一种基于PLC的堆垛机
2022-01-11宋佳妮
宋佳妮
吉林电子信息职业技术学院 吉林 132024
0 引言
随着自动化立体仓库技术越来越成熟,自动化立体仓库已广泛应用于烟草、食品、制药、邮政、印刷、电子等领域,并已在航空航天,金融和军事领域得到了新的发展[1]。1960年前后,美国成功研发出堆垛机,最初的堆垛机沿着地面导轨行走,并利用地面导轨水平移动以防止倾斜[2]。现代化立体仓库的出现,使堆垛机成为支持立体仓库发展的特殊起重机。堆垛机的主要工作方式是在高架通道中来回往复运动,将需要存储的物品存储在货仓隔间中,或是从货仓隔间中取出货物并将其运输到目的地。随着计算机控制技术和科学技术的进步,堆垛机的高度也在增加,到目前为止,堆垛机的高度可达40 m以上[3]。
传统的堆放货物方式采用人力和简单的机械设备,不仅易使货物存放不合理,降低空间利用率,还可能会造成工作人员的伤亡。在现代自动化立体仓库系统中,多为机器运作,工作人员较少且多为机器的操作人员和日常维护人员,参与运输堆垛的劳动人员很少。现代自动化立体仓库系统与传统的堆垛方式对比,不仅节省了劳动力,而且充分保证了人员的生命安全,改善了工作人员的工作环境。现代自动化立体仓库机器运作时间长、效率高、事故少,可提高整个生产的劳动生产率,提升了经济效益[4]。另外,堆垛机还大大降低了各存储单元的能耗,符合现代工业发展趋势,符合绿色节能理念。
因此,基于PLC的堆垛机的出现,能在提高工作效率的同时改善工作人员的劳动环境,减少工作人员不必要的伤亡。随着技术的发展,未来更智能的堆垛机完全取代传统堆垛方式将是必然趋势。
1 堆垛机总体设计
堆垛机总体主要由x方向行走机构、y方向提升机构、z方向货叉伸缩机构、控制系统等部分组成,各机械机构之间通过螺栓连接。在堆垛机工作过程中,堆垛机首先通过行走机构按照路线移动至目标地点,通过提升机构带动载货台移动到目标物体高度,最后由货叉伸缩机构完成对货物的存取。提升机构下降一定高度,堆垛机再次通过行走机构移动到下一个目标位置,并通过提升机构调整方位,货叉伸缩机构带动货物到目标位置,松开货物,完成目标的移动[5-7]。
1.1 行走机构
行走机构的形式可分为滚珠蜗杆传动和齿轮齿条传动。滚珠丝杆传动是丝杆与螺母间以滚球为滚动体的螺旋转动副,其优缺点有:1)传输效率高;2)移动稳定,启动时无振动,低速时无爬行现象;3)高精度和高耐久性;4)同步性好,可靠性高;5)水平传动长度较小,不适用于传动长度较长的场合,易发生断裂。
齿轮齿条传动是将齿轮的回转运动转变为齿条的往复直线运动,其优缺点有:1)承载能力大;2)使用寿命长,工作平稳,可靠性高;3)能保证恒定的转动比;4)传动噪声大,磨损大。
在设计过程中,水平移动距离较小,考虑传动精度等,选定为滚珠丝杆传动。
1.2 提升机构
提升机构可选择链传动或滚珠丝杆传动。链传动是通过链条带动主动链轮的运动和动力传递的一种传动方式。其优缺点主要有:1)工作可靠,效率高;2)无弹性滑动和打滑;3)所需张力小,作用在轴上的压力小;4)可在复杂情况小工作;5)成本高,易磨损,传动平稳性差。传动会产生冲击,噪声较大。
在设计过程中,通过权衡对比,水平移动距离较小,考虑传动平稳、噪声等,选定为滚珠丝杆传动.
