一种基于子阵重构的三元线阵左右舷分辨方法
2022-01-11沈正一汪晴
沈正一 汪晴
(第七一五研究所,杭州,310023)
拖曳线列阵声呐是水面舰艇、潜艇的主要装备之一,目标信号左右模糊是传统拖曳线列阵的主要难题[1]。引入三元水听器组设计线列阵后,可以在线列阵中线左右两侧位置获得目标信号的采样,进而利用左右两侧微小孔径获得的信号差异,使用特殊的波束形成方法,抑制目标镜像方向的目标能量,获得实时、无左右舷模糊的水平全波束能量输出。
STMV方法是适用于宽带信号,基于最小方差无失真原则的自适应波束形成方法。该方法使目标真实方向信号无失真通过,镜像方向目标信号响应归为干扰被自适应抑制。此方法可用于三元组线阵,将三元组三线阵波束形成与三子阵 STMV波束形成结合,从而在最终的多波束输出中获得无镜像模糊的目标信号输出。但在实际使用中发现,当外部因素造成三元拖曳线阵发生大幅度的首尾不同扭转时,按照三元组中三水听器安装通道号划分子阵进行 STMV处理的多波束输出的左右舷分辨能力会大幅下降甚至出现分辨错误。本文提出一种按照三元组上各水听器滚转后的实际位置重构子阵,再进行STMV处理。湖试结果证明,采用此方法后,当实际三元拖曳线阵发生大幅度首尾不同扭转时,线阵的左右舷分辨结果正确且左右舷抑制能力优于传统方法。
1 子阵重构左右舷分辨方法
1.1 STMV方法介绍
针对宽带信号的场景,Krolik和 Swingler在Capon 的最小方差无畸变波束形成方法(Minimum Variance Distortion Less Response,MVDR)基础上,提出了导向最小方差波束形成STMV[2]。STMV是基于导向协方差矩阵(Steered Covariance Matrix,STCM)对不同频点的互谱密度矩阵进行相干积累,计算宽带空间谱。STMV利用声场的空-时统计特性,在一定带宽下仅需少量快拍数就能实现快速收敛,可以在获得宽带增益的同时减少收敛所需时间[3-4]。
1.2 三元线阵坐标系的STMV左右舷分辨方法
首先建立三元线阵在三维直角坐标系中的位置模型[5],见图1。该线阵水平方向由N个三元组部件组成,每个部件有三个无指向性水听器。三个水听器均匀分布在一个半径为r的圆周上,其两两连线形成一个等边三角形。三元组中心水平间距为d,横滚为βn。

图1 三维直角坐标系中三元线阵示意图
1.3 STMV左右舷分辨方法的抗线阵扭转改进
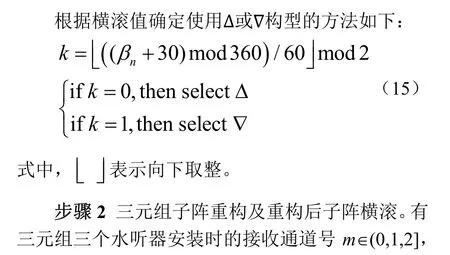
由于线阵背景噪声有很强的相关性,且不同侧噪声相关性不同。因此在三元拖曳线阵发生大幅度的首尾不同扭转时,各三元组相同安装序号的水听器可能会出现在线阵左右两侧。此时背景噪声的改变会降低STMV方法的左右舷分辨能力,甚至造成左右舷分辨错误。本文的解决方法是,按照各三元组横滚后的水听器实际左右位置确定其归属子阵,进行子阵重排,使得三线子阵中构成子阵的水听器在线阵左右的同侧。具体处理步骤如下。
步骤1子阵重排目标的确立。两种通道重排后的子阵划分方案见图2。合理的选择重排目标,可使重排后划分出的子线阵横滚最小,在[-30°,30°]之间。

