基于模糊控制的三电机伺服控制系统特性研究
2022-01-08孙晓林沈宏亮杨立奎曹新宇
孙晓林,沈宏亮,杨立奎,曹新宇
(1.国网雄安新区供电公司,河北雄安新区 071600;2.国网河北省电力有限公司,河北石家庄 050000;3.国网河北电科院,河北石家庄 050000)
伺服系统技术已经成熟,其应用范围已遍及各行各业,该系统的运动控制是重要的研究方向[1]。伺服系统、伺服驱动器和伺服电机都有一定的国家或工业标准。但由于伺服系统的广泛应用,绩效指标多种多样,不同应用对绩效指标的要求各不相同,为伺服系统性能测量和评估工作带来了一定困难[2]。因此,有必要制定一套完整评价标准和测试方法,这对三电机伺服控制系统性能进行研究具有重要意义。
在采用正弦脉宽调制脉冲方法实现恒转矩等步长角细分驱动器时,感应器可以直接或间接检测转子位置或速度(或负荷)。根据位置反馈和给定的对比指令,对位置或速度进行闭环控制,比较输出产生一个驱动脉冲序列,完成三电机伺服控制系统特性的研究。尽管这种方法可以应用于许多研究中,但是其结果受电机非线性特性影响,导致特性研究结果准确性不高。为了提高伺服控制精度,提出了一种基于模糊控制的三电机伺服控制系统。
1 模糊控制工作原理
在控制领域中,智能控制取得了良好效果。基于专家经验和实际经验,模糊控制是一种模糊推理、模糊语言和模糊集合理论的现代智能控制方法,该控制算法成本低、使用方便,在电流控制领域具有较高应用价值[3]。在模糊控制方面,根据专家长期积累经验,针对具体情况,制定相应模糊控制规则,通过模糊思维推理实现控制方法转换,利用模糊集原理和模糊思想,将控制策略转化为数学函数,最终用计算机控制方法进行计算和调整[4]。
传统PID 控制方法基于控制系统的动态特性及其非线性、时变因素,无法满足永磁电机高精度控制的要求。针对这一问题,提出矢量变换控制和模糊控制,并建立了相应的控制系统[5-7]。与现代智能控制中的模糊控制方法相比,PID 3 个参数可实时在线调节,提高系统的工作能力和稳定性,便于在需要10 kV带电作业的场景中使用[8-9]。三电机伺服系统模糊控制工作原理如图1 所示。
