基于虚拟正阻抗的地铁牵引传动系统直流侧振荡抑制策略
2022-01-10李婷婷葛兴来
李婷婷,胡 晓,刘 川,杨 静,葛兴来
(1.成都运达科技股份有限公司,四川 成都 610097;2.西南交通大学 磁浮技术与磁浮列车教育部重点实验室,四川 成都 610031)
0 引言
由于地铁车辆空间有限,其牵引传动系统主电路滤波器件尺寸受限,参数选值难以达到系统稳定性的要求;并且,由于系统线路阻抗较小,难以实现稳定阻尼的作用。更重要的是,牵引电机在恒功率控制下呈现出的负阻抗特性,进一步削弱了系统阻尼[1-2];在受到外界激励源的干扰下,容易引发地铁牵引传动系统直流网侧电压、电流的持续振荡。
为抑制直流侧可能出现的振荡现象,相应的控制策略被提出,主要分为被动阻尼与主动阻尼控制2种。被动阻尼控制策略一般采用增加额外装置实现振荡抑制,而这将会增加系统的成本和复杂性[3-4];并且,针对不同的系统,所选择的装置可能不同,通用性欠佳。主动阻尼控制策略一般在控制系统进行补偿从而实现振荡抑制,具有易于实现和灵活性好的优点,因而受到更多的关注[5-6]。
为抑制牵引传动系统中的直流侧振荡,文献[5]提出了一种基于前馈电压补偿的振荡抑制方法,其通过在控制方案中对前馈电压进行动态调节,实现直流侧电压振荡的有效抑制。文献[7]在基于矢量调速方案中,通过动态调节转矩电流的给定值,增加主电路正阻抗从而抑制直流侧振荡。这种方法不需要改变系统的结构,但是电压、电流信号的注入可能会导致牵引系统产生转矩脉动,同时系统的动态响应和效率也受到一定的影响。
针对上述问题,本文提出了一种基于虚拟正阻抗的主动阻尼控制策略,用于抑制地铁牵引传动系统直流侧振荡。首先,根据地铁牵引系统的简化线性化模型分析直流侧振荡机理;然后,基于虚拟正阻抗的主动阻尼直流侧振荡抑制策略,利用低通滤波器和直流侧电压得到直流侧电压扰动分量,通过改变电压扰动分量的极性,实现负阻抗特性的补偿;最后,通过仿真验证了所研究主动阻尼策略的有效性。