图2 两种子阵划分方法
2 实际数据处理
为验证本文介绍的扭转线阵左右舷分辨方法的正确性和实际效果,对某次湖试数据进行处理和分析。下文提到的左右舷抑制比是用来比较不同方法的左右舷分辨能力[6],抑制比越大,左右舷分辨能力越强。
湖试使用的线阵由60个0.6 m等间距均匀分布的三元组水听器构成,其中每个三元组上三个水听器两两间距为0.06 m。三元组水听器编号从0开始,横滚传感器安装在4、9、12、20、28、36、41、44、53、58号三元组水听器位置。声源发射的目标信号为1 s脉宽、1000~1500 Hz带宽的宽带脉冲信号。信号从水平方向相对阵首的右舷81°方向入射。湖试中,将三元组线阵的首端固定后,在阵尾端施加人为扭转。通过线阵上安装的横滚传感器可知,阵尾端相比首端共扭转约2圈。考虑到线阵柔性和受力均匀,因此假设横滚值随距离线性变化。用一次最小二乘拟合法,计算得到所有三元组水听器的横滚值。横滚实测和三元组位置的横滚拟合值见图3所示。

图3 横滚实测值和各三元组处横滚拟合值
数据处理中使用1.2节介绍的STMV方法进行左右舷分辨的波束形成。在STMV的具体实现中,按照子阵划分和使用横滚值的不同,分为三种不同实现方法:
方法 1,按本文 1.2节中方法进行全方位波束形成。其中按照三元组中水听器安装序号划分三条子阵,各三元组的横滚值取为所有横滚传感器测量值的均值;
方法 2,按本文 1.2节中方法进行全方位波束形成,其中按照三元组中安装序号划分三条子阵,各三元组的横滚值取由横滚传感器拟合得到的值(图3);
方法3,按本文1.3节中方法进行全方位波束形成,其中,三元组的横滚值取由横滚传感器拟合得到的值(图3),再以此进行子阵重构和横滚值修正。
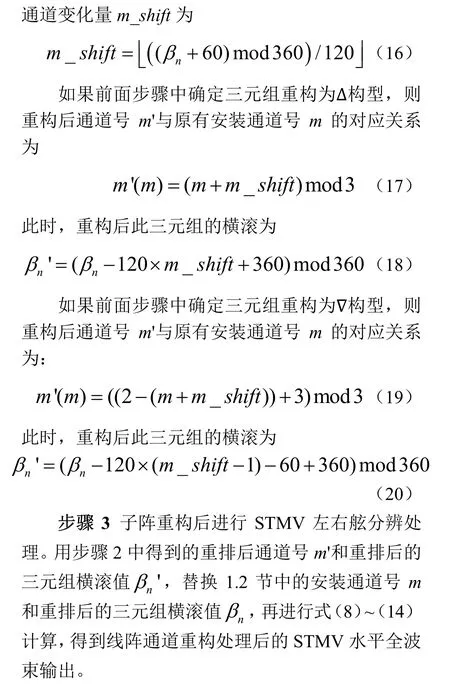
三种方法的全方位波束输出功率幅度和目标/镜像方向的左右舷抑制比结果见图4与表1。从图表中可见,本文方法在目标方位估计正确的前提下,有最佳的左右舷抑制比。

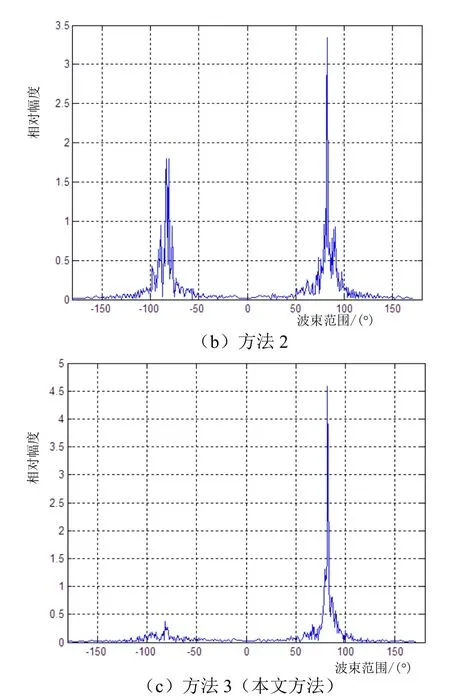
图4 三种数据处理方法的全方位波束输出能量

表1 三种方法的输出左右舷抑制比
3 结论
本文介绍了一种可用于扭转后的三元线列阵的目标左右舷分辨方法。方法按照横滚后各个三元组中每个水听器实际的空间位置进行三子阵分割,再在重新分割后的三子阵数据上进行各子阵的波束形成和三子阵的STMV处理。此处理方法可以在线阵首尾发生不同扭转时,提供正确的左右舷处理结果和比其它方法更好的左右舷抑制比,为扭转的三元线阵提供有效的目标左右舷分辨能力。