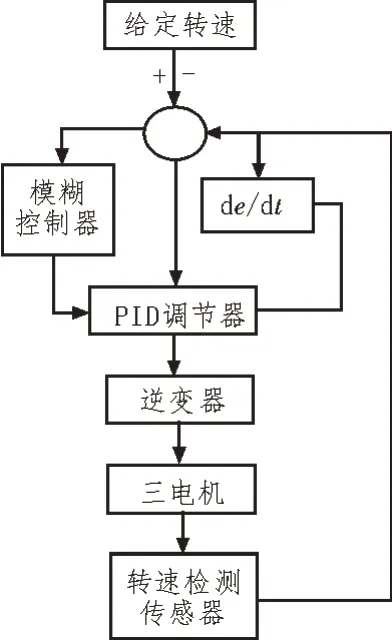
图1 三电机伺服系统模糊控制工作原理
通过转速检测传感器实时检测脉冲,并将其与给定转速相比,得出速度偏差变化率ec,输入误差e和ec为模糊控制器参数,然后输出3 个PID 参数:kp、kj和kd[10-11]。查询规则表得到相应的kp、kj和kd参数,并将PID 参数输入PID 控制器之中,即:
按照模糊规则实时输出不同的PID 参数,这些模糊规则来自专家经验和实际经验,其性能决定了整个控制系统的精度。
2 三电机伺服控制系统特性研究
2.1 转矩脉动特性研究
三电机伺服控制系统具有反电动势为梯形波,即定子和转子之间的互感为非正弦的特性[12]。在三相伺服控制系统中,将三相方程转化为dq方程是一个难题。由于dq方程适用于气隙磁场,其为正弦分布的电机,若以级数形式表示电感,可采用多参考坐标理论,但计算繁琐;若只采用基波变换,则计算结果误差较大[13-14]。采用电机初始相变量直接建立数学模型比较方便[15]。三电机伺服控制系统特征为:
1)定子线圈为60°相位,为中心全螺距的线圈,采用星形符号连接。
2)不考虑齿槽效应,定子内表面光滑,绕组均匀。
3)忽略饱和、涡流、磁滞损失。
4)气隙磁场分布近似为矩形波,平顶宽度为120°,没有考虑电枢反应。
5)转子上无阻尼绕组,永磁无阻尼作用。
三电机伺服控制系统方波电流和梯形波反电动势变化如图2 所示。

图2 三电机伺服控制系统方波电流和梯形波反电动势
若获得恒定电磁力矩,必须要有方波电流,反电势是梯形波,而方波电流大约是120 度/半周[16]。由于定子只有两相导电,所以电磁力为:

式中,ia、ib、ic分别表示三电机供电方波电流;ea、eb、ec分别表示三电机梯形波反电动势。