1 地铁牵引传动系统线性化建模
为便于对地铁牵引传动系统进行稳定性分析,因此对其进行线性化建模。图1(a)为地铁牵引传动系统结构。由图可知,地铁牵引传动系统由直流侧电压输入vdc,LC滤波器,逆变器以及牵引感应电机(induction motor, IM)组成。其简化模型如图1(b)所示。在恒功率控制条件下,逆变器与电机负载可等效为恒流源(iinv)。其中,Ldc,Rdc分别为滤波电感和线路等效电阻,Cdc为滤波电容,ig为网侧电流,Eg为网侧电压,vdc为直流侧电压,iinv是输出到逆变器的电流,PL为电机侧功率,Te为转矩,ωr为电机转速,us为电机定子电压,is为电机定子电流,上角标“*”代表的是指令值。
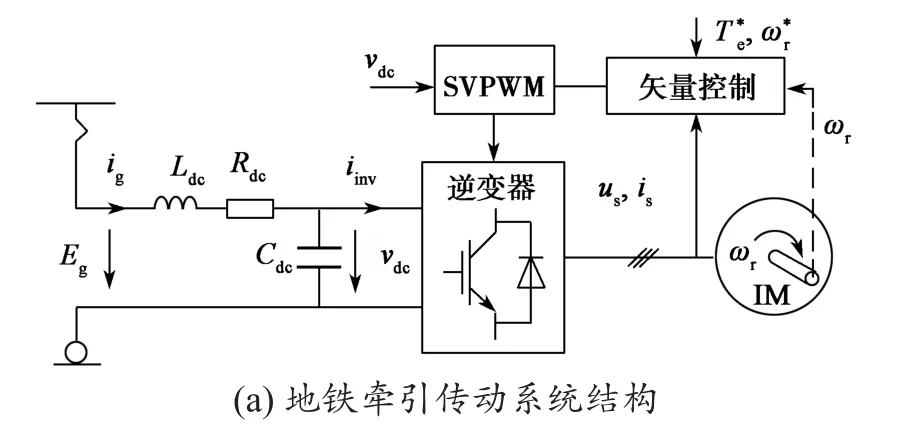
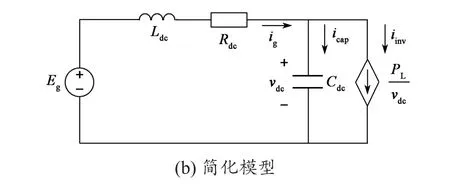
图1 地铁牵引传动系统结构图及其简化模型Fig. 1 Block diagram of a typical metro traction drive system and its simplified model

2 基于虚拟正阻抗的主动阻尼抑制策略

综上,可以得到v′dc的重构框图(图2)。
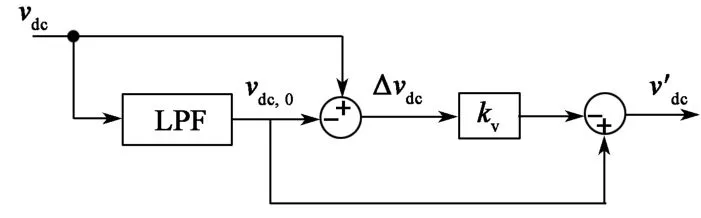
图2 直流侧电压重构框图Fig. 2 Block diagram of DC-link voltage reconstruction
3 仿真与实验验证结果
为验证本文所提基于虚拟正阻抗的主动阻尼控制策略的有效性,利用Matlab/Simulink仿真工具以及RT-LAB硬件在环实验平台对其进行测试(图3)。测试用地铁牵引传动系统框图和参数分别如图3和表1所示。图3中,ψr为转子磁链幅值;isd和isq分别为定子电流d轴和q轴分量;Esd和Esq分别为前馈电压d轴和q轴分量;usd和usq分别为定子电压d轴和q轴分量;usα和usβ分别为定子电压α轴和β轴分量;Usd和Usq分别为d轴和q轴电流环输出;isa,isb和isc分别为定子三相电流;θ为转子磁链角。
