高压直流附加阻尼爱克曼控制器的设计
2022-01-10朱显亮杨海波王海浩
朱显亮,戴 涛,杨海波,徐 恩,王海浩
(国网浙江省电力有限公司舟山供电公司,浙江 舟山 316021)
0 引言
在高压直流输电中,如果系统只有几个大型发电厂以及送端换流站群组成,则此系统称之为孤岛运行[1-3]。在我国西南部地区一些远离中心城市的大型发电厂基地,电网由于运行方式的变化,孤岛运行常有发生[47]。电网在孤岛运行方式时,交流部分相对于直流部分的占比明显降低,造成电力系统短路比降低。这种运行方式与非孤岛运行相比,电网在受到相同扰动时系统功率更容易发生振荡,进而引发更大的故障,造成HVDC失去稳定运行。鉴于此种情况下,研究HVDC孤岛运行对于提升电力系统稳定运行具有重要意义[8]。
文献[9-12]利用附加频率控制法分别设计出了阻尼控制器,通过调整系统送端直流侧的输电功率,实现快速抑制系统扰动,使系统恢复正常运行,提升HVDC 在孤岛运行方式下的输电能力。文献[9-10]利用PI控制法,通过多次改变系统比例与积分环节的参数来达到较为理想的控制效果,但PI控制法对于系统的运行方式适应性比较差,改变运行方式有可能造成PI控制器失去控制效果,对系统发生不同扰动的适应性也比较差。文献[11-12]采用多模块级联的方式设计出控制器,每个模块的控制参数需要根据一定的工程经验来确定,对于实际工程实践经验要求比较高,加之设计出来的控制器参数需要反复进行调节来达到理想的效果,这就造成工作量比较大。文献[2,13]分别采用鲁棒控制与根轨迹法控制,两者都采用单通道的控制方式,因为辨识出的传递函数阶数比较低,这就造成设计出的控制器不能抑制系统发生的全部振荡,对于系统发生的低频振荡有效果,对于系统发生的次同步振荡效果不明显。
鉴于以上设计控制器中存在的问题,本文提出了一种多通道带状态观测器的爱克曼控制方法,对HVDC 在孤岛运行方式下发生扰动时,实现对不同模态振荡的较好控制效果。电网发生故障时,低频振荡与次同步振荡往往同时发生,产生的原理又截然不同,但是通过给系统添加小的阶跃扰动,却可以辨识出不同振荡模态下的传递函数,设计出各自的控制器,使电网恢复正常运行[14-16]。本文通过在多通道中添加带通滤波器,使不同模态的信号在各自通道中定位运行。利用最小二乘旋转不变的辨识法,对各个通道中的模态进行辨识,得到各自模态下的传递函数。再根据带观测器的爱克曼法分别设计出对应的控制器,实现同时抑制各个模态的振荡,并设计出PI控制器与附加频率爱克曼控制器进行对比。
1 多通道附加阻尼控制器结构
考虑到附加频率爱克曼控制器在抑制低频与次同步振荡时,控制器针对不同的振荡模态会产生正负相反的阻尼,从而使控制器失去效果。因此在每个通道中添加带通滤波器,并根据系统存在的低频与次同步振荡频率,设置好对应的滤波器频率带宽,使每个通道中仅有一种振荡模态通过,减小了每个控制器之间的相互耦合影响,提升控制器之间的相互协调能力。通过调整送端功率大小,快速抑制各个模态的振荡。使孤岛运行下HVDC快速恢复稳定性。多通道HVDC 附加频率控制器结构如图1所示。

图1 多通道附加频率爱克曼控制器结构
2 附加阻尼爱克曼控制器原理
根据系统的状态反馈方程,选取系统的控制信号,利用爱克曼控制方程求取系统的状态反馈增益矩阵,并引入状态观测器,结合状态观测增益矩阵,最终设计出控制器。
考虑控制系统特征方程[17]为

式中:x为状态向量;x·为状态向 量导数;y为输出信号;y·为输出向量导数;u为控制信号;A为n×n维定常矩阵;B为n×1维定常矩阵;C为1×n维定常矩阵;D为常数。
选取系统控制信号为:

