基于ROV操作的结构物水下切割技术
2022-01-10徐龙达胡振国张海涛张立喜
徐龙达,胡振国,张海涛,张立喜
海洋石油工程股份有限公司,天津 300457
ROV(RemotelyOperated Vehicle)通常称为水下机器人,它是一种由水面控制的水下作业系统,能在水下三维空间自由航行。通过外挂摄像头、避障声呐或管道跟踪器观察,再结合多功能机械手或其他水下工具,完成一定的水下作业任务。从勘探、钻井、检测及安装到水下设备的维护及更换等作业,均需用到水下机器人。完整的ROV系统主要包括一个潜水器、一个连接海面船舶控制室的脐带缆、一个系缆管理系统(TMS)、一个控制系统及一个收放系统(LARS)[1]。ROV本身包括主框架、推进器、照相机、机械手、声呐、视频工具、对接系统以及浮力模块等。
1 ROV分类
按照国际标准及工业惯例(IMCA R 004及NORSOK U-102),ROV按观察和作业能力可划分为5个类别[2]。
观察型ROV(见图1)只能完成水下纯粹的观察作业,不能携带任何水下作业工具和设备。通常仅仅配备相机、灯光和声呐的小型潜水器。其中一些可以附加一个处理传感器,诸如阴极保护(CP)测量系统或一个额外的视频摄像机。

图1 第一类——观察型ROV
带有负载能力的轻量工作型ROV(见图2)能够带有简单的设备完成水下观察作业,通常配备两个同时可见的摄像机及声呐系统,也能配备额外的传感器、摄像机及声呐系统。观察型ROV可独立作业或者用来辅助工作型ROV作业。

图2 第二类——轻量工作型ROV
工作级ROV(见图3)通常情况下带有机械手,能够完成水下较为复杂的工作;工作级潜水器形体较大,能够配备额外的传感器、机械手。他们的形体和动力通常较一、二类潜水器大。能够进行更广更深、负载更重的水下作业。现有的第三类潜水器可分为3种:第三种A(功率<73.5 kW)、第三种B(功率73.5~110.25 kW)、第三种C(功率>110.25 kW)。

图3 第三类——工作级ROV
重负载作业型ROV(见图4)主要指携带有挖沟机和挖沟犁等。此类潜水器通过车轮或轨道系统、推进器螺旋桨、水喷射动力或者这些推进方法的组合在海底移动。这些潜水器通常比工作级潜水器更大更重,专为特定任务设计,诸如电缆和管道埋设及开沟、开挖、疏浚海床及其他远程操作海底工程。
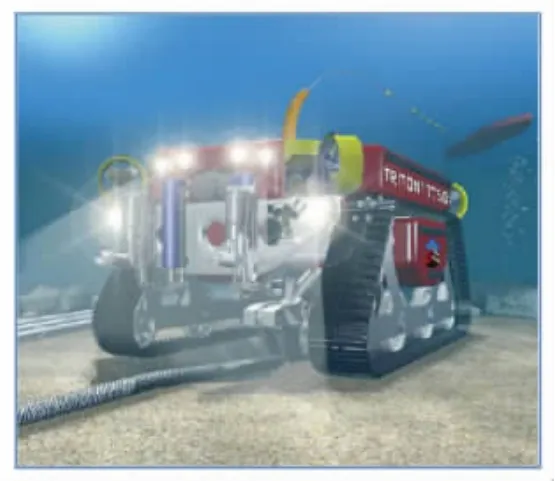
图4 第四类——重负载作业型ROV
工业上还存在“第五类”——仍在开发以及作为原型的潜水器(见图5)。不属于其他类别的专用潜水器也归于此类。自主式水下潜器(AUV)目前归到第五类。

