基于负载观测器的永磁同步电机终端滑模控制系统设计
2022-01-08李先弘潘松峰刘镔震王朝阳
李先弘,潘松峰,刘镔震,王朝阳
(青岛大学自动化学院,山东青岛 266071)
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)伺服控制系统是实现工业自动化的必要条件。近年提出的中滑模控制(Sliding Mode Control,SMC)因其对系统参数要求低并且其具有很高的鲁棒性,使得其在PMSM 中有较好的应用前景。为了提高电机的位置控制精度,文献[1-3]通过选取合适的滑模面以及控制律,将滑模控制算法应用到伺服控制系统的位置环和速度环;文献[4-5]采用观测器法,通过将观测器的实时观测值传送到系统控制器中,以此来补偿转矩电流,进而大大提高了系统的响应速度。文献[6]将终端滑模控制应用到伺服系统的三环中,通过仿真验证了系统跟踪精度较高,超调量较小。文献[7]中将负载观测器与滑模控制结合起来,此时的控制系统的动态响应速度有了明显的提高。文献[8]将滑模变结构控制方法与直接转矩控制方法结合,使得系统的动态性能和静态运行性能都得到明显改善。为了有效地提高速度观测器的精度,文献[9-10]将滑模控制应用于PMSM 的调速系统中,其速度跟踪精度大大提高了。