蓝莓浆果收获机械的设计
2022-01-10吴玉娟董育亮唐肖瑞
吴玉娟,吴 丹,董育亮,唐肖瑞
(江苏农林职业技术学院,212400,江苏句容)
浆果是多汁肉质单果的统称,因其营养丰富肉质鲜甜备受推崇。蓝莓因花青素含量高享有“浆果之王”美誉,是人民群众竞相购买的优质水果之一,但蓝莓种植难、产量低和采摘烦,致使蓝莓等浆果价格一直居高不下,成为制约蓝莓浆果产业发展的瓶颈和掣肘,亟待各方协力予以破解。通过综合分析蓝莓浆果种植生产环节发现,人工采摘作业是浆果生产中最耗时、最费力的一个环节,需要动用大量人力进行采摘,成本占比高,人工成本成为影响该类水果价格的一项重要因素,因此,迫切需要开发一套适合我国蓝莓收获的自动化作业机械,对于提高蓝莓浆果产量和推动蓝莓浆果产业持续健康发展具有重要的现实意义。
1 蓝莓浆果收获机械总体设计
1.1 结构组成
为了解决蓝莓浆果收获采摘难的问题,实现蓝莓浆果收获机械装置的自动行走、远程控制、感知识别、快速采摘和整理收集等功能,研制开发的蓝莓浆果收获机械主要由自动行走装置、规划控制装置、快速收获装置、传感检测装置和整理收集装置等组成,蓝莓浆果收获机械结构组成如图1 所示。
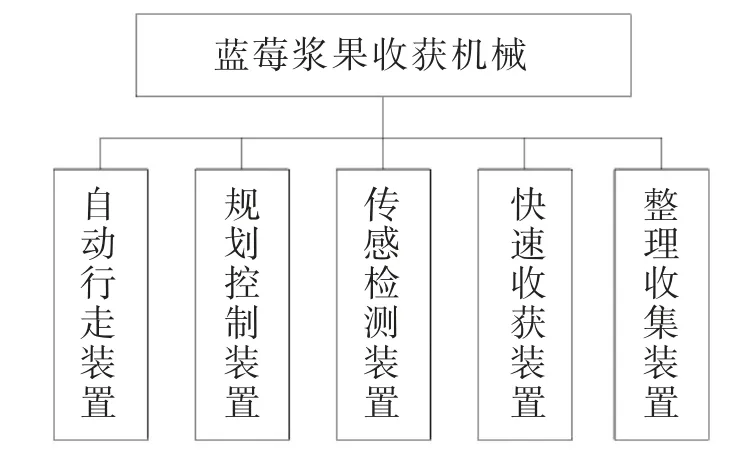
图1 蓝莓浆果收获机械结构组成
1.2 工作原理
自动行走装置主要用于支撑蓝莓浆果收获机械机动行进,它通常安装在机械本体底部,可以安装GPS/北斗装置进行精确导航定位;规划控制装置是机械的大脑,主要用于控制蓝莓浆果收获机械的机动行进和机械装置的快速采摘;传感检测装置主要运用传感器识别蓝莓的状态,为快速收获装置正常工作输出控制指令,即当传感检测装置采集到需收获的指令信息后,行走装置减速停车,收获装置通过电动伸缩杆完成相关收获动作;快速收获装置主要用于采摘蓝莓浆果,它采用电动可张合收获装置,通过伸缩装置安装在机械本体顶部,伸缩装置包括电动伸缩杆;整理收集装置主要用于收集整理蓝莓浆果。