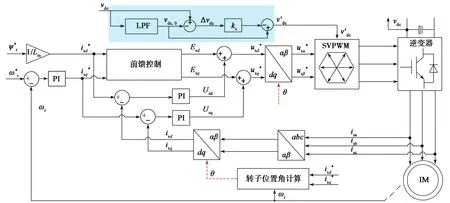
图3 基于主动阻尼控制的地铁牵引传动系统框图Fig. 3 Block diagram of the metro traction drive system with the proposed active damping control method

表1 仿真和实验参数Tab. 1 Simulated and experimental parameters
3.1 仿真结果
为验证额定工况下的稳定性控制效果,在仿真测试中,负载转矩被设置为900 N·m (额定转矩),电机转速稳定控制在2 100 r/min,虚拟正阻抗的增益系数kv=1。图4给出了未采用所研究主动阻尼控制策略的直流侧电压及其快速傅里叶变换(fast Fourier transform,FFT)分析结果。由测试结果可知,在负阻抗作用下,牵引传动系统直流侧电压出现明显振荡;由FFT分析结果可知,振荡频率为LC谐振频率。作为对比,图5中给出采用基于虚拟正阻抗的控制策略的直流侧电压及其 FFT分析结果。由图5可知,采用该控制策略后,牵引传动系统的直流侧电压波形振荡幅值较小,LC谐振频率附近谐波分量较小,这意味着直流侧振荡已被有效抑制。
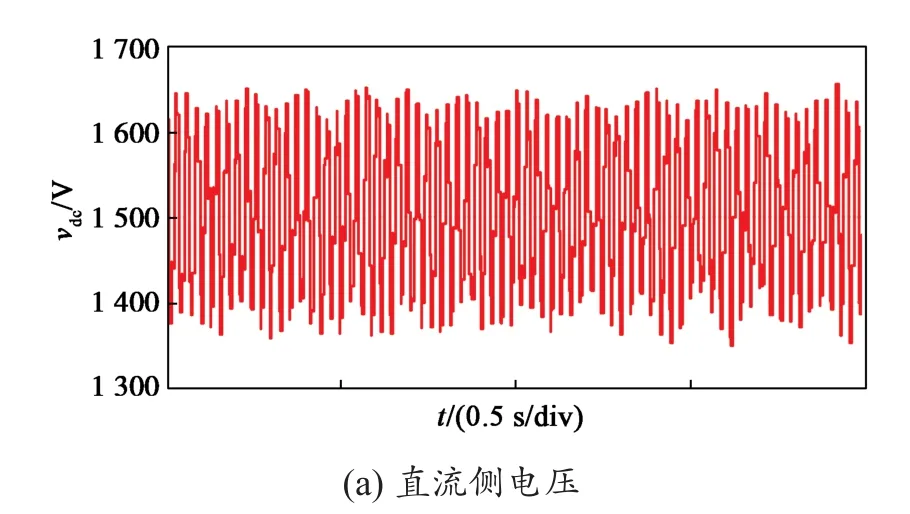
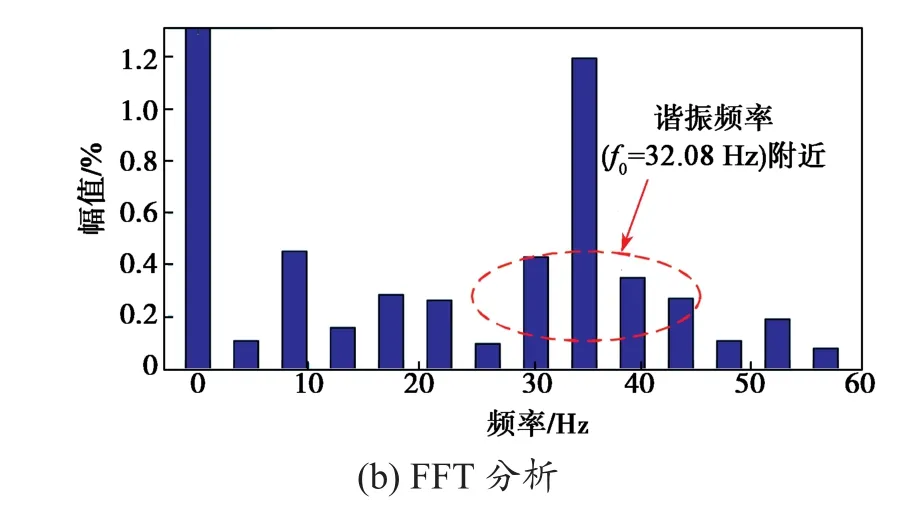
图4 未采用本文所研究主动阻尼抑制策略的直流侧电压仿真结果Fig. 4 Simulation results of DC-link voltage of the traction drive system without the proposed active damping control