文献[11-12]将负载转矩观测器与积分型滑模控制结合起来,使得系统能够有效地跟踪实际负载变化,且在负载变化时滑模控制器能有效维持转速的稳定。
根据上述分析,文中设计了一种基于负载转矩观测器的非奇异快速终端滑模(NFTSMO)控制方法。首先在速度环采用非奇异快速终端滑模控制方法,然后针对负载扰动问题,基于龙伯格[13]状态观测器的原理,设计了一种负载转矩观测器,将负载转矩观测器添加到位置环,以此来实时观测负载转矩变化的功能。该文的这种复合控制方法不仅提高了速度环的稳定性,还能在位置环有瞬时脉冲信号时减小超调量。最后,基于Simulink 仿真验证了该控制策略能够有效地提高位置跟踪精度,避免了出现较大的超调量,负载扰动具有较强的鲁棒性。
1 PMSM数学模型
建立在dq坐标系下的PMSM 数学模型[14-15],其电压方程为:

其中,ud、uq,id、iq,Ld、Lq分别为d、q轴的定子电压、电流、电感。R为定子电阻;ωre为转子电角速度;λ0为永磁体磁链。
此时PMSM 的转矩方程可表示为:

此外,电机的机械运动方程为:

其中,J为转动惯量;ωm为转子机械角速度;TL为负载转矩;Te为电磁转矩;b为电机的阻力系数。
经计算可得:

2 负载转矩观测器设计
选取PMSM 转速和负载转矩为状态变量,状态方程如下:
引入状态反馈误差的微分项,提高其观测速度。如下式:
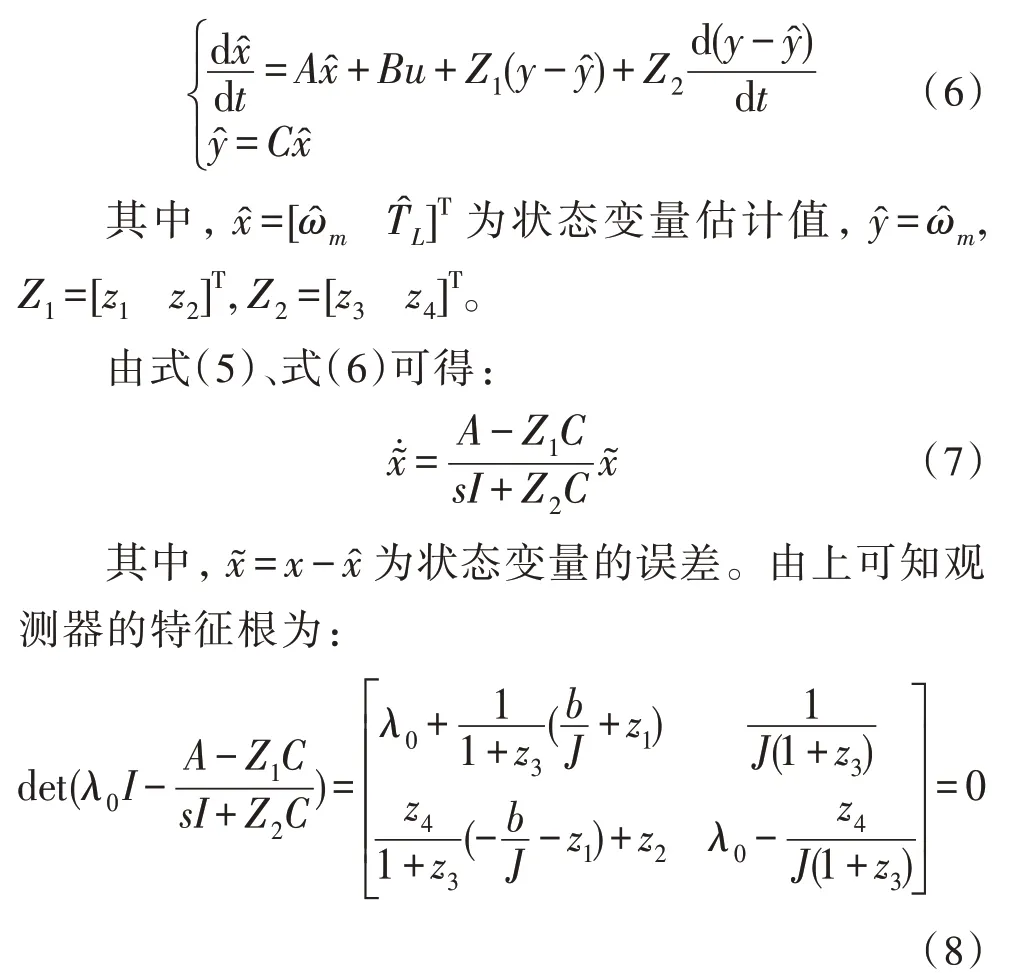
根据期望极点k1和k2,假设b=0,z1=z3=0,则:
将z1、z2、z3、z4代入式(6)得:
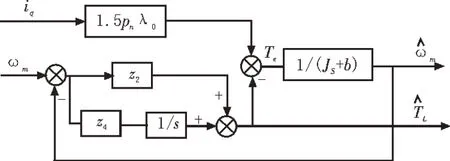
图1 负载转矩观测器结构图
3 非奇异快速终端滑模面选取
3.1 速度环滑模面的选取
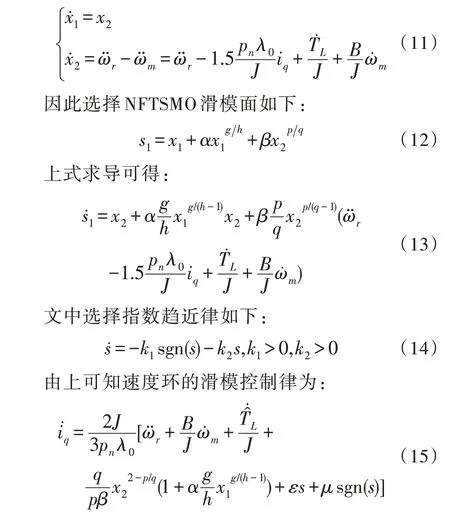
为增强系统对速度波动以及抗负载变化的抑制能力,该文以非奇异快速终端滑模模块来代替传统的PI 控制模块,将其应用于系统的电流环[16]。定义角速度参考值为ωr,并且它二阶可导,此时PMSM 系统的数学模型如下:
3.2 位置环滑模面的选取
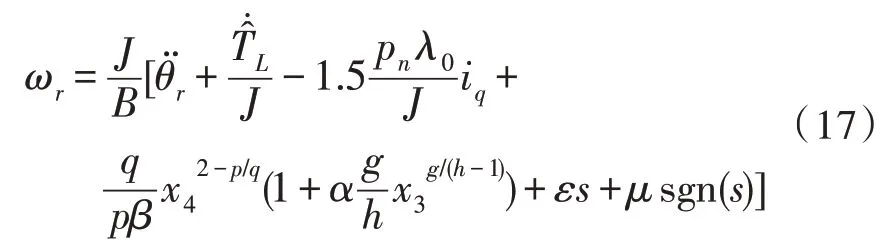
定义位置误差为其输入量,速度参考值为其输出量。现设位置参考值为θr,电机实际位置为θm。有:

经计算可得位置环的滑模控制律为:
3.3 非奇异快速终端滑模控制器稳定性分析
速度环稳定性[17]分析:
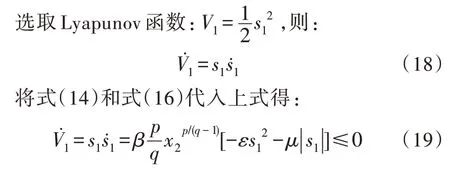
因此,可知文中所设计的滑模控制器稳定。
同理可证位置环滑模控制器稳定。
4 仿真与分析
在MATLAB/Simulink 软件环境中搭建PMSM 模型,取id=0,如图2 所示,将PMSM 伺服系统的速度环和位置环的PI 控制器改为非奇异快速终端滑模(NFTSMO)控制器[18],同时在位置环添加负载转矩观测器,然后对系统进行仿真验证。
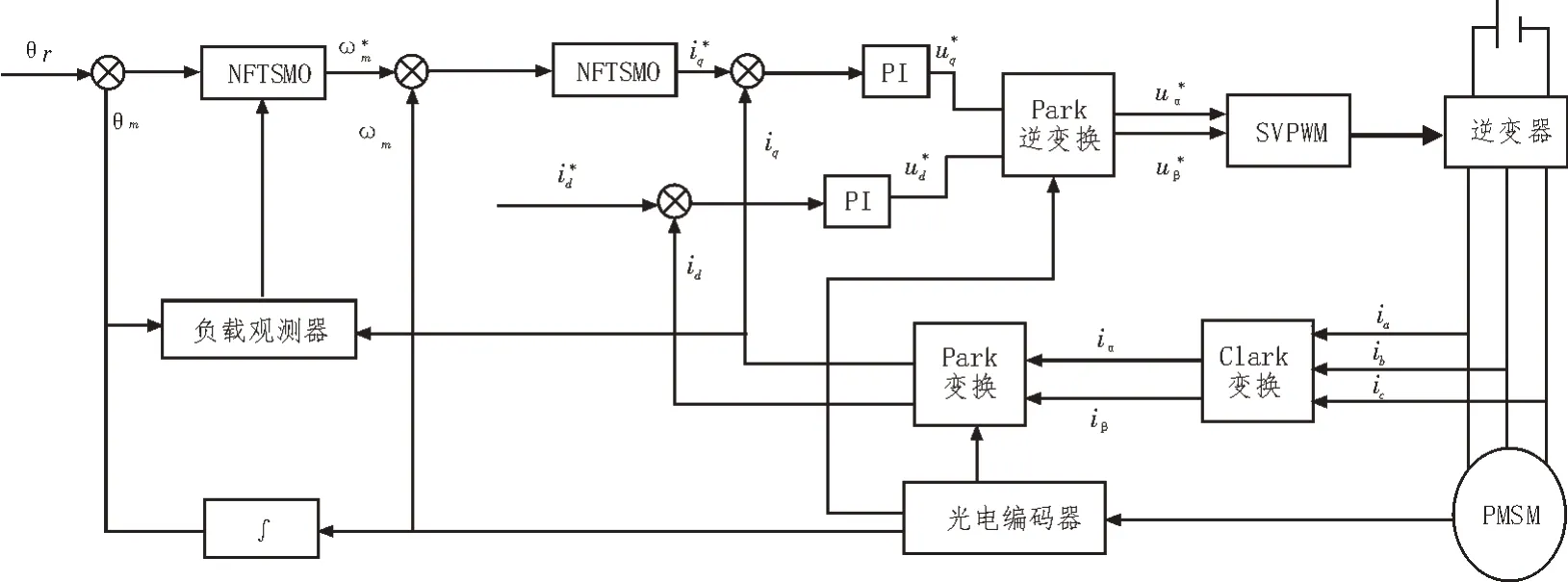
图2 基于负载观测器的PMSM位置伺服系统
该文选用的参数如表1~3 所示。
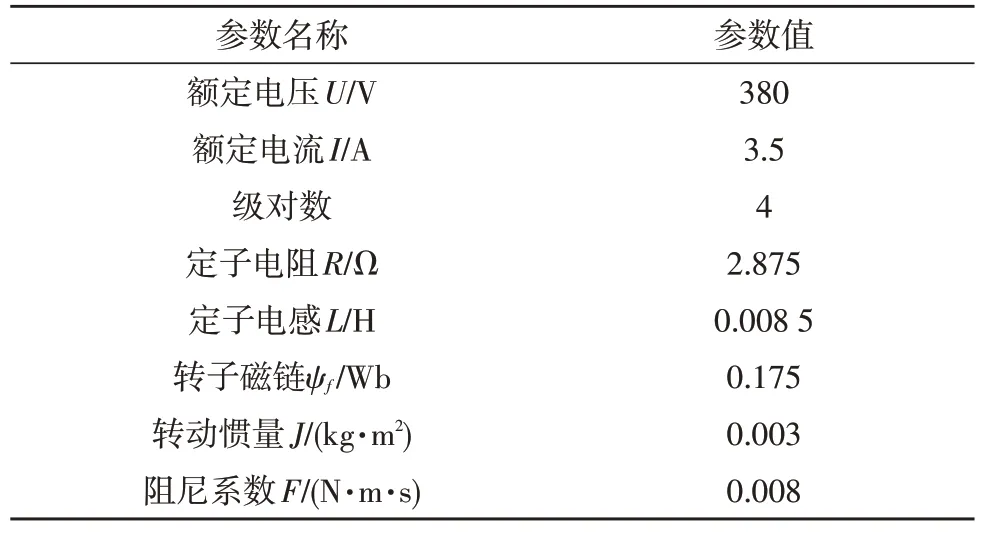
表1 永磁同步电机参数
PI 控制器参数kp=0.14,ki=14。
在仿真实验中,给定系统初始时刻一个存在阶跃的正弦位置信号,对模型进行仿真,如图3~6所示。
图3 为传统三环伺服控制系统位置响应曲线图,可以看出采用传统三环伺服控制系统,位置响应具有较大超调量;图4 为永磁同步电机伺服系统位置曲线图,可以看出位置响应既快速又准确,而且该曲线在到达系统的给定位置之前无超调;图5 为此观测器的负载转矩跟踪图,可以看出观测器能够很快地跟踪负载的变化,并且系统无超调,图6 为该设计的位置响应误差曲线图,可以看出与给定位置的误差很小[18]。