2 蓝莓浆果快速收获装置设计
收获装置是蓝莓浆果收获机械的主要组成部分,它主要由收获筐、合页和电机等部分组成,如图2 所示。为了使收获装置成为有机整体,收获筐两端安装有合页,合页上安装有电机,通过电机控制收获框张合,将浆果树收拢在收获框内。另外,为了振动浆果树有力均匀,在收获框上间隔设有多个振动器9,振动器末端安装有振动杆,收获框底部安装有收集装置7,用于收集浆果。
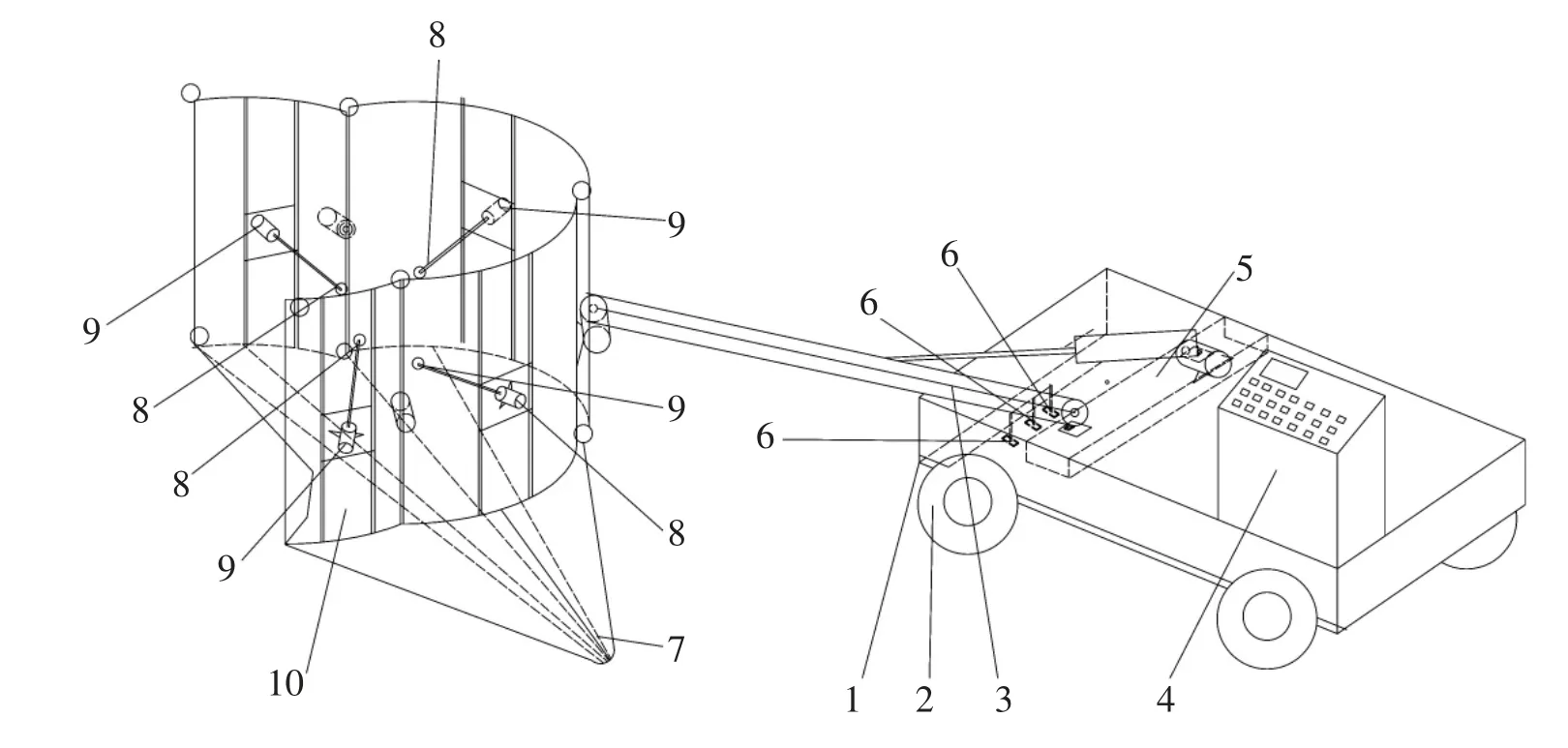
图2 浆果收获装置结构图
通过在规划控制装置中设置拍打频率和时间,控制收获框内的振动杆拍打浆果树枝,浆果从树枝上被拍落,落入下端的收集装置里。当完成相关收获机械动作后,电机张开收获框,电动伸缩杆使收获框离开浆果树,并折放置于机械本体上,使收获装置恢复到初始静止未收获状态。
3 蓝莓浆果收获机械规划控制模块设计
3.1 规划控制模块总体设计
为了能够即时便捷控制自动行走装置和收获装置,基于Arduino 编程语言进行规划控制装置设计开发。具体来说,通过Arduino IDE 平台设计开发自动行走控制模块,实现对浆果收获机械行走功能的自动控制;设计开发了收获装置控制模块,由手持式按钮盒上按钮进行设置,完成蓝莓浆果收获装置工作指令的输出。
3.2 行走控制模块设计
行走控制模块是规划控制装置的基础,目的是实现蓝莓浆果收获机械行走轮和编码器传动联接。
采取检测信息判断的方式进行信号检测,即当安装在底部的传感器检测装置未检测到有效信号时,行走装置继续匀速向前行走;当检测到有效信号时,行走装置减速停车,并控制电动可张合收获装置动作,收获装置在设定时间内完成相关收获机械动作后,收获装置恢复到初始静止未收获状态,行走装置取消停车,并继续向前运行。
3.3 收获控制模块设计