调速可通过调节电源电压和定子电流实现,转矩控制可通过调整电枢电流实现。三电机伺服控制系统中的恒转矩主要由基磁链与基电流相互作用产生,高次谐波间产生的恒转矩可以忽略,各次谐波通量连接与电流之间无脉动。但在实际电机中,由于电机电感会限制电流的变化,所以,定子绕组输入电流不能是矩形波,反电动势与理想波形的偏差较大,此外,非理想磁链波形还会影响到转矩脉动的大小。在理想的120°范围内,磁链波的水平波峰将产生转矩波动;当磁链波的水平波顶大于120°时,电流仍是120°的方波,不会产生脉动转矩。
2.2 控制系统动态特性研究
在控制系统的动态特性时,需要完成电机定子电流的克拉克变换,即三相(a-b-c)静止坐标系到两相(α-β)静止坐标系电流转换过程,变换关系如下:
式中,ia和ib均为三电机伺服控制系统相电流。
在变换结果支持下,将两相(α-β)静止坐标系转换到(d-q)旋转坐标系,Park 变换结果为:
式中,id和iq为(d-q)旋转坐标系中的电流。
为了继续作Park 逆变换,需处理经过三电机伺服控制系统中的电流环控制器电压ud、uq:
式中,θe表示电角度。在此基础上,结合流量反馈控制换相转矩脉动,消除换相过程中的高速转矩脉动。
3 仿真实验
3.1 实验环境
以10 kV 带电作业用绝缘斗臂车为例,其主要结构包括拼接爬梯、绝缘支撑工作斗、底部支撑。安装梯采用整体成型工艺,梯长2 m,支撑绝缘的工作斗采用伞形结构和伺服电缸驱动,如图3 所示。
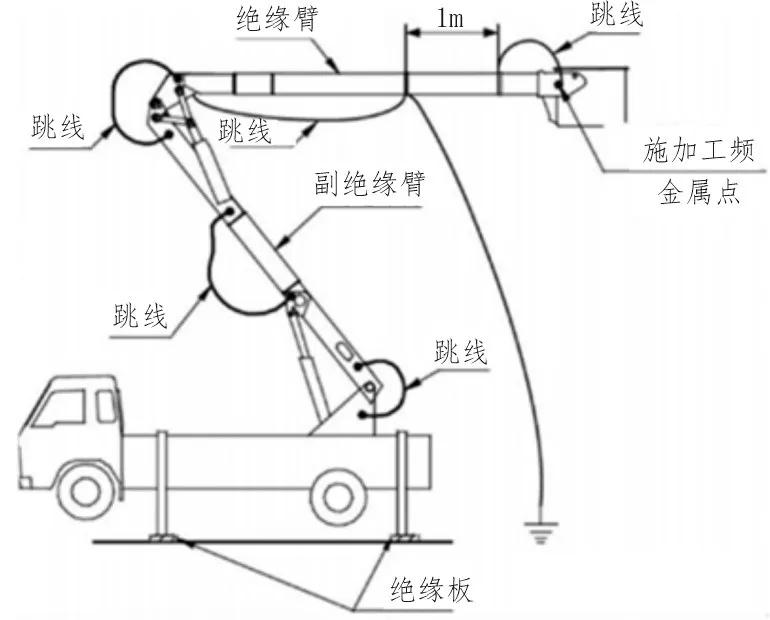
图3 10 kV带电作业用绝缘斗臂车
环境温度应大于-25 ℃,且小于45 ℃,相对湿度不低于80%。施工过程中,应满足GB/T9465 结构安全系数要求。10 kV 带点作业用绝缘斗臂车应标明有效绝缘长度,且有效绝缘长度不得小于1.0 m,并应在基臂上设置绝缘段。工作斗应有倾斜角度指示装置,在设备容易观察到的地方,当达到倾斜极限时,应设置声光报警信号,在这种情况下,沉降不得超过平台最大高度的0.3%。
3.2 实验参数
主要实验参数如表1 所示。