式中:K为状态反馈增益矩阵。
选取适当的K值使A-BK构成一个逐渐稳定的矩阵。如果A-BK的特征值都在s的左半平面,且当t趋于无穷大时,x(t)趋于0。则其特征值为期望极点。
假设系统是状态完全可控的,将控制信号u代入系统方程中得:

现在定义M=A-BK
则所期望的特征方程为

式中:a i为特征多项式;μi为特征值;I为单位矩阵。
由于凯来-哈密尔顿定理阐明M应满足其自身的特征方程,所以

利用上述方程可得确定状态反馈的增益矩阵K的爱克曼方程

由于系统的真实状态无法准确测量,所以引入观测器,将观测到的状态再次用于反馈。这样,在节省工作的同时,还能保证系统的可控性。从而设计出带观测器的爱克曼控制器[18-20]。基于爱克曼的状态-观测反馈控制系统如图2所示。

图2 基于爱克曼的观测-状态反馈控制系统
图2中,x为系统真实的状态变量,y为系统输出值。为观测器估计状态变量,为观测器输出,K为通过最优控制优化后的状态反馈,K e为观测器增益矩阵。一般要选择合适的观测器增益值使观测器极点比控制器极点快2~5倍。使观测器误差快速收敛到零。
由图2可得观测器状态方程为

对式(8)取拉普拉斯变换,取观测器初始状态为零可得

将式(10)代入式(9)中取拉普拉斯变换得爱克曼控制器-状态观测器传递函数

3 模型搭建及参数辨识
3.1 模型搭建
对某实际HVDC电网进行建模,在电力系统仿真软件PSCAD/EMTDC中搭建的模型如图3所示。

图3 孤岛运行仿真模型拓扑结构
此系统中主要考虑500 k V 线路,并对220 k V输电线路及相应的负载进行等值处理。孤岛运行时系统送端容量为1 600 MW,S、M电厂各开2台600 MW 发电机,U 电厂中只开1台600 MW 发电机。此模型中整流侧采用定电流控制,逆变侧采用定熄弧控制。在孤岛运行方式下,由于送端直流部分占的比重相对于交流部分比较大。因此当系统受到扰动时很容易使系统发生频率发生振荡,由于其短路比比较小。有可能引起系统更大的振荡,使系统失去稳定性,给HVDC 孤岛运行造成极大隐患。
3.2 传递函数辨识
利用TLS-ESPRIT辨识出系统孤岛运行方式下的振荡模态如表1所示。

表1 孤岛运行振荡模态辨识参数
由表1可知当系统送端功率降至25%单极运行时(送端功率为1 600 W),HVDC孤岛运行模式下发生低频与次同步振荡。其中24.5 Hz与13.4 Hz阻尼比比较小,系统次同步振荡比较强。0.72 Hz与0.74 Hz属于低频振荡模态,其阻尼比属于弱阻尼。
在系统处于稳定运行的状态下,在送端整流侧添加小幅阶跃扰动。以直流定电流侧小幅阶跃为输入,送端交流侧系统频率为输出。首先在不添加阶跃时取得数据,然后添加小幅阶跃,再取数据,然后两者差值。利用TLS-ESPRIT辨识算法,辨识出系统在不同振荡条件下的传递函数。
辨识出低频模态0.74 Hz的系统传递函数为

辨识出次同步振荡模态13.4 Hz的传递函数为

辨识出次同步振荡模态24.5 Hz的传递函数为

4 控制器参数设计
4.1 爱克曼控制器设计
在HVDC孤岛运行时,以S电厂发电机送端频率偏差为输入,附加频率控制信号为输出。按照带观测器的爱克曼法理论设计出爱克曼控制器。通过快速调整送端直流侧输送功率,快速抑制系统频率振荡,使系统恢复稳定性。控制器安装在整流侧定电流处,根据不同模态的开环传递函数分别设计出控制器。经过平衡截断法降阶后得出低频振荡模态0.74 Hz的附加频率爱克曼控制器-观测器传递函数为