收获控制模块是规划控制装置的核心,目的是实现蓝莓浆果收获装置自动收获。可采取标准工作流程法设计该控制模块,即传感检测装置检测到需收获蓝莓浆果的收获信号时,行走装置减速停车,收获装置通过电动伸缩杆和相关铰链,从机械本体处向上、前折翻,并向浆果树靠近,电机控制电动收获框张开并靠近浆果树,再通过张合电机合拢收获框,将浆果树收拢在收获框内。通过设置合理的拍打频率和时间间隔,控制收获框内振动杆拍打浆果树枝。振动杆拍打浆果树枝,浆果从树枝上被拍落,落入下端的收集装置中。当按照设定时间完成相关收获机械动作后,张合电机张开收获框,通过电动伸缩杆使收获框离开浆果树,并折放置于机械本体上,使收获装置恢复到初始静止未收获状态。
4 蓝莓浆果收获机械操控流程设计
为了实现蓝莓浆果收获机械高效运行,在研制开发蓝莓浆果收获机械过程中,对收获机械的操控流程进行标准化设计,概括起来主要包括以下4 个步骤,如图3 所示。

图3 蓝莓浆果收获装置操控流程
(1)依托收获机械规划控制装置控制蓝莓浆果收获机械本体匀速向前行走。
(2)安装在机械本体底部的传感检测装置通过检测地面定位点,有效检测信号用以确定机械本体停车位置以及电动可张合收获装置动作。
(3)通过设置拍打频率和时间,控制收获筐内振动杆拍打浆果树枝。
(4)振动杆拍打浆果树枝,浆果从树枝上被拍落,落入下端的收集整理装置里,当按照设定时间完成相关收获机械动作后,张合电机张开收获框,通过电动伸缩杆使收获框离开浆果树,并折放置于机械本体上,使收获装置恢复到初始静止未收获状态。
5 结语
基于嵌入式软硬件开发技术、电子技术和通讯技术,研制开发了集自动行走、感知识别、快速收获和整理收集等功能于一体的结构轻便的蓝莓浆果收获机械装置,对于降低采摘工人的劳动强度、提高蓝莓浆果的收获效率具有重要意义,通过实践应用试验得出了以下结论:
(1)自动行走装置行进路线规划控制功能大部分满足使用需求,但在卫星导航信号遮蔽的情况下,行进路线控制指令有时还不够稳定。
(2)收获装置振动拍打频率是确保收获运行是否高效的关键所在,采用反复试验预置的方式可满足使用需求。
(3)通过选用48 V 电压锂电池能够满足持续工作4 h 的功耗要求。