图5 采用本文所研究主动阻尼抑制策略的直流侧电压仿真结果Fig. 5 Simulation results of DC-link voltage of the traction drive system with the proposed active damping control
为验证本文所研究的基于虚拟正阻抗的主动阻尼控制策略的有效性,图6给出了在采用抑制策略以及未采用抑制策略下的网侧电流、电机转速及电机转矩的对比波形,其中虚线左侧为采用主动阻尼控制的测试结果,图中虚线右侧为未采用主动阻尼控制的测试结果。通过图6的对比结果可以看出,相较于未采用该抑制策略的牵引传动系统,采用主动阻尼控制策略后,牵引传动系统稳定性得到明显提升。未采用主动阻尼控制的网侧电流振荡幅值明显大于施加抑制控制后的网侧电流扰动幅值。施加主动阻尼控制的电机转速以及转矩振荡幅值均小于未施加主动阻尼控制的振荡幅值;并且,加入主动阻尼控制后,电机侧的输出特性更加稳定。
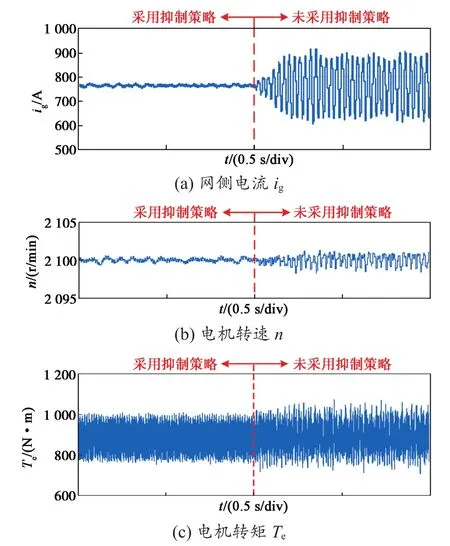
图6 采用所研究主动阻尼控制策略的地铁牵引传动系统仿真结果Fig. 6 Simulation results of the metro traction drive system with the proposed active damping control strategy
3.2 实验结果
为进一步验证所研究的抑制策略的有效性,还进行了硬件在环实验测试,硬件在环测试框图如图7所示。
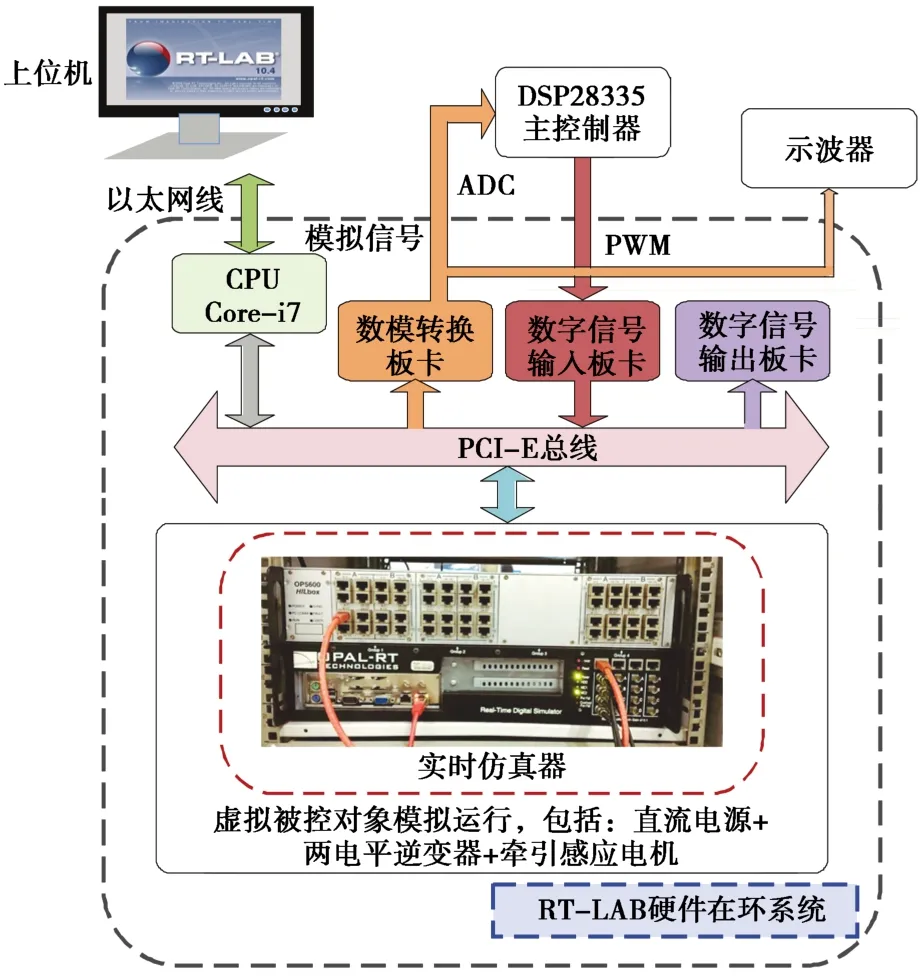
图7 主动阻尼抑制策略的硬件在环测试框图Fig. 7 Block diagram of the HIL test system