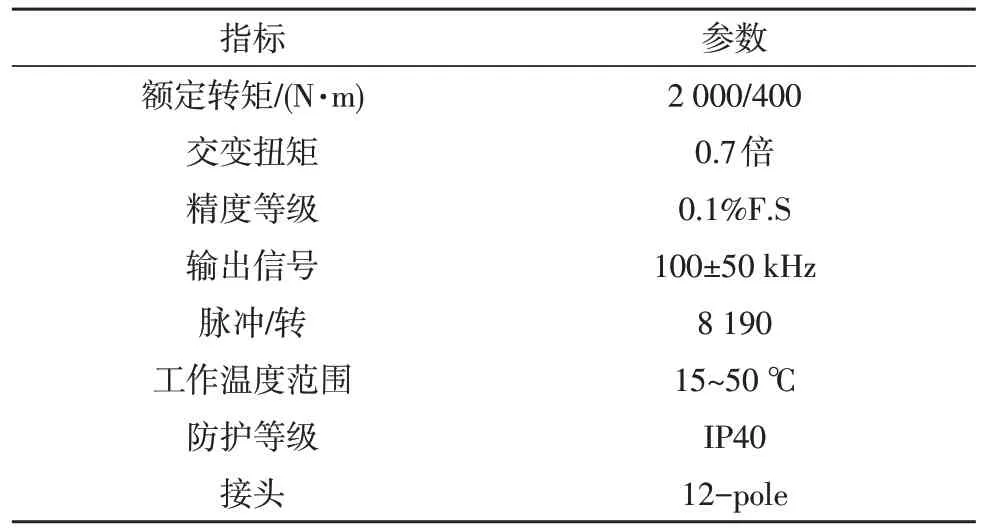
表1 转矩传感器主要实验参数
3.3 实验结果分析
分别使用正弦脉宽调制特性研究方式和基于模糊控制系统特性研究方式对三电机伺服控制系统脉冲波形展开分析,结果如图4 所示。

图4 不同方法下三电机伺服控制系统脉冲波形对比分析
由图4 可知,使用正弦脉宽调制特性研究方式在转速为300 r/min 时,脉冲波形超过-225.00~225.00 V 范围,且在-525.00~525.00 V 范围内波动。在转速为2 000 r/min 时,脉冲波形超过-6.250 0~6.2500 V 范围,且在-8.250 0~8.2500 V 范围内波动;使用基于模糊控制系统特性研究方式在转速为300 r/min 和2 000 r/min 时,脉冲波形在-225.00~225.00 V 范围和-6.250 0~6.250 0 V 范围内波动,由此可知,使用该方法特性研究结果与实际结果一致。
使用两种方法分析两个转速下增加负载后电机转速变化情况,如表2、3 所示。
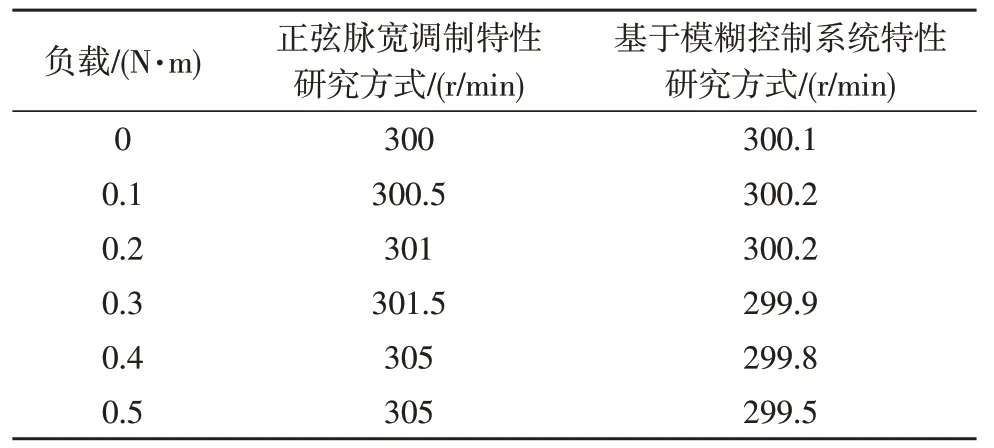
表2 300 r/min电机转速变化两种方法统计表
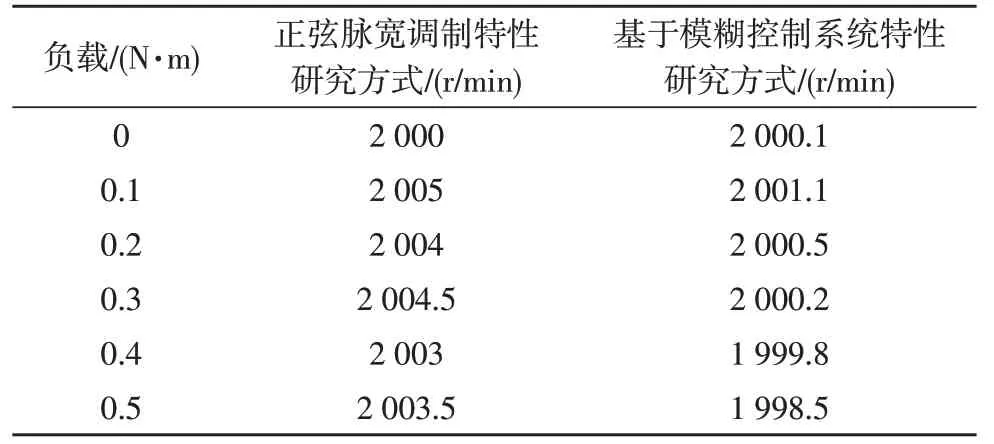
表3 2 000 r/min电机转速变化两种方法统计表
由表2、3 可知,基于模糊控制系统特性研究方式与实际数值存在误差,误差为0.1 r/min,而使用正弦脉宽调制特性研究方式与实际数值相差较大,最大误差为5.5 r/min,由此可知,使用正弦脉宽调制特性研究方式系统特性研究结果精准度较高。
4 结束语
采用模糊控制技术完成了三电机伺服控制系统中伺服电机性能及系统特性的测试,实验效率高,自动化程度高,操作简单,维护方便。通过建立伺服电机及系统性能测试平台,为科学管理、质量检测提供了有力保障,这对提高伺服电机和系统产品质量具有重要意义。仿真实验结果表明,该方法具有较高精准度。