图5 第五类——(原型或者开发)AUV
2 ROV的选择
为挑选水下施工期间最适合完成某一特殊任务或一系列任务的ROV,ROV参数(包括尺寸、质量、功率、有效载荷、推力和额定深度)均应根据要完成的任务、所需工具、界面连接水下设备、负载要求、通道类型以及工作环境(包括水深和海流)按照一定的过程(见图6)进行评估。
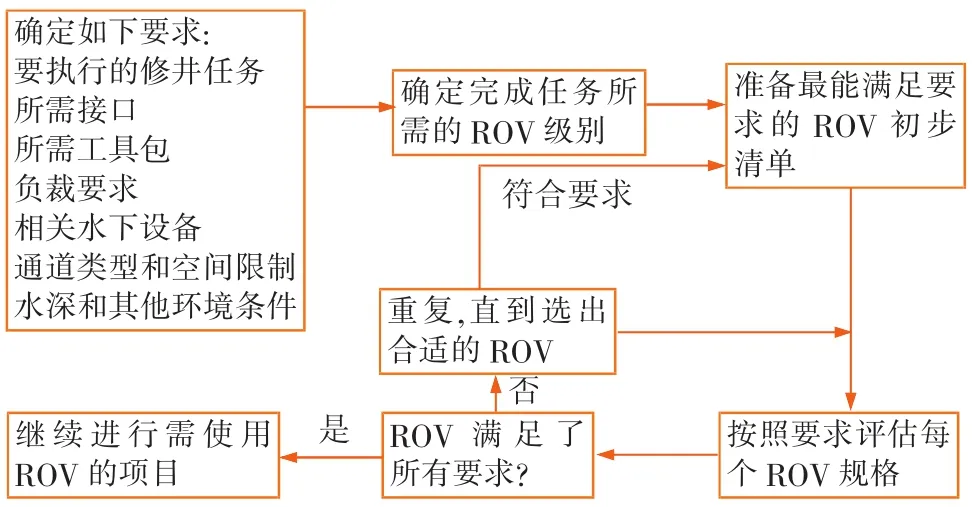
图6 ROV选择过程
当评估ROV是否能满足任务要求时,应考虑适用于每个ROV等级的参数。ROV选择过程开始时就应确定ROV要完成的任务[3]。这些任务通常分为如下类别(IMCAR004ROV安全有效作业实用规程):观察、测量、检查、施工、干预、埋管和开沟。
作为大多数ROV的基本模式,观察可通过摄像机完成。这可能要求ROV围绕着一个物体运动,进出某一结构,或静止不动。如果不要求完成其他任务,第一类和第二类的ROV通常足以完成观察任务。
测量总体包括水下观察,有时还包括声学测绘。测量可安排在管道、脐带缆和电缆安装、水下施工或设备安装/移除之前和/或之后,以实现:
(1)确定地理坐标。
(2)确保目标在允许的通道或区域内。
(3)确保目标得到妥善处理。
(4)识别管道的任何无支撑区域或长度。
(5)检查目标的物理状况。
根据要求的细化程度进行测量,可使用各种类别的ROV,主要是第二类、第三类以及第四类潜水器。
检验任务通常是针对海上结构和水下设备的特定的、预先确定的区域。这些任务通常包括详细的外观检查和其他无损检测(NDT),可能要求ROV装备其他传感器,如阴极保护(CP)测量探针。检验任务通常由第二类或者第三类的ROV完成。
施工任务包括涉及物理干涉的范围广泛的任务,如移除碎屑、连接或断开起重吊索和驱动阀门。ROV机械手是必要的,其能携带摄像机进入受限区域或从不同角度拍照。有些施工项目同时使用由一个或多个ROV操作的水下设备。施工任务通常由第三类ROV完成。
埋设和开沟操作通常在土壤特性良好的位置进行,通过配备适当开沟设备的ROV完成。埋设/开沟ROV的性能很大程度上取决于工作地点主要的土壤条件进行精确判定,以及面临的实际条件与ROV固有的设计开沟能力之间对应的情况。
干预任务通常由一个或多个干预装置配置的工作级ROV完成。这些任务包括:第一,水下设备/零部件的安装;第二,液压和电力线路以及控制跨接线的连接/断开;第三,阀门和液压功能的操作;第四,更换零部件(如控制阀、AX/VX环形密封件);第五,携带工具包完成特定任务,如出油管道、脐带缆和刚性管道短管的连接任务;第六,其他任务,如清洗、切割和钻孔。
表1展示了典型用途中需考虑的工作级ROV的一些最常见参数,包括额定深度、有效载荷、尺寸、质量和推力。有关工作级ROV的详细尺寸可参考ISO13628-8。应用示例为典型水下系统和水下任务的ROV选型。