1.3 货叉伸缩机构
货叉伸缩机构可选择齿轮传动或滚珠丝杆传动。齿轮传动是由齿轮副传递运动和动力的装置。其优缺点主要有:1)传输精度高;2)可实行平行轴、相交轴等空间任意2轴间的传动;3)工作稳定,使用寿命长;4)制造和安装要求较高,成本较大;5)不适用于2个远程轴之间传动;6)对于环境条件要求较严,一般需要安装防尘罩,还需重视润滑。
考虑经济成本、定位精度等问题,选定为滚珠丝杆传动。
1.4 电控部分与安全保护
堆垛机的控制系统采用西门子s7-200的PLC进行对自动控制、手动控制、物料位置判断、存取货物等程序的设计,能够控制完成堆垛机操作需求,满足堆垛机存取货物。
1)联锁保护 堆垛机在x方向行走、y方向升降时,货叉处于短路状态,不能进行存取货物。相反,货叉在z方向伸缩时,堆垛机不能进行行走与升降指令。
2)正位虚实检测控制 堆垛机到达自动化立体仓库的货格时,在存取货物前需先探知自动化立体仓库的货格有无货物,若有货物则将信息传输给计算机,计算机给予指令,以防止双重入库,造成事故。图1为堆垛机总体装配图。
2 关键部件的选择与校核
堆垛机的机架结构可分为双立柱和单立柱2种。双立柱结构的机架由支撑立柱、私服支撑立柱、上顶板和下底板组成一个长方形的框架结构,这种结构可承受较强的冲击,从而堆垛机能够稳定的运行。单立柱结构的机架只有一根支撑立柱和下底板,这种结构可减少堆垛机总体质量,使用钢材较少,对比双立柱,降低了经济成本。但是,当堆垛机运行速度较快或承载货物较重时,刚性较差,可能会发生安全事故。并且,在堆垛机启动和停止时,堆垛机会产生相应的水平振动。