图8示出未施加主动阻尼控制策略的牵引传动系统实验测试结果。图中电机转速由0上升并稳定至2 100 r/min,负载转矩从空载增加至900 N·m,虚拟正阻抗的增益系数kv=1。波形由上至下分别为网侧电流ig、直流侧电压vdc、转子速度n以及电磁转矩Te。当电机运行在额定工况时,网侧电流与直流侧电压出现等幅振荡,其中网侧电流、直流侧电压最大振幅分别为200 A与300 V。在实际牵引传动系统中,一旦发生这种持续性的振荡,由于振荡幅值较大,极易引发牵引变流器过压过流保护动作,进而封锁脉冲,迫使列车停车。
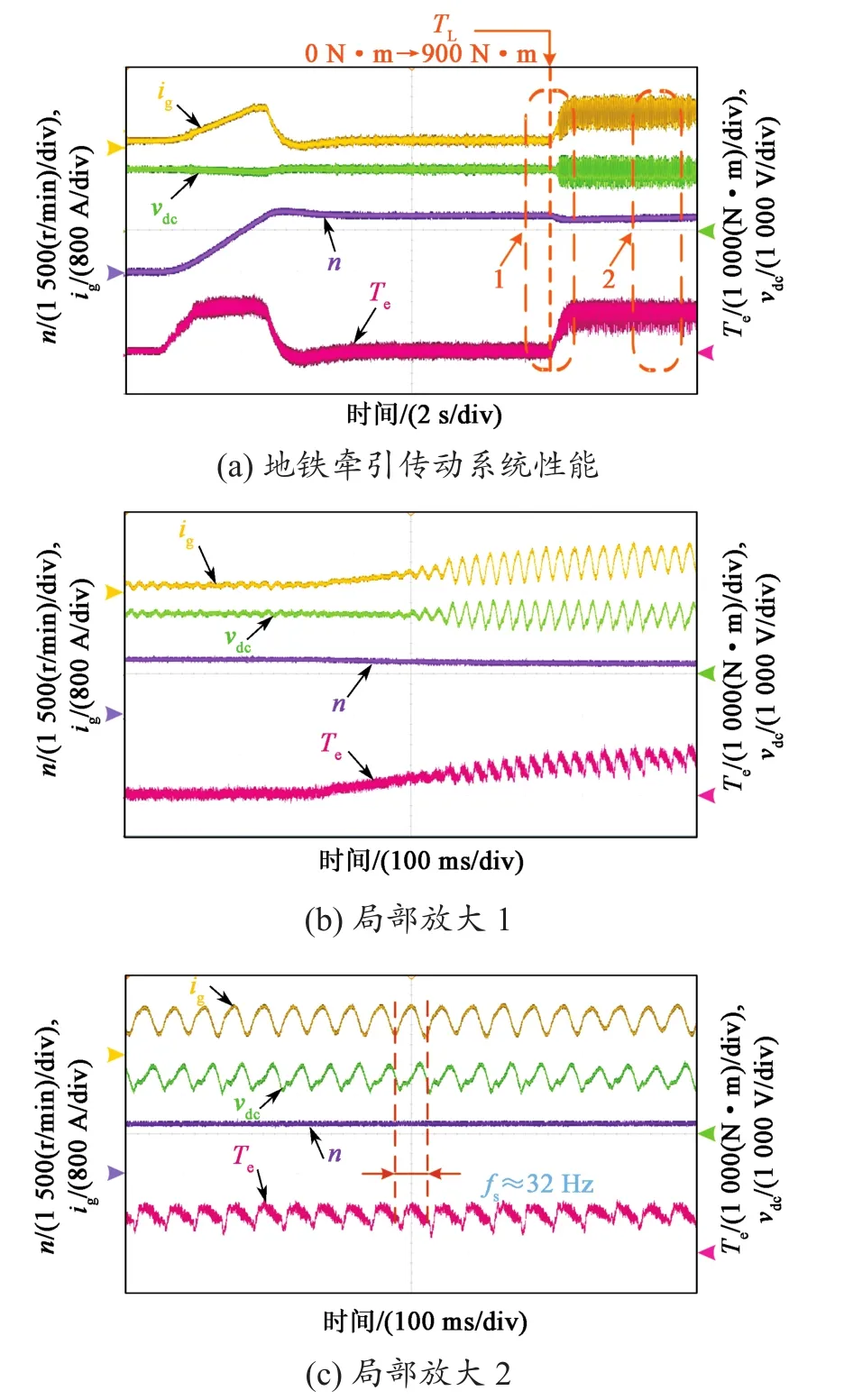
图8 未采用抑制策略的地铁牵引系统实验结果Fig. 8 Experimental results of the metro traction drive system without the proposed active damping control strategy
图9示出施加基于虚拟正阻抗主动阻尼控制策略的牵引传动系统实验波形。由图可知,当系统运行至额定工况时,系统能够继续稳定运行,直流侧振荡得到有效抑制,从而验证了本文所研究主动阻尼控制方案的正确性和有效性。

图9 采用该抑制策略的地铁牵引系统实验结果Fig. 9 Experimental results of the metro traction drive system with the proposed active damping control strategy
4 结语
本文研究了一种基于虚拟正阻抗的主动阻尼控制策略,用于抑制地铁牵引传动系统直流侧振荡。在该控制策略中,首先提取直流侧电压扰动分量,针对电压扰动分量引入增益因子来提升系统阻尼实现牵引传动系统的稳定运行;并分析了不同增益系数对系统的影响。仿真和实验测试结果表明,所研究的主动阻尼控制策略可以有效地抑制直流侧电压振荡,显著提高地铁牵引传动系统的稳定性。后续将探究所研究抑制策略在不同调制方式下对系统性能的影响。