表1 ROV规格
对典型工作级ROV的要求(尺寸类似的所有工作级ROV均在考虑之列)如表2所示。
寒冷的冬天在户外运动的话,帽子是必不可少的装备。我们知道头部是除了手之外裸露在外最大的区域,而且运动过程中大量出汗会使头部温度流失加快,很容易受寒而感冒,所以推荐使用头巾或者帽子对头部进行保护,可以有效减少身体40%~50%的热量丢失,以羊毛或者其他透气的材质为主。

表2 典型工作级ROV的要求
3 导管架水下切割设备的分类
导管架拆除是一种切割密集型作业。常常要求在整个结构的泥线上下对拉筋支撑、管道、立管、脐带缆、总管、导管架腿、钢桩、导向柱、链条等进行切割。水下切割是一项极为复杂且极具危险性的工作,因此在选择导管架结构水下切割方案时,必须对各种材料及不同几何形状截面的切割技术、工艺和设备进行考察。
国内外水下切割技术的发展已经比较成熟,并得到了广泛应用。目前常用的切割方法包括:潜水员水下电氧切割、高压水研磨料切割、金刚石绳锯切割、液压剪切割等[4]。
3.1 水下电氧切割
水下电氧切割(见图7)设备由电焊机、把线、割把以及氧气组成。切割原理是通过电弧放出热量,溶解掉金属以达到切割结构物的目的,提供热量的途径是电弧[5]。

图7 潜水员电氧切割
海洋石油工程股份有限公司现有的常用电氧切割电焊机主要有两种型号:一种品牌为唐王的电焊机,电流和电压的范围为:40A/21.6V~800A/44V;另一种品牌为“伊萨”的电焊机,电流和电压的范围为:20 A/20.8 V~650 A/40 V。在进行水下焊接或切割时,电流和电压要控制在上述范围内。水下电氧切割只能由经过相关作业培训并有资质的人员来执行,只能使用水面供给潜水设备并与潜水员保持通信。
3.2 高压水研磨料切割
高压水研磨料切割系统主要由控制室、高压水泵、空气压缩机、液压动力站、脐带盘和操纵器(内/外切割装置)6个主要部分组成(见图8),另外还需要配备供电系统[6]。

图8 高压水切割设备组成
高压水研磨料切割技术的基本原理是:水被加压形成连续、高速的射流,射流和固体的研磨砂被引入研磨砂喷嘴,在这里水流的一部分能量转移至研磨砂,研磨砂的速度急速增加,形成的高速、集中的研磨砂射流就像是一个液体的砂轮,其利用被携带在水柱中的研磨砂的动能对目标材料磨损,以此完成切割,切割过程中无振动和升温。
海洋石油工程股份有限公司现有2种水下高压水研磨料切割设备,其设备参数见表3。
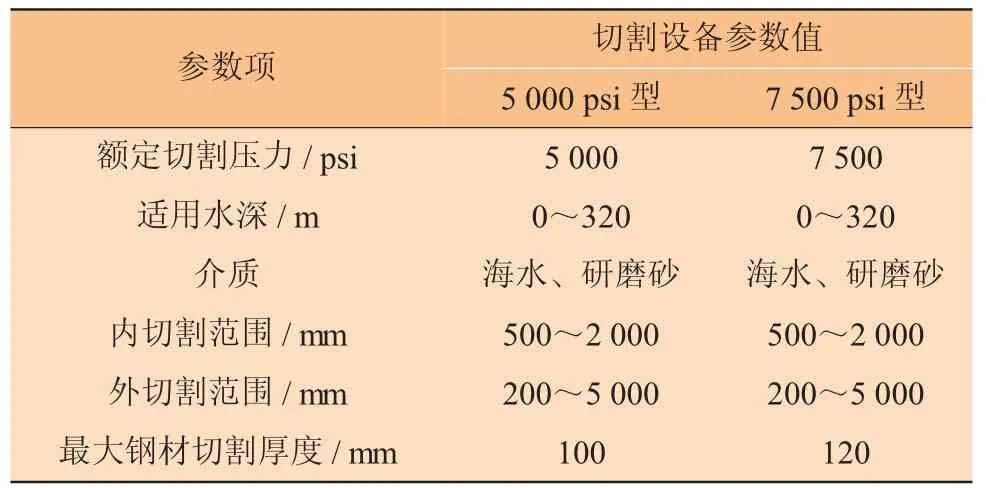
表3 高压水研磨料切割设备参数
3.3 金刚石绳锯切割
水下金刚石绳锯机系统(见图9)主要由主运动系统(驱动装置)、进给系统(进给装置)、手动张紧装置、自动夹紧装置、导向装置、切割框架以及锯弓板框架、液压动力源系统、控制系统等部分组成[7]。

