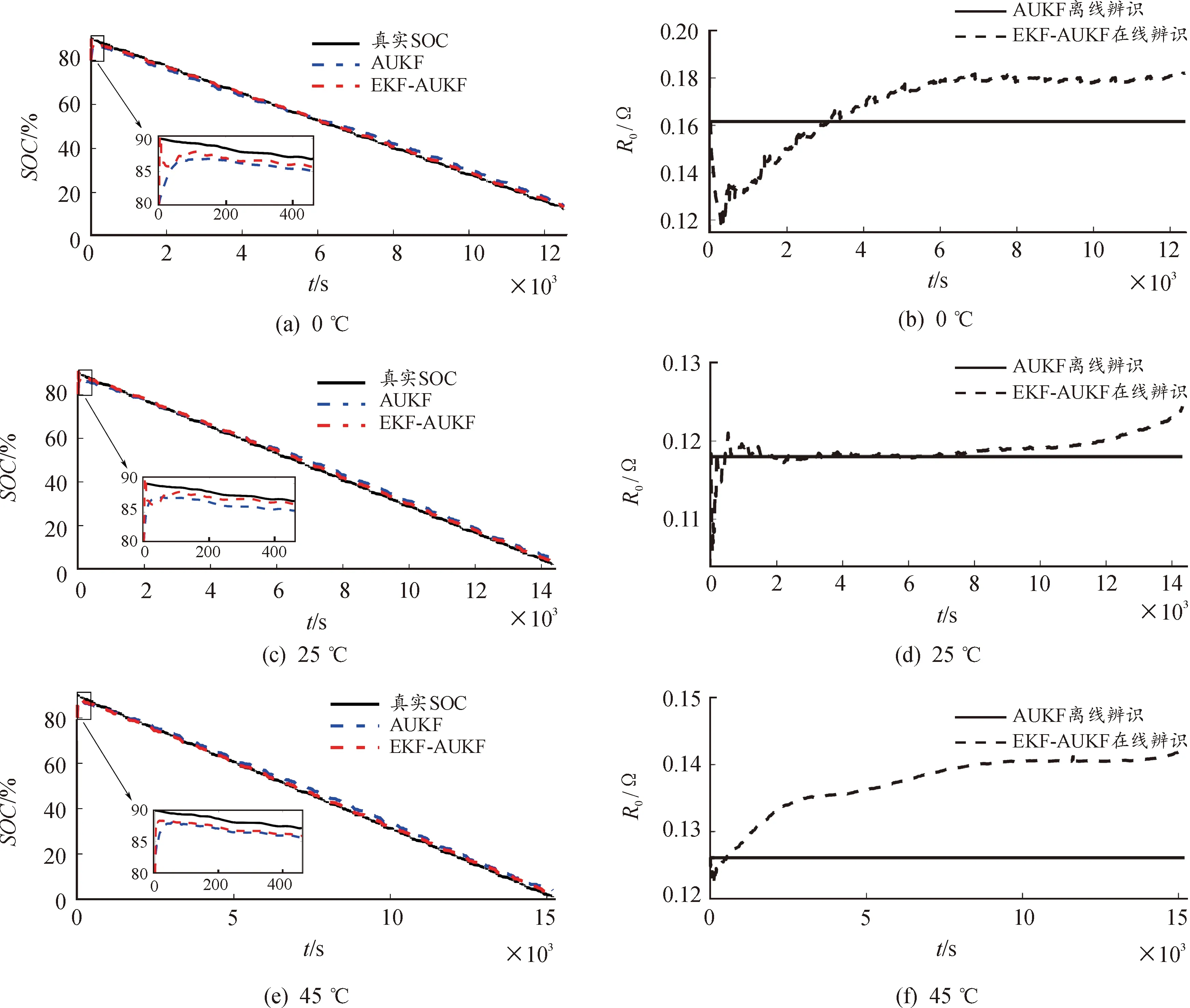
图9 BJDST下SOC和仿真结果
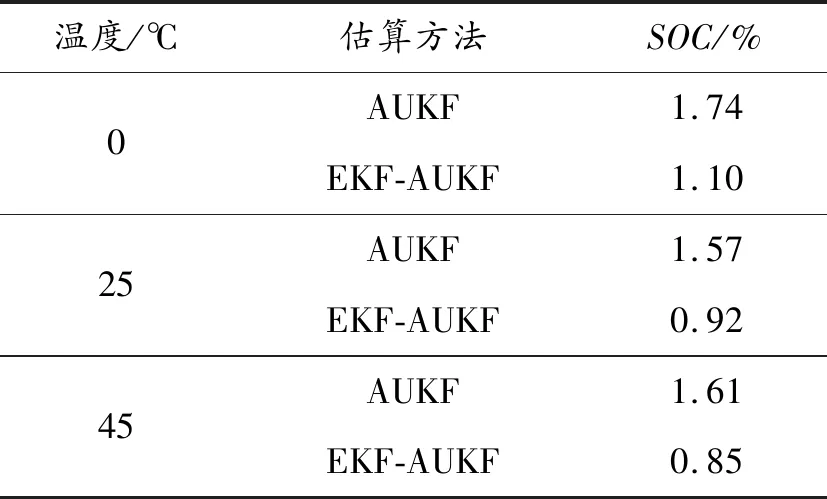
表3 BJDST下RMSE仿真结果
结果表明:EKF-AUKF联合算法具有电池参数识别能力,在不同温度下估算SOC的精度、收敛性以及鲁棒性均优于AUKF。此外,从图9、表3可看出,0 ℃时较大,且SOC的估算精度略低于25 ℃和45 ℃环境下,但EKF-AUKF联合算法均可将RMSE控制在1.10%以内,具有较强的抗干扰能力。
2)FUDS工况
FUDS的测试结果如图10、表4所示。图10中的(a)(c)(e)分别描述了0、25、45 ℃时AUKF估算的SOC、EKF-AUKF估算的SOC以及真实SOC的对比;图10中的(b)(d)(f)分别绘制了不同温度下离线辨识与在线辨识的对比。
从图10、表4可看出,在SOC估算方面,0 ℃条件下AUKF和EKF-AUKF的RMSE分别为1.83%和1.06%;25 ℃条件下AUKF和EKF-AUKF的RMSE分别为1.70%和0.99%;45 ℃条件下AUKF和EKF-AUKF的RMSE分别为1.65%和0.94%。