基于深度学习的水轮发电机定转子缺陷智能诊断技术研究
2022-01-08高建国胡平良夏海军
李 诚,高建国,胡平良,夏海军,何 亮,胡 勉
(湖北白莲河抽水蓄能有限公司水电分公司,湖北黄冈 438200)
水电能源清洁、环保、可再生,是新能源发电的重要发电形式[1]。作为电能的主要生产设备,水电机组的安全、稳定、可靠运行直接关系到电站能否向电网稳定、经济地提供可靠的电力[2]。水电机组故障经常会引发安全事故,例如宜昌葛洲坝水电站因水导轴承安装存在偏差,导致水导摆度越限,影响机组运行[3];丽水紧水滩水电站因偏离设计工况运行导致尾水管低频涡带脉动,引发了剧烈的机组振动[4];俄罗斯萨杨-舒申斯克水电站于2009 年超负荷运行,最终造成75 人遇难、10 台机组完全损坏的严重后果[5]。传统水电站发电机组运维容易错过机组缺陷处理的最佳时间[6],目前比较好的维护模式是依据机组运行状态,合理制定状态监测、故障诊断和状态趋势预测的水电机组维修策略[7],从对故障的被动响应转变为主动预防,避免维修不足或过度维修的问题。
近年来,人工智能技术不断发展,其中深度学习[8]智能技术在各行各业应用广泛,比如可用于振动信号的提取[9]。金棋等利用优化的栈式降噪自编码器提取齿轮箱特征进行故障诊断[10];谢吉鹏等将深度信念网络用于高速列车振动信号特征提取及故障诊断[11];张朝林等采用卷积神经网络方法提取轴承振动信号,采用小波包分频带构建特征向量,实现轴承故障诊断[12]。而研究表明,单一的故障诊断策略不利于获得智能诊断的准确度,会增加诊断的困难程度[13-16]。
1 理论基础
1.1 深度学习模型
机械设备故障智能分类的深度学习模型以人工神经网络、支持向量机等为代表,获得了长远的发展,极限学习机是一种现代智能模拟专家决策识别的深度学习模型。其参数权值的选取基于MP 广义逆,具备较好的泛化特性。隐含层中的参数通过随机的方式获取,不需要多次迭代。图1 为极限学习机的结构原理。
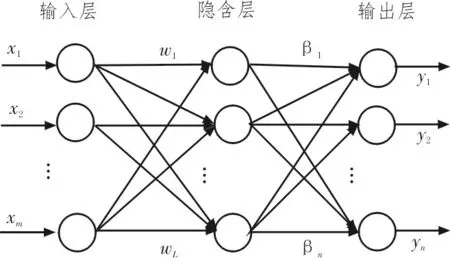
图1 极限学习机的结构原理图
计算方法如下:
当确定深度学习的样本集(xi,yi)后,其中xi∈Rn,yi∈R,则极限学习机的模型计算公式为:
其中,N是隐含层中节点的数量,G是激励的表达函数,βi表示β中的任意元素,是第i个隐含层节点对输出神经元的权值;H是隐含层的输出;bi是第i个隐含层节点的偏置。
1.2 状态评价
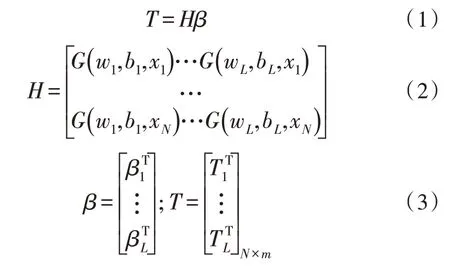
状态评价采用类比的评价标准,首先对同一机组出厂后不同时期各项参数监测数值进行比对,其次考虑多台同样型号的机组在统一相同的运行工况下各项参数监测信息的比对[17],通过这种类比比对的方式有效获取当前考察机组的运行状态。
该方法本质上是通过机组的健康状态与当前状态的相似度分析来进行距离估算,从而完成状态评价的。距离估算有诸多方法,其中欧氏几何距离比较直观,如下所示:

式(4)为通过欧氏几何法计算相似度距离的度量公式,由此最终建立的类比评价流程,如图2所示。
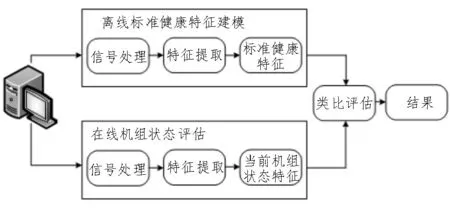
图2 类比评估方法计算流程
因为类比评估的标准是与不同时期下该机组的历史参数数据或同一时期下相同型号和运行工况的机组的对比,因此可以避开难以量化的缺陷状态,全面有效地评估待测机组,且该方法适用于多种电力设备。
2 特征提取和深度学习算法
2.1 超广角可见光摄像探头
水轮发电机定转子缺陷智能诊断系统的关键分析数据均来自于可见光探头,探头的选择和安装位置不能影响水电机组的稳定运行,还要能够适应恶劣的工作环境。
水轮发电机内狭小,为了准确、有效地观测定转子运行状态,包括潜在的裂纹和抖动,探头需安装于水电机组的内部。设计选用高清和高帧率的超广角可见光探头,同时每台摄像机需自带红外补光器来匹配整个过程的曝光一致性。定制超广角可见光探头要考虑振动、高温、观测位置等多个因素。
设计在水轮发电机组内的冷风道周围安装4 台适合该场景应用的超广角高清摄像头,通过图像拼接技术,将整个定转子拼接成立体展现视图,实现对全部定转子的现场实时监控。此外还要在水电站的集电环和电刷装置附近装备红外相机,对电气连接部位进行实时的温度监测及诊断。
2.2 缺陷图像识别处理
1)摄像机镜头畸变校正技术
通过高清超广角摄像头实时监视水轮发电机的定转子运行状态,采用图像拼接技术获得最终的分析图后,还要考虑摄像机镜头的畸变问题。首先需要获取准确的镜头畸变校正参数,通常相机镜头会随着观察点与中心位置的增大,成像畸变程度逐渐增大,越靠近图像中心时,直线的弯曲越小。因此对于弯曲测度指标函数的构造,离图像中心不同距离的直线应赋以不同的权重,利用目标函数计算最终的畸变参数,通过计算过程的优化提高畸变标定的精度。同时,利用实际实验获取数据及时调整畸变矫正系数。
2)基于SIFT 特征图像配准算法
SIFT 算法又被称为尺度不变特征变化,通过确定图像上的一个或多个特征点,在不同的尺度空间下以此特征点为参照,记录空间变化。其目的是达到图像的抗畸变,准确地反映特征点在监测中的位置。
3)多探头图像智能拼接技术
通过多探头图像智能拼接技术拼接安装于水电机组内部多个探头的画面,营造拼接后的在线监测查看体验,为后续的全息化维修保养奠定技术基础。图像拼接在实际的应用较为广泛,该算法选用SURF 进行图像拼接,包括特征点提取和匹配、图像配准、图像拷贝、图像融合(去裂缝处理),部分源代码如下:
2.3 发电机定转子缺陷特征提取
水轮发电机组转子一般按裂纹形状进行分类。通过简化模型模拟转子裂纹,发现