图9 金刚石绳锯机总装示意
金刚石绳锯机工作时,先用夹持装置将金刚石绳锯机固定在待切割位置。4个导向轮中有1个或2个兼做主动轮,一套驱动装置带动主动轮旋转,使张紧的钻石线做循环运动,实现其沿管道的切向进给运动;另一套驱动装置推动切割框架做直线运动,实现钻石线相对管道的径向进给运动。张紧装置可以保证金刚石串珠绳在工作过程中始终处于张紧状态,保证切割所需的张紧力。如果绳锯机是在干式环境中工作,在切削工作区附近必须设有冷却系统,保证钻石线良好的切削环境和状态。水下绳锯切割机参数如表4所示。

表4 水下绳锯切割机参数
3.4 闸刀式管锯切割
闸刀式管锯简称为闸刀锯,主要由主运动系统(驱动装置)、进给系统(进给装置)、夹紧装置、切割装置、液压动力源系统、控制系统等组成。闸刀锯通过管锯的往复运动对管道实施切割,是一种常用的冷切割设备。闸刀锯在其切割范围内可以切割任何材质、任意壁厚的管道,且可以在管道外围的任何位置安装,其安装方向和角度对于切割效率没有影响。闸刀锯的主要工作参数见表5。
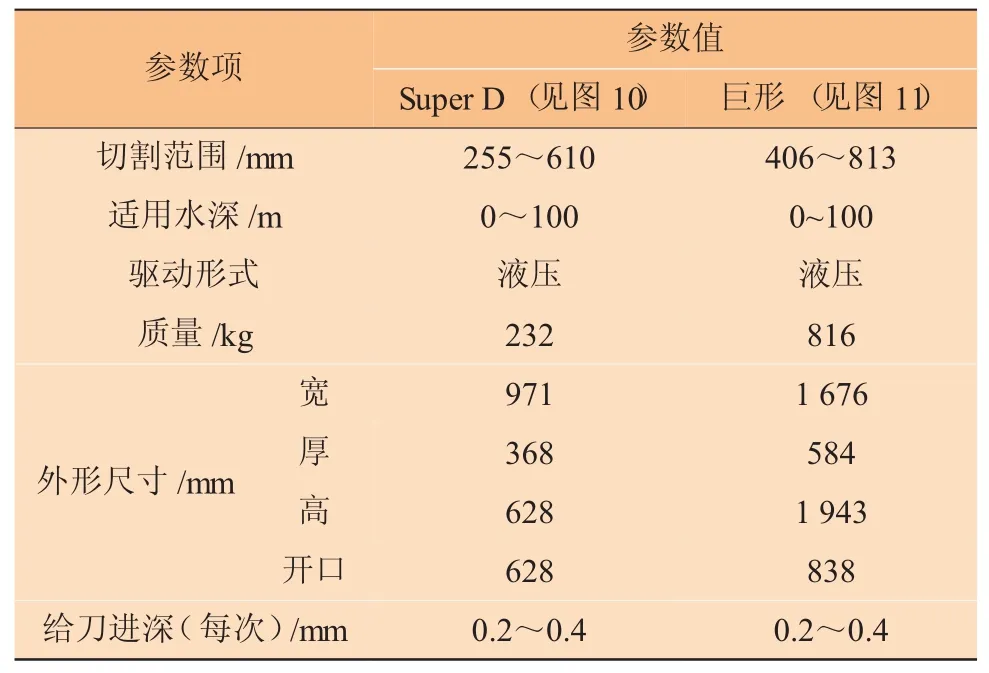
表5 闸刀锯参数