经过平衡截断法降阶后得出次同步振荡模态13.4 Hz的附加频率爱克曼控制器-观测器传递函数为

经过平衡截断法降阶后得出次同步振荡模态24.5 Hz的附加频率爱克曼控制器-观测器传递函数为

4.2 PI控制器设计
设计出附加频率爱克曼控制器后,为比较控制器的效果,设计了PI控制器与附加频率控制器进行对比。利用TLS-ESPRIT 辨识出包含所有模态的传递函数,根据[9-10]设计出PI控制器与附加频率爱克曼控制器进行对比。比例环节参数取0.5,积分环节参数取3。其中washout为隔直环节-带通滤波器,时间参数T=8 s。控制器安装在整流侧直流定电流处,其结构如图4所示。
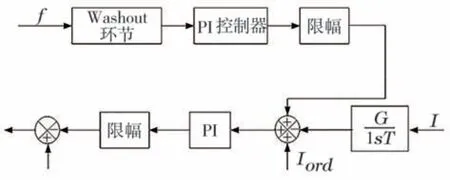
图4 PI控制器结构示意
5 仿真验证
5.1 阶跃扰动控制效果
设计完各个控制器以后,把上述带观测器的爱克曼控制器分别安装在各自模态的通道中定位运行。PI控制器安装在图4所示的整流侧定电流处结构中。然后通过分别添加阶跃扰动以及单相接地短路扰动故障,利用搭建好的PSCAD/EMTDC模型进行仿真验证。
1 s时在整流侧直流定电流处添加0.02倍的小幅阶跃扰动,使孤岛运行模型的送端功率升高至1.02倍。通过PSCAD/EMTDC仿真软件进行仿真,可得到系统低频与次同步振荡的仿真如图5-7所示。
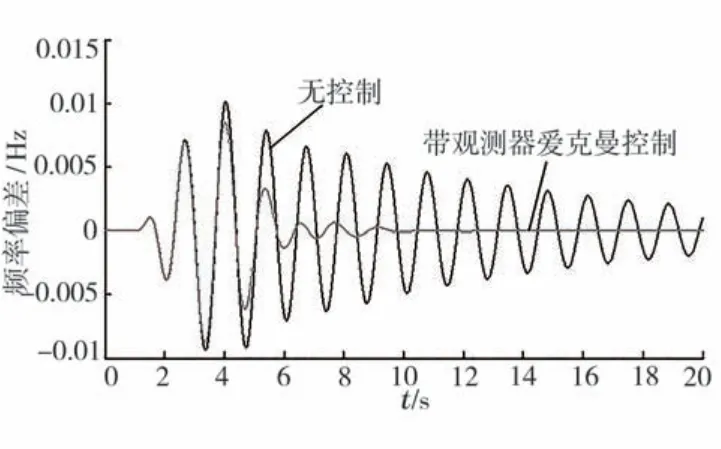
图5 阶跃扰动下送端交流侧低频振荡模态带观测器爱克曼控制与无控制对比

