基于分形维数的自适应窗口DAVAR改进算法
2022-01-10王梓帅杨银芳
王梓帅,刘 星,闫 曌,杨银芳,喻 佩
(1 西安工业大学电子信息工程学院,西安 710021;2 西北工业集团有限公司,西安 710043;3 西安北方光电科技防务有限公司,西安 710043)
0 引言
目前微机电(MEMS)陀螺传感器多用于惯性导航技术中角速度的测量,在低精度军用、民用领域有广泛应用。但相对光纤陀螺、激光陀螺精度较低,需要采用Allan方差[1-4]及其拓展动态Allan方差[5-6]、交叠式Allan[7]方差等方法,对陀螺输出信号进行误差辨识,为下一步滤波提供依据。
动态Allan方差(DAVAR)最初是一种分析原子钟时变稳定性的工具,其本质是通过使用窗函数在不同的时间间隔内计算Allan方差,最终将得到的结果绘制在三维图形内进行分析。但由于窗函数的长度缺乏灵活性,在信号追踪能力和方差置信度无法兼顾[8],会对分析的结果产生诸多弊端。汪立新等引入截断窗内峭度值,并建立以峭度为变量的自适应窗函数[9];杨浩天等提出了一种σ2作为判据动态调整自适应窗函数截取信号[10];张娜等提出窗函数组合法和噪声量值二维表示法对DAVAR进行改进[11],但依然不能精确评估各噪声的变化特征。
针对传统DAVAR法存在的不足,文中提出一种基于分形维数调整窗长的改进DAVAR算法。
1 Allan方差理论及分形维数
1.1 Allan方差原理

(1)
取不同τ下的σ2(τ)绘制成Allan方差曲线。
1.2 误差模型
如表1所示,不同功率谱密度分布的噪声会在Allan方差中以不同分量形式体现,即可辨识随机误差的各类噪声项。

表1 MEMS陀螺随机误差项Allan方差特性
假设各噪声源统计独立,则Allan方差拟合模型可表示为:
(2)
1.3 分形维数计算与判据
分形理论从时间序列数据中研究复杂非线性问题,是描述信号无序程度和复杂度的无量纲指标[12]。对于噪声信号,分形维数越大表明该信号复杂度和非平稳性高,越小表明信号越单一且具有规律性[13]。常见的分形维数计算方法有[14]:计盒维数法、关联维数法、Hurst指数法、小岛法、半方差法[15]等。
测量时间序列得到z(t),其半方差为:
(3)
式中:j为测量时间序列号;Δt为间距。对于分形曲线,存在Δt与r(Δt)的幂值关系r(Δt)∝Δtp,其中p为幂指数,将Δt与r(Δt)绘制到双对数曲线中,回归后,可以得到其斜率为p,则分形维数值为:
(4)
根据分形维数的定义,当信号发生较大的波动时,区间分形维数增大,D值不断增加。因此可以将D值作为检测突变信号的判据,根据D值的变化来实时表征信号突变特征。
2 DAVAR的窗函数设计
DAVAR是在Allan方差的基础上,利用滑动窗函数原理,在不同相关时间内利用矩形窗函数截断输出数据,重复估计Allan方差,将结果绘制在三维图形中,对信号的评定不再局限于二维曲线中。
窗函数长度的设计,影响算法跟踪动态噪声的快慢。短窗口内数据少,跟踪及时,但会导致方差的置信度降低;长窗口利于计算,估计置信度越高,但抗干扰能力弱,无法及时跟踪突变。
以D值为判据设计改进窗长函数为:

(5)

(6)
通过改进窗长函数,能保证随着信号的突变程度来实时改变窗口长度。
3 D-DAVAR改进算法设计
以分形维数为依据的D-DAVAR算法具体步骤如下:
1)对随机信号z(t),时间起始点设为t1。
2)z(t)被中心点t1、起始宽度为W(t1)的窗函数截断,获得窗口截断信号yW(t1),支撑变量t′描述窗内渐逝的时间为:
(7)
长度W(t)的矩形窗函数PW(t)定义为:
(8)
则截取信号为:
yW(t1,t′)=y(t′)PW(t1-t′)
(9)
3)根据式(4)计算截断信号yW(t1,t′)的D(t1),按照式(5)确定下一时刻窗长。
4)建立一个增量过程,Δ(t1,t′,τ)定义为截断信号yW(t1,t′)与Allan窗口hτ(t′)的卷积:
(10)
其中:
(11)
参数0<τ≤τmax,τmax是最大观察间隔,通常取τmax=W/3,则可以定义为:
(12)
将t1时刻动态Allan方差定义为总体平均值:
(13)
式中〈〉为求总体平均符号。
5)通过最小二乘法,即可拟合分离出当前时刻陀螺的各项噪声系数。

7)将结果绘制在三维图中。
4 仿真及结果分析
为了验证文中提出的改进方法,采集某MEMS陀螺动态输出信号,预处理后采样4 000个数据,采样周期20 ms,输出信号如图1所示,图中z(t)代表MEMS陀螺动态输出。

图1 陀螺仪输出信号

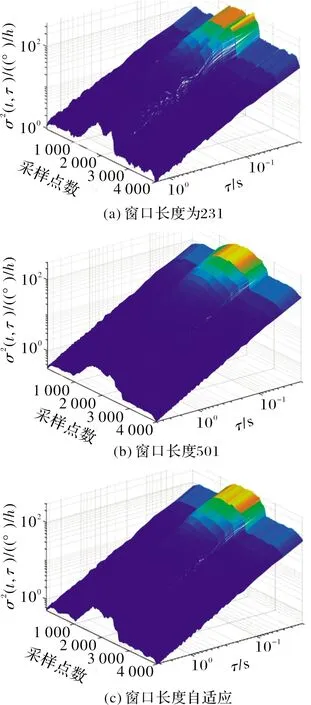
图2 不同窗口长度的DAVAR分析
由图2可看出:改进方法将长短窗口的显性优势结合,信号突变处较好的反映其特性,在平稳处也表现较为平滑。
在改进DAVAR算法中,D值与窗口长度的变化过程如图3、图4所示。

图3 D值变化过程

图4 窗口长度变化过程
不同窗口长度下对突变信号的跟踪能力如表2所示。

表2 突变位置比较表
由表2可以看出,自适应窗长的改进方法在跟踪信号突变能力上相比短窗口表现较好,且优于长窗口。
通过最小二乘拟合分辨出主要影响陀螺精度的噪声系数。角度随机游走N和零偏不稳定性B在不同窗长下随时间变化的趋势如图5所示。

图5 主要噪声在不同窗口长度的DAVAR分析
由5图可看出:在突变处及时跟踪到了信号的突变,并提高了信号置信水平。
各项噪声系数均值表如表3所示,可以清晰地看出改进的方法表现较好。

表3 噪声系数估计均值
5 结论
在DAVAR算法基础上提出一种基于分形维数调整窗长的改进算法,对陀螺输出数据进行处理。仿真实验结果表明:该方法可较准确的跟踪和描述非平稳信号,以较高的置信度对弹载环境下噪声进行辨识,有利于惯性器件误差的建模与分析,为下一步滤波提供依据。