综合以上情况,双立柱结构的机架可保证足够的稳定性。考虑堆垛机的稳定性,故本设计选择结构为双立柱。
2.1 立柱设计与计算
堆垛机的主要受力部件为立柱,载货台在立柱上进行上下运动。由上顶板和下底板对立柱进行固定连接,堆垛机右侧立柱上安装有滚珠丝杆,电动机带动滚珠丝杆进而带动载货台作升降运动。由于立柱体积较大,在满足力学性能要求的前提下应尽量降低质量,按GB/T 6728—2002《结构用冷弯空心型钢尺寸、外形、质量及允许偏差》[8]规定,结构用冷弯矩形空心方通型钢,查文献[9]得出初选尺寸为50 mm×50 mm,壁厚为3.0 mm,截面积为5.408 cm2;按GB/T 700-2006《碳素结构钢》[10]规定,选择Q235碳素结构钢,该材料钢强度适中,承载性较好,具有较好的塑性和韧性,其强度极限为σb=375 MPa,屈服极限为σs=215 MPa,立柱高1 492 mm。立柱如图2所示。
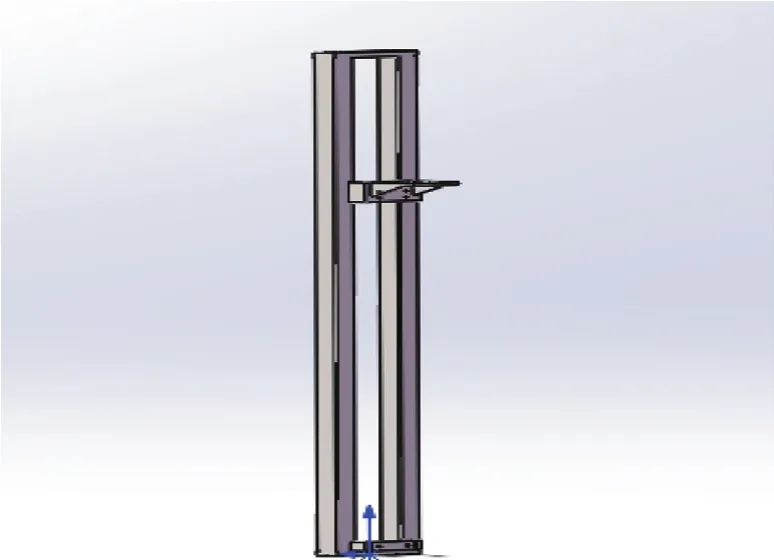
图2 立柱三维图
由于立柱与载货台相对静止,所以可将立柱与载货台看作一个整体,货叉完全伸出后,货物对货叉所受的载荷最大,货物对货叉有均布载荷,受力分析如图3所示。
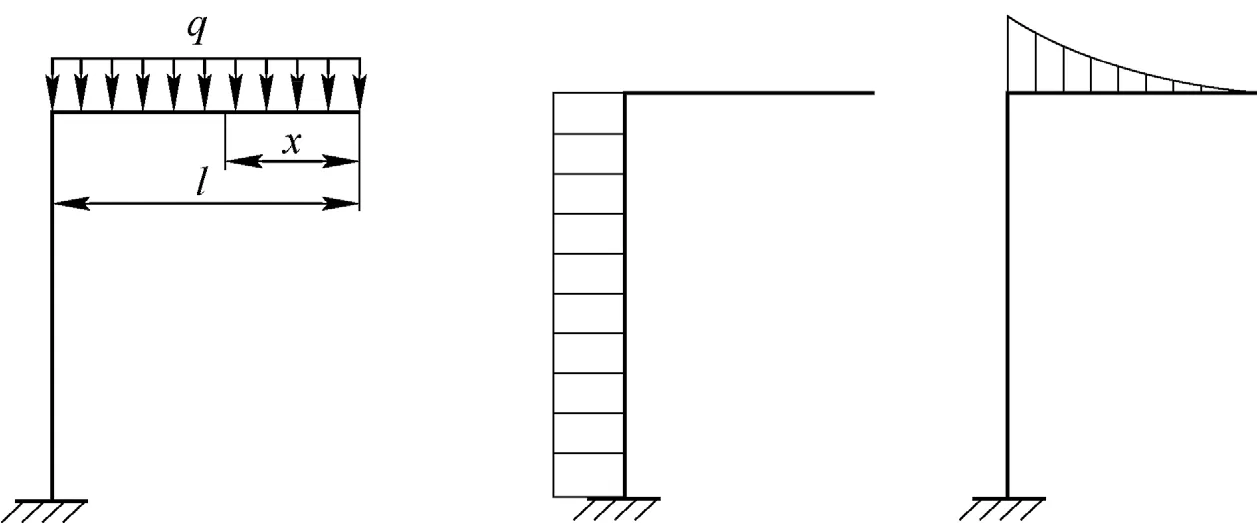
图3 立柱受力图
由图3可得
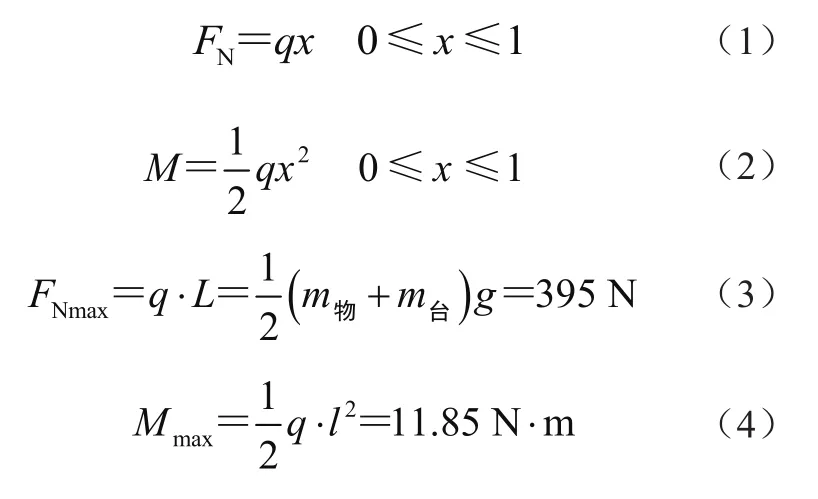