图6 阶跃扰动下送端交流侧次同步振荡模态13.4 Hz带观测器爱克曼控制与无控制对比
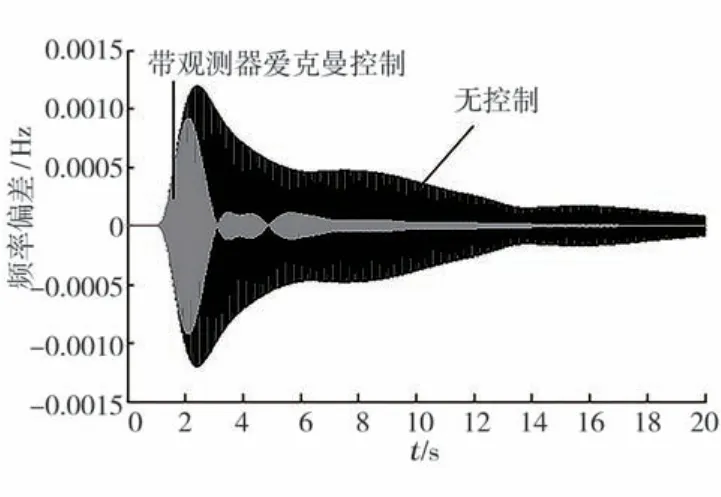
图7 阶跃扰动下送端交流侧次同步振荡模态24.5 Hz带观测器爱克曼控制与无控制对比
S电厂中仿真总图如图8所示。
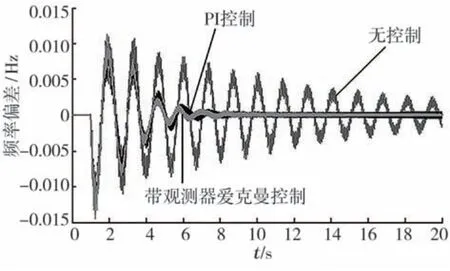
图8 阶跃扰动下送端交流侧S电厂振荡模态对比
U 电厂中仿真总图如图9所示。
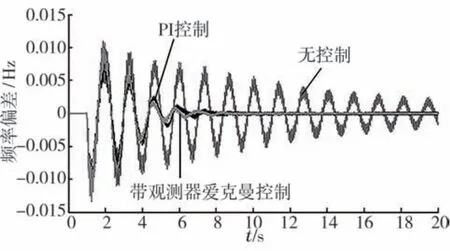
图9 阶跃扰动下送端交流侧U 电厂振荡模态对比
M 电厂中仿真总图如图10所示。
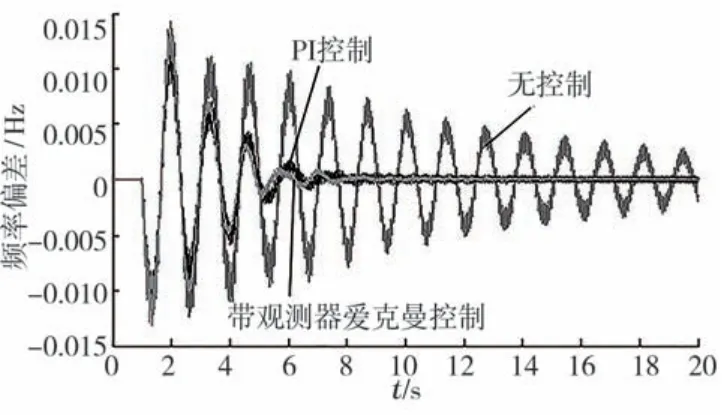
图10 阶跃扰动下送端交流侧M 电厂振荡模态对比
由图5-7可知附加频率爱克曼控制器可以较好地同时抑制低频与次同步振荡。由图8-10可知,而PI控制器也有一定的效果,但其对系统各模态的抑制效果不如带观测器的爱克曼控制器,由此可知比例积分控制器的鲁棒性能较差。
5.2 单相接地短路故障控制效果
1 s时送端交流侧500 k V 母线处发生单相接地短路故障,0.2 s后故障消失,通过在PSCAD/EMTDC搭建的某实际孤岛运行模型进行仿真。可得HVDC孤岛运行送端交流侧低频与次同步振荡模态的仿真图如图11-13所示。
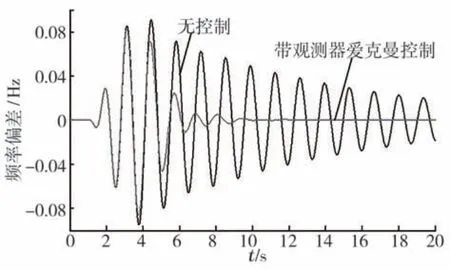
图11 单相接地故障下送端交流侧低频振荡模态带观测器爱克曼控制与无控制对比

图12 单相接地故障下送端交流侧次同步振荡模态13.4 Hz带观测器爱克曼控制与无控制对比

图13 单相接地故障下送端交流侧次同步振荡模态24.5 Hz带观测器爱克曼控制与无控制对比
S电厂中仿真总图如图14-15所示。
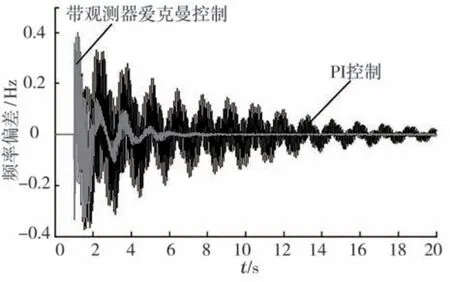
图14 单相接地故障下送端交流侧S电厂带观测器爱克曼控制与PI控制振荡模态对比

