一种适应于小批量多品种的喷涂工作站的研制与应用
2022-01-08徐友法王卫军杨亚孙海峰
徐友法,王卫军,杨亚,孙海峰
(中国电子科技集团公司第二十一研究所,上海 200233)
近年来,随着喷涂工艺的不断发展和完善,以及喷涂行业人力成本的不断攀升,行业内每时每刻都在寻找新的生产方式,以满足安全、环保、高效、精准的产业发展新要求。在这样的背景下,为顺应生产自动化需求和“机器换人”大趋势[1-2],喷涂机器人系统获得广泛应用,并在推动行业转型升级的过程中迎来快速发展。
工业机器人自动喷涂具有以下明显的优点:
(1) 柔性大,工作范围广[3-4],可与物料输送系统组成柔性制造系统(FMS),实现快速制造。
(2) 喷涂轨迹精确,表面喷涂均匀,重复定位精度高,涂层质量好[5-6]。
(3) 能让工人避开有毒的环境,保护工人的职业健康。
(4) 能显著降低喷涂过程中涂料及辅料的消耗,喷涂作业中所产生的挥发性有机化合物也随之减少,减轻了环境污染。
(5) 操作简便,通过使用机器人示教器能对机器人的动作进行快速设置,喷涂时间短,生产效率高。
现在行业内喷涂主要依靠人工,批量喷涂时效率低、喷涂效果一致性差,而且喷涂出现的油雾对工人的身体健康影响较大。本文设计的喷涂用机器人工作站可实现小批量产品生产的自动化喷涂,具备连续化喷涂、自动换油漆、自动清洗的功能,既提高了生产效率,又降低了工人的劳动强度,并减少了对工人健康的影响。
1 喷涂用防爆机器人
在喷涂过程中易产生易燃易爆的漆雾,因此需要喷涂机器人防爆。喷涂的过程需要对机器人示教。 如果每个点都进行示教一遍,工作量庞大且效果不佳。拖拽示教,即拖动机器人,在运行过程中机器人自动记录下运动轨迹,操作容易,效果较好。因此,既有防爆又有拖拽示教功能的喷涂机器人是本项目的首选。
本文选择了国内某品牌的一款6轴电控机器人(如图1所示),它特别适合木制品、金属件、塑料件的喷涂,具备自我示教与点对点编程的双重功能。就自我示教功能而言,由操作者指定喷涂轨迹,电脑控制系统存储并输出相关动作,重新生成程序。借助程序系统,在自我示教过程中也可以完成多种喷涂功能的控制。
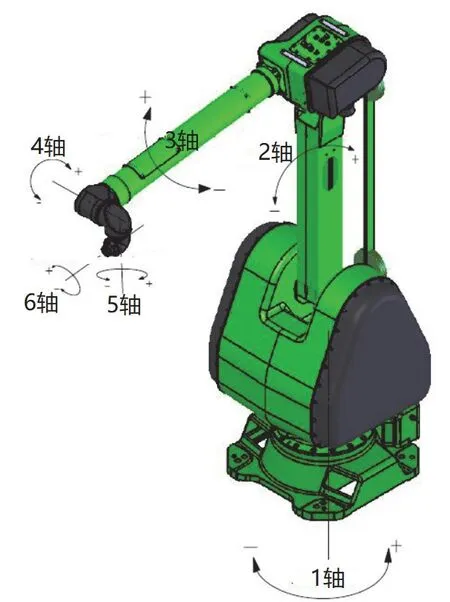
图1 6轴喷涂机器人示意图 Figure 1 Schematic diagram of 6-axis spraying robot
操作工人第一次对机器人示教完成后,以后机器人的喷涂过程就是重复工人的示教过程,保证了产品喷涂效果的一致性问题。因此,工人第一次示教效果的好坏直接决定了以后所有产品的质量。