式中:L为立柱带载货台边缘的距离,L=6 cm。
由轴力FN产生压应力为

在弯矩作用下,以立柱轴线为中性轴,则最大拉应力等于最大压应力,该轴惯性矩I=25.374 cm4,则有

由GB/T 700-2006《碳素结构钢》规定可知,S1=1.2,S2=1,S3=σb/σs=1.744,则S=S1S2S3=2.09,可得

实际应力远远小于许用应力,在设计堆垛机的三维模型中,4根导向轴均可承受力。在安装立柱过程中,采用两端焊接板料以增加接触面积,增加稳定性,以使立柱能保持平衡。
2.2 提升机构设计与计算
提升机构负责运动到目标位置。提升机构主要由电动机、导向立柱、滚珠丝杆等组成。导向立柱与载货台相连接,丝杆螺母与载货台连接。提升机构的工作原理是:采用滚珠丝杆传动,当电动机带动滚珠丝杆旋转,电动机上安装有同步轮,通过同步带的连接,带动滚珠丝杆上的同步轮进行传动,丝杆螺母再带动载货台上下运动;将旋转运动转换为直线运动,进而载货台能够进行升降运动。
采用同步轮和同步带将电动机与丝杆之间进行连接。电动机和滚珠丝杆上安装有同步轮,两者之间由同步带连接。同步带对比V带、平带具有传动准确,运行时无打滑,传动比恒定,传动平稳,具有缓冲和减震能力、噪声低、传动效率高等特点。同步轮如图4所示。
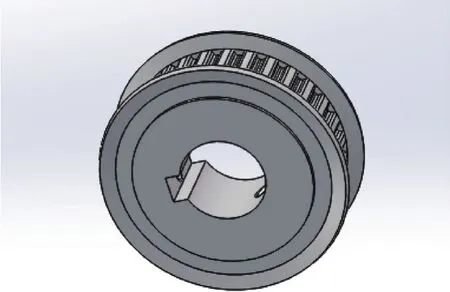
图4 同步轮示意图
提升机构所需功率为

查询同步轮驱动功率表得知,选择XL系列,根据安装尺寸选择大小为30齿。