从仿真结果可以看出文中所设计的基于负载转矩观测器的非奇异快速终端滑模算法能够快速地跟踪负载的变化,而且大大增加了系统的稳定性。
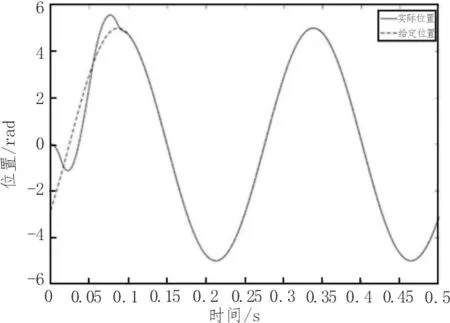
图3 传统三环伺服控制系统位置响应
图4 该文所采用的伺服控制系统位置曲线
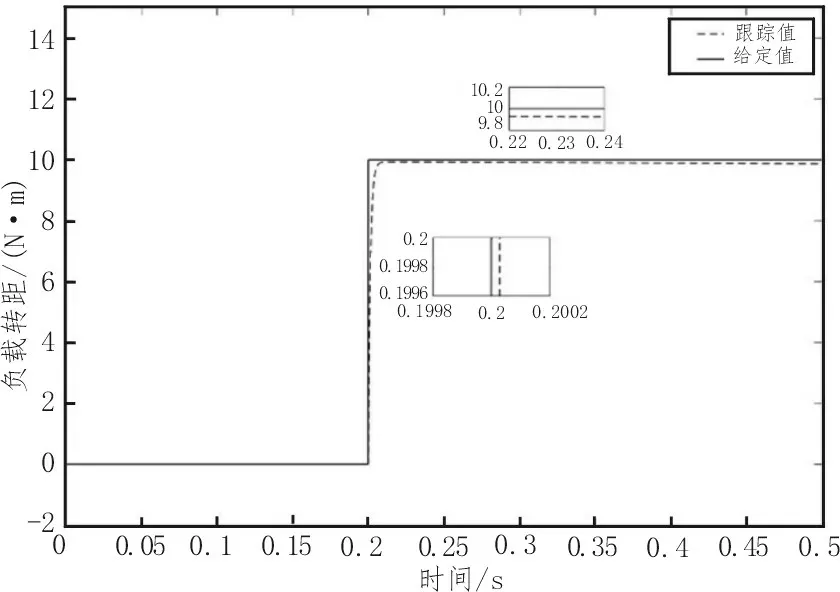
图5 负载转矩跟踪图
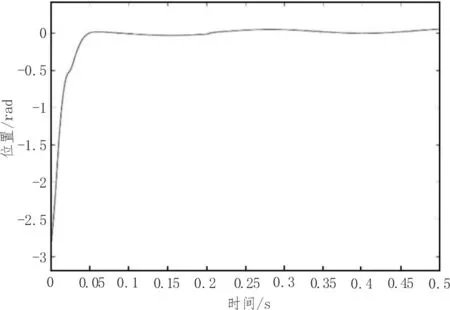
图6 位置响应误差曲线图
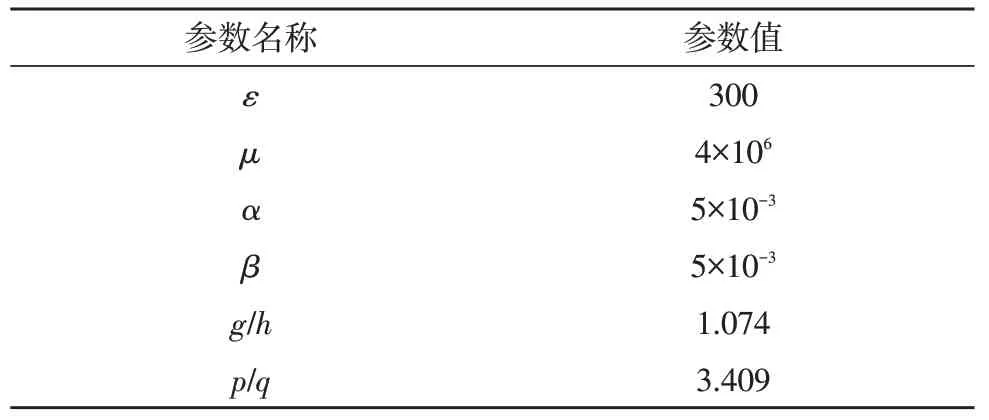
表2 NFTSMO速度控制器参数
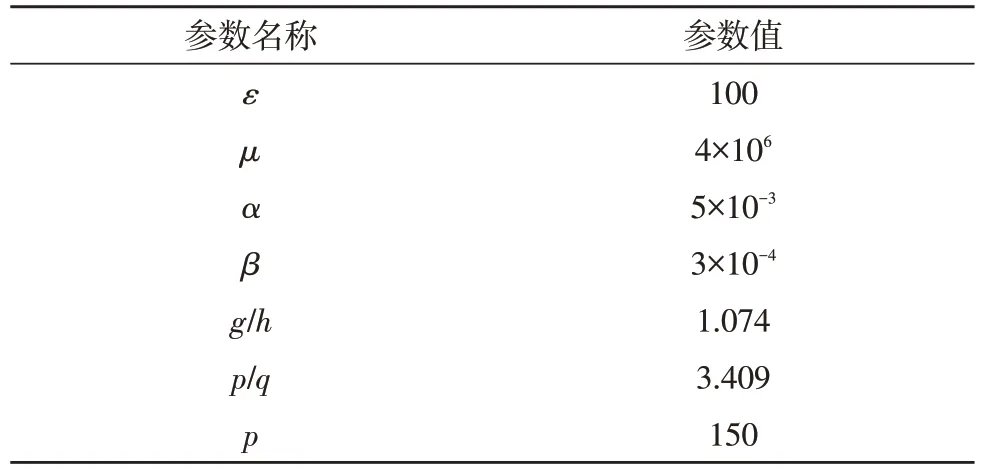
表3 NFTSMO位置控制器参数
5 结束语
该文为解决工业机器人对PMSM 伺服系统位置跟踪精度要求高的问题,设计了一种基于负载转矩观测器的PMSM 非奇异快速终端滑模控制方法,通过对电机伺服系统的速度环和位置环的设计,使得电机的位置跟踪精度以及响应速度都有所提高。仿真验证了该设计的有效性。