图10 Super D型闸刀锯
3.5 液压剪切割
液压剪(见图12)由本体结构和液压动力站组成。液压剪主要用于海上废弃平台拆解、石油天然气管道处理、海底管道处理、水下钢结构拆解、小型导管架拆解等。GENESIS(美国)GSS1500型液压剪主要参数见表6。

图11 巨形闸刀锯

图12 液压剪及配套液压动力站

表6 GSS1500型液压剪主要参数
4 水下切割设备的选择
废弃海洋桩基平台的切割是一项极为复杂且极具危险性的工作。该项工作在海上实施,接近油、气等易燃物质,稍有不慎就会造成爆炸或污染等严重事故。在选择海上结构拆除的切割方案时,必须对各种材料及不同几何形状截面的切割技术、工艺和设备进行考查。已开发的切割技术主要有:高压水研磨料切割、金刚石绳锯切割、闸刀锯切割、水下电氧切割、水下聚能爆破定向切割等。根据施工工况的不同,选择合适的水下切割设备尤为重要,其直接影响到项目施工效率。根据不同水深及拆除要求,可用于ROV配合的切割设备如表7所示。

表7 切割设备
5 基于现有切割设备与ROV配合的水下切割适用性分析
经资料对比分析,切割设备搭载ROV适用性分析如表8所示。

表8 切割设备搭载ROV适用性分析
装置需要满足的条件如下。
(1)满足API 17系列或ISO13628系列标准。
(2)设备在水中的质量轻(在空气中的质量不一定轻),对于重型设备需要增加浮力块进行减重。
(3)设备尺寸应尽量小,尺寸较大的设备ROV不易操作,且受水下海流影响大。
(4) 设备上具有ROV操作把手,操作把手的尺寸应满足API 17H规范要求。
(5)设备上的电液接口(如果有) 为水下可拔插形式。
(6) 通过ROV的观察,设备上的标识应清晰可见,满足API 17A要求。
(7)设备的工作空间应满足API 17H要求。
(8)设备可能需要增加支撑结构,需要根据使用工况进一步判断。
(9)设备的吊装可能需要具有升降补偿装置的吊机或者绞车,根据设备的具体使用工况判断。
(10)尽量避免在受限空间内工作,应该提前进行详细空间分析和ROV作业可操作性3D模拟;必要时采取ROV在陆地进行模拟操作,甚至可在测试水池或码头进行水下模拟操作。
现有切割设备均为成套大型设备,ROV搭载切割设备完成切割工作较困难,需要进行切割设备本体改造,改造后可能会对切割设备原有功能造成影响。通过对比分析,在水下切割过程中ROV主要可以完成以下辅助工作:其一,水下观察切割设备动态;其二,水下引导切割设备;其三,拔插切割设备电液接口;其四,对切割设备的施工位置进行微调;其五,操作水下ROV专用工具,进行水下作业,如切割缆绳、打磨清理等。
6 结束语
我国在平台拆除领域有巨大的市场需求,对平台拆除装置进行升级改造迫在眉睫。本文对ROV的类型和功能、切割设备的类别和功能分别进行阐述。通过适应性分析,描述了ROV搭载切割设备能完成的工作及对切割设备的改造。