载货台上装有货叉伸缩机构、丝杆螺母、导向滑块等。载货台虽非主要受力部件,但也应保证一定的强度,所以选择密度较低、强度较高的铝合金。按GB/T 6892—2000《工业用铝及铝合金热挤压型材》规定,选择7075铝合金以减轻质量和保证强度。载货台尺寸为580 mm×312 mm。载货台如图5所示。
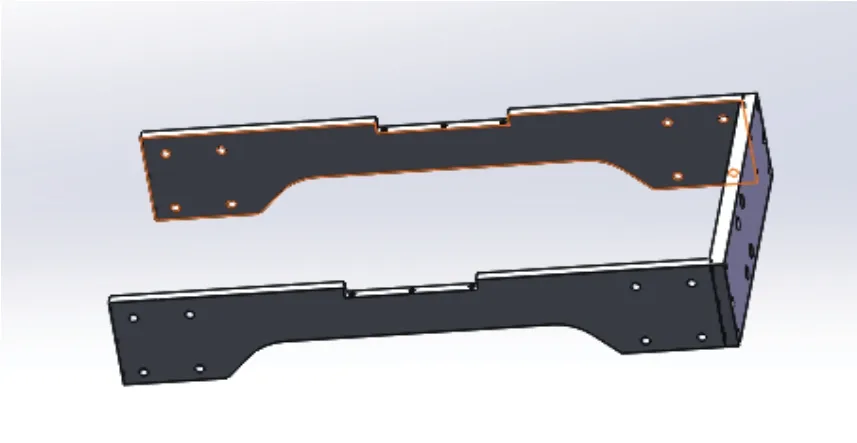
图5 载货台示意图
3 控制系统设计
堆垛机的控制系统是堆垛机实现所有动作的根本,良好的控制系统可使堆垛机稳定地完成每一个动作,实现堆垛机各机构相对平衡,进而稳定的运行。
激光定位单元和保护功能传感器与I/O模块一起构成堆垛机的控制系统,端口与PLC相连,接收堆垛机PLC控制器的指令并执行任务。操作人员只需在堆垛机提供的手动控制按钮端口输入指令,即可实现手动模式。图6为堆垛机工控系统机构框图。
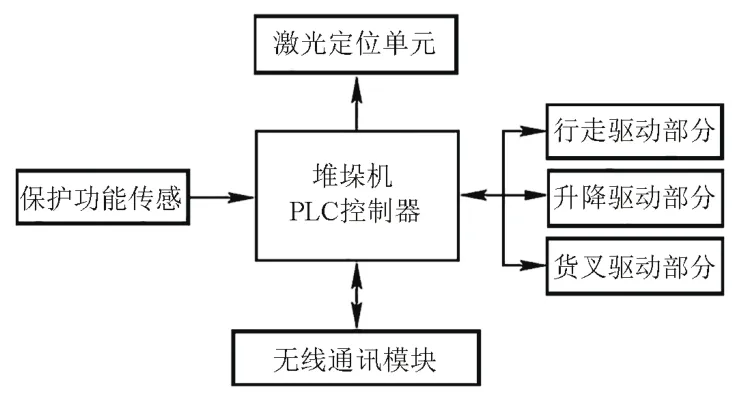
图6 堆垛机工控系统机构框图
可编程控制器(PLC)是一种基于数字计算机的通用工业控制设备,由可编程存储器来存储指令,执行诸如逻辑、序列、定时、计数和算术等功能,并通过数字或类似的输入/输出模块来控制各种机器或产品;其主要由中央处理器、存储器、电源、输入/输出模块、通信模块、可扩展模块和外部设备组成。传感器是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变成电信号或其他所需形式的信息输出,以满足信息的传输、处理、储存、显示、记录和控制等要求。在设计中,选用反射型光电传感器,型号为E3FDS30C1。主要是检测货仓中是否有物料,以防止双重入库,避免事故发生。