喷涂工作站中,针对不同的工件,工人需要提前示教好喷涂轨迹,并保存喷涂所需要的工艺参数,包括喷涂流量、喷幅、扇形大小、油漆种类等,并对程序进行命名,其中程序名字和工件类型一一对应。在对工件进行喷涂时,只需找到对应的程序并运行即可。
2 供漆系统
根据喷涂需求,采用如图2所示的供漆系统。4个供漆桶可以提供3种油漆和1种涂胶的自动更换;2个清洗桶装有2种溶剂,分别清洗油漆和涂胶,可以实现管道和喷枪的自动清洗;喷枪可以根据油漆的黏度自动调节扇幅和流量,扇幅调节范围为50 ~ 125 mm,可以在喷涂过程中实时改变喷幅的大小。
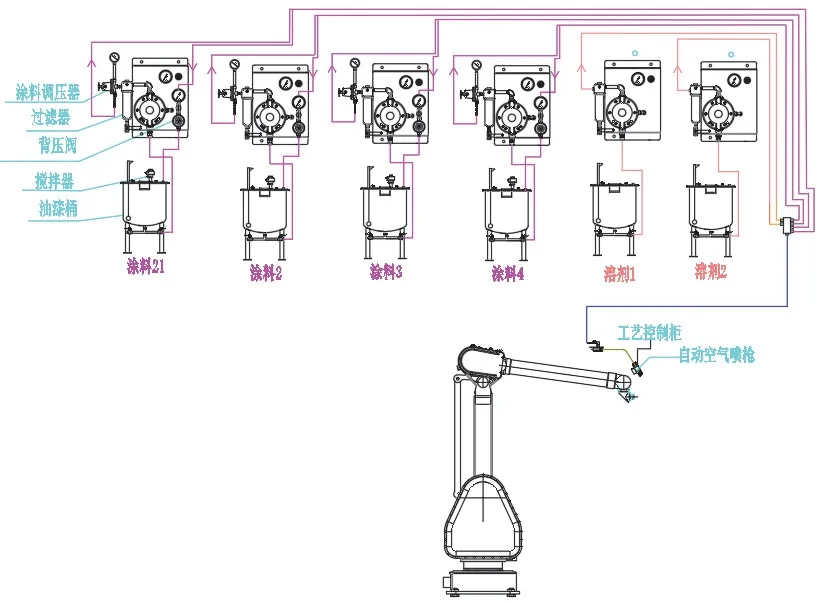
图2 油漆供给系统的组成 Figure 2 Constitution of paint supply system
喷涂系统中油漆的转换和清洗主要通过机器人的IO(输入输出)端口进行控制。通过对不同端口的高低电平的控制,实现油漆换色、清洗、供漆等操作。喷枪配备有喷控系统,通过比例阀校准后输出固定的扇幅、流量、雾化开度,并配合外部机器人匀速移动,可以保证每次喷涂的膜厚和宽度的一致性。
3 喷涂流水线
由于工件类型较多,并且不能全部采用挂钩,论证后选用输送带作为喷涂系统的输送机构。流水线的托盘上面装有通用的夹具接口,针对喷涂工件设计的夹具固定到流水线托盘上,即可实现喷涂工件的固定。当需要喷涂不同工件时,更换工件的夹具即可。
流水线的控制原理如图3所示,双工位设计的上料组件可以实现喷涂的不间断工作:当工位1进行喷涂作业时,工位2将同步地进行下料工作和重新上料工作;当工位1完成喷涂作业时,工位2已经上料完成,喷涂机器人继续对工位2进行喷涂。
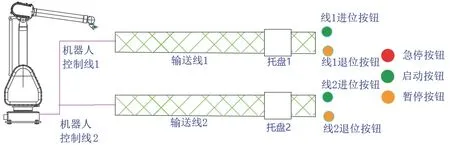
图3 流水线控制原理 Figure 3 Control principle of production line
控制按钮包括进位按钮、退位按钮、启动按钮、暂停按钮和急停按钮,其中进位按钮和退位按钮控制进料组件的上料和退料,启动按钮和暂停按钮控制机器人的喷涂动作,急停按钮则可令整个系统急停。
流水线的进位和退位采用双控制方法,既可以通过进位按钮、退位按钮控制,也可以由机器人单独控制,并且机器人控制会继承按钮控制的结果,按钮控制也会继承机器人控制的结果。
流水线和机器人的交互机制如下:选择工件对应的喷涂程序并运行;当流水线工件上料后,工人按下启动按钮,工件被流水线送到喷涂点;流水线上的传感器检测到产品后发送信号给机器人,机器人开始喷涂;喷涂完一侧后,机器人发送信号给流水线,流水线喷盘旋转180°,机器人开始喷涂另一侧;工件全部喷涂完成后,机器人发送喷涂完成信号给流水线,流水线将产品退出到下料点,由工人下料。机器人的运行和流水线的运行是相互控制的,整个流程如图4所示。
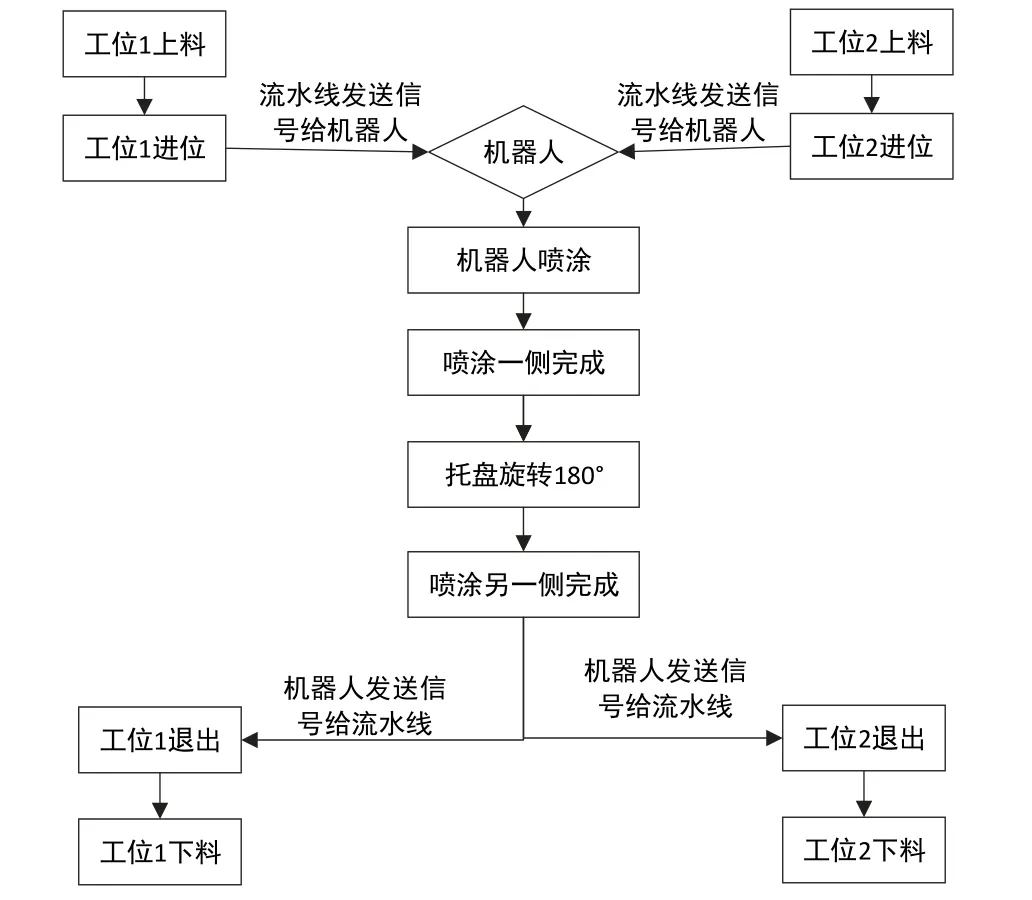
图4 喷涂机器人和流水线的信息交互 Figure 4 Flowchart of information exchange between spraying robot and production line
4 工作站的搭建
整个系统主要由流水线、机器人、喷涂系统和干式喷房四部分组成,如图5所示。流水线分布在机器人两侧,采用不锈钢滑轨,可以实现无抖动快速滑动。2条流水线送工件到不同工位时,机器人只需要调节一下喷涂角度即可进行喷涂。喷涂过程如图6所示。

图5 机器人喷涂工作站的系统结构 Figure 5 Structure of robotic spraying station
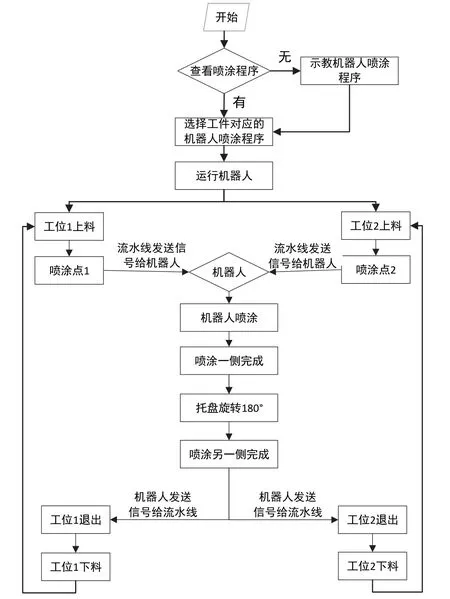
图6 喷涂工作站使用流程图 Figure 6 Flowchart of running of the spraying station
5 实验
根据喷涂工作站的设计,完成了各零部件的设计和选购,搭建了相应的平台,如图7所示。

图7 机器人喷涂工作站现场搭建 Figure 7 Building of the robotic spraying station
电机使用量大,并且目前主要靠人工喷涂,耗费了大量的人力物力。本文以电机定子和外壳的喷涂作为实验对象。某伺服电机定子和外壳的结构如图8所示。
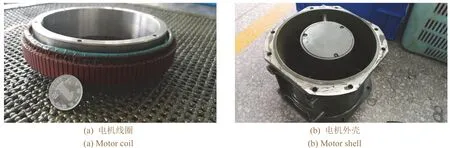
图8 喷涂工件 Figure 8 Workpieces to be sprayed
实验结果显示,本文搭建的电机喷涂工作站中,工人针对不同的工件选择提前设置好的程序后,只需要完成流水线的上料,并按下流水线启动按钮,流水线就会将需要喷涂的电机输送到喷涂点,机器人对工件喷涂后流水线再将工件送到下料点,工人下料。在不更换工件的情况下,工人只需要交替地对左右两条流水线进行上料并按下启动键和下料操作即可,且工人不需要进入喷涂车间。
6 结语
本文根据实际工况和约束条件完成了某电机喷涂工作站的搭建。在实际搭建中,完成了机器人和 流水线的通信交互,实现了油漆供给系统的颜色自动转换和清洗。实验结果表明,本文搭建的喷涂工作站可以在电机喷涂上得到很好的应用,可靠性和生产效率都较高,可以完全替代人工。这为相关的伺服电机企业在生产线的改装换代上提供很好的范例。