从图10中的(b)(d)(f)可看出,不同温度条件下EKF-AUKF估算的会随着工作时间的变化而变化,且低温对电池特性影响更为严重,值偏大。
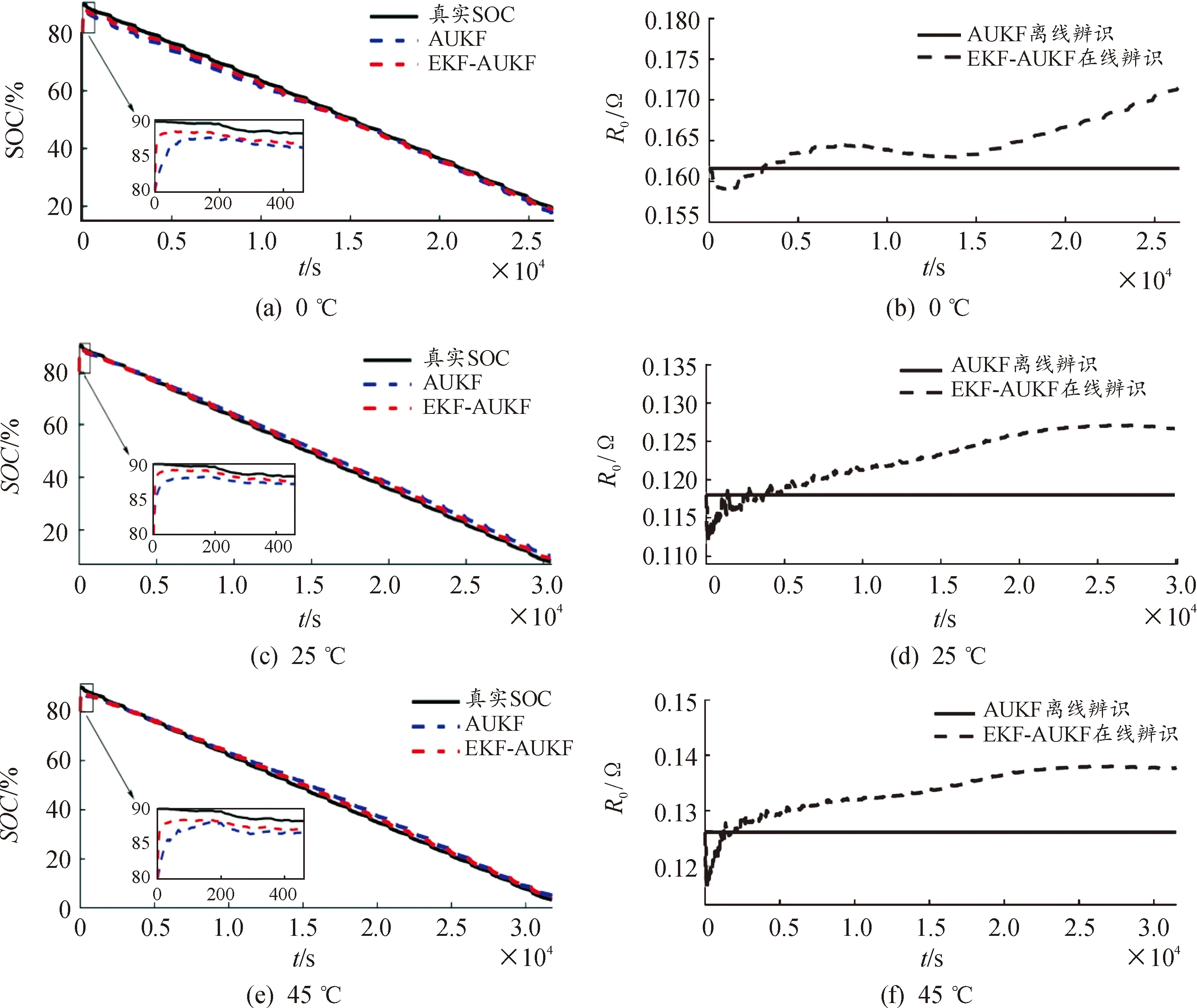
图10 FUDS下SOC和测试结果
结果表明:EKF-AUKF联合算法具有识别电池参数的能力,在不同温度下SOC的估算精度优于AUKF,且收敛性、鲁棒性更强。此外,从图10、表4可看出,0 ℃时较大,且EKF-AUKF联合算法的估算性能略低于25 ℃和45 ℃环境下,但该算法均可将RMSE控制在1.10%以内,具有较强的自校正能力。
综上所述,本文建立的EKF-AUKF联合算法具有较强的估算能力,可在不同温度与驾驶工况下快速、精确地估算出SOC,并识别出电池参数。通过图9、图10、表3及表4对比分析得出,在相同驾驶工况、不同温度条件下,0 ℃时的估算精度略低于25 ℃和45 ℃,且电池放电时长缩短,这是由于低温对电池特性影响较为敏感,导致本文所建立的电池模型精度略微不够,进而影响了估算结果;在相同温度、不同驾驶工况条件下,EKF-AUKF联合算法在BJDST工况下的预测优于FUDS,这主要是因为FUDS工况的负载电流比BJDST工况更为复杂。综上所述,温度与驾驶工况的改变会对SOC的估算造成一定的影响,但EKF-AUKF联合算法可通过自校正来削弱外界的干扰,将RMSE控制在1.10%以内,具有较强的估算精度、收敛性以及鲁棒性。
5 结论
以2阶RC等效电路模型为基础,在 OCV-SOC-T函数映射关系下,EKF-AUKF联合算法利用EKF实时预测电池参数,同时联立AUKF对SOC进行估算,并在不同温度、驾驶工况条件下与单一的AUKF算法进行对比,实验结果表明:
1)EKF-AUKF联合算法能够实现电池参数的在线辨识,为SOC的精确估算提供可靠的实时电池参数数据。
2)当初始SOC值存在偏差时,EKF-AUKF联合算法可快速收敛到真实SOC值附近,具有较强的收敛性和鲁棒性。
3)与单一的AUKF算法相比,EKF-AUKF联合算法可有效降低温度与驾驶工况等环境因素的改变而引起的SOC估算误差,将REMS控制在1.10%以内。该算法同时兼顾了鲁棒性强、收敛性好以及估算精度高等特点。