为了后期软件编程的顺利实施,需要根据功能要求和控制方案对PLC的输入输出进行端口分配。I/O端口的分配需要综合考虑控制系统功能及其实现方式。堆垛机的控制系统输入接口有24个,输出接口为11个,根据所需的输出/输入要求对其PLC控制系统的方式进行接口的接线,主要分布有输出与输入、控制信息以及I/O地址的分配,具体端口分配方案如表1、表2所示。
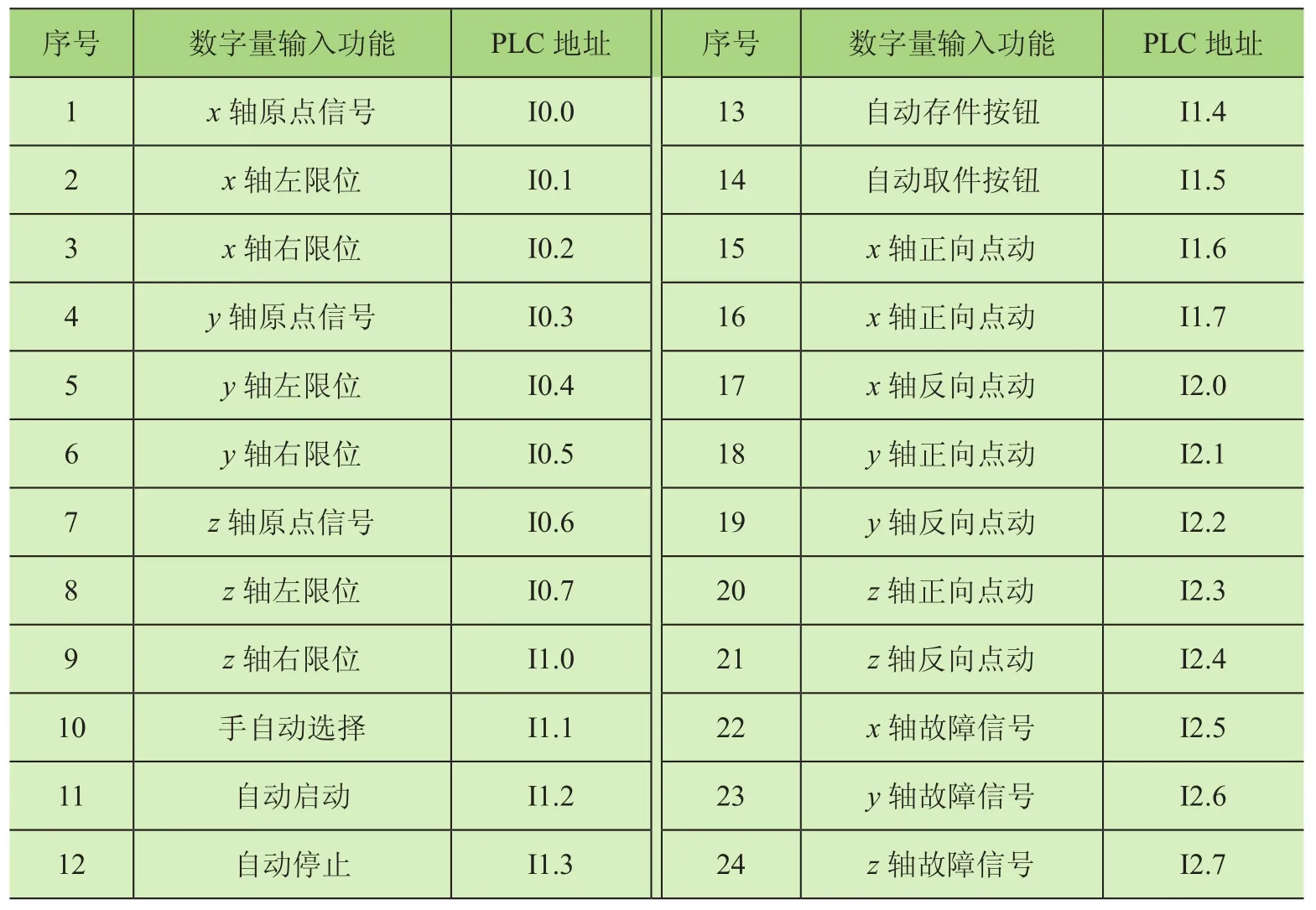
表1 PLC输入分配图
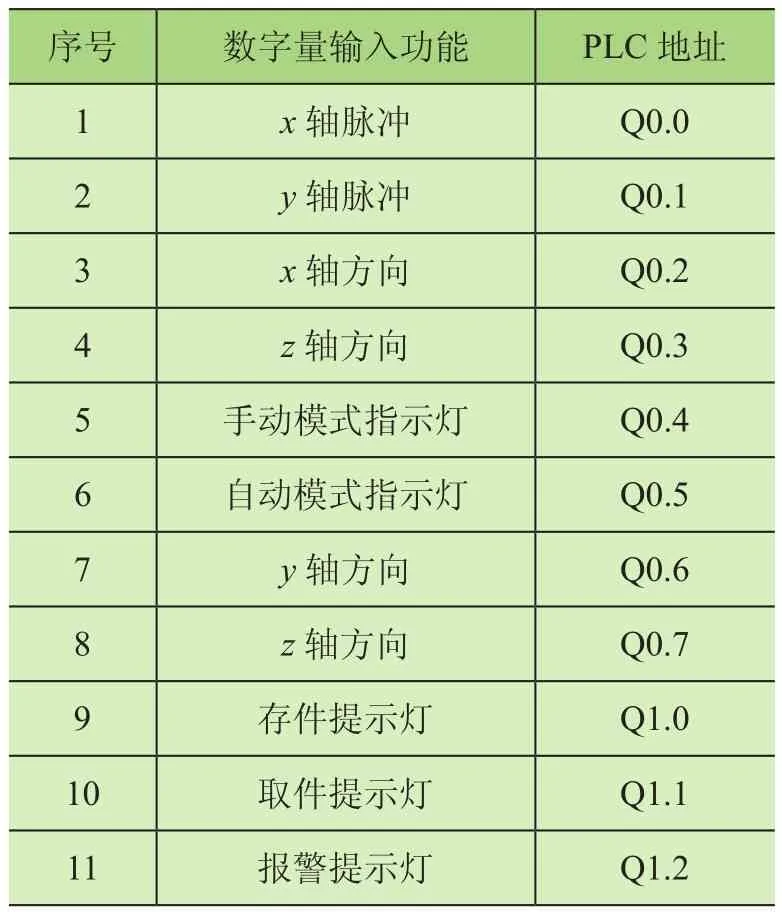
表2 PLC输出分配图
4 结束语
随着科学技术与社会生产力的进一步发展,生产过程的机械化、自动化趋势将会越来越明显,传统的手工操作、人工搬运等方式将会逐渐被淘汰,取而代之的将是以更加智能便捷的堆垛机为主的现代化生产方式。为实现堆垛机的诸多运动状态(包括堆垛机的水平行走、载货台的升降以及货叉的存取货物),本文对机架的外形结构和机械尺寸进行了分析和研究,分析了立柱的强度校核以及设计过程和要满足的需求。从总体方案入手,根据其工作特点,分析并设计了关键工件的机械结构,并依照模块化的方法对这些关键机械部件逐一进行了计算与校核。另外,还分析了控制系统的工作方案,介绍了PLC及传感器,并选用PLC和传感器型号。分析系统的I/O点位,编制了PLC控制程序。