图15 单相接地故障下送端交流侧S电厂带观测器爱克曼控制与无控制振荡模态对比
U 电厂中仿真总图如图16-17所示。
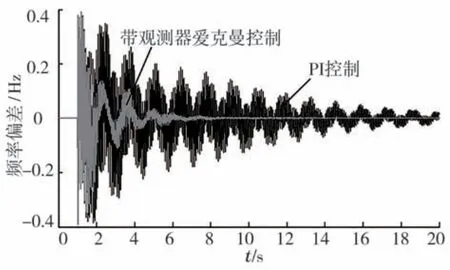
图16 单相接地故障下送端交流侧U 电厂带观测器爱克曼控制与PI控制振荡模态对比
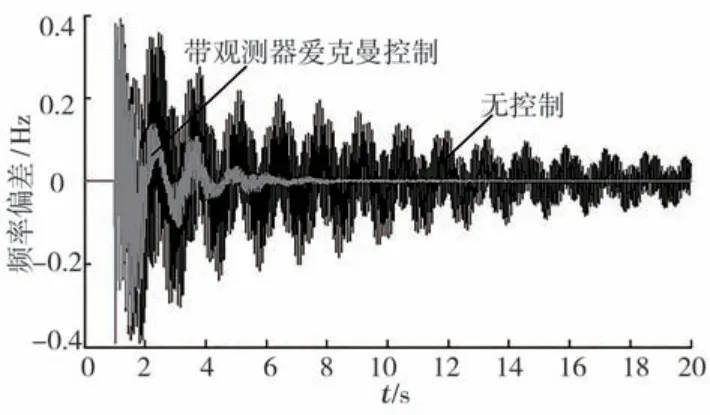
图17 单相接地故障下送端交流侧U 电厂带观测器爱克曼控制与无控制振荡模态对比
M 电厂中仿真总图如图18-19所示。

图18 单相接地故障下送端交流侧M 电厂带观测器爱克曼控制与PI控制振荡模态对比
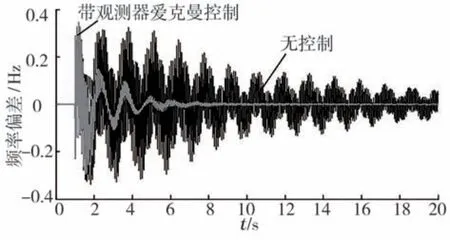
图19 单相接地故障下送端交流侧M 电厂带观测器爱克曼控制与无控制振荡模态对比
通过图11-13可知,带观测器的爱克曼控制器可以很好的抑制单相接地故障下,不同模态的振荡,结合图5-7可知对于不同的扰动,附加频率爱克曼控制器的控制效果都比较好,有较好的鲁棒性。而PI控制器的效果则不明显。由图8-10和图14-19可以得出,添加不同的扰动,附加频率爱克曼控制器的效果都较PI控制器好,PI控制器适应性比较差,可能会失去效果。

图8 不同环境温度下恒流充电单体电池最大电压差
6 结论
本文利用TLS-ESPRIT 辨识算法通过给系统施加小幅阶跃扰动,辨识出包含不同模态的传递函数。根据系统存在的低频与次同步振荡频率,设置好带通滤波器的频率上下限参数,使不同频率信号在各自的通道中定位运行,再次利用TLS-ESPRIT 辨识算法通过辨识得到了系统各个模态的传递函数。
根据系统各个模态的传递函数,利用本文提出的爱克曼控制原理,分别设计出不同模态对应的控制器。利用平衡降阶法,兼顾控制器的鲁棒性,得到阶数相对较低的控制器传递函数。添加滤波器减小了控制器之间的相互耦合影响,提高了控制器之间的相互协调性。
为比较爱克曼控制器的优越性,设计了PI控制器与其进行对比。电力系统仿真软件PSCAD/EMTDC仿真验证表明,附加频率爱克曼控制器可以较好地抑制低频与次同步振荡。对于不同的扰动,其效果都比较好,有较好的适应性,鲁棒性比较好。而PI控制器则对于运行方式比较敏感,对于不同模态下的振荡其效果没有带观测器的爱克曼控制器好。对于添加不同的扰动,PI控制器有可能会失去效果,适应性比较差,鲁棒效果不好。附加频率爱克曼控制器采用输出反馈,利于工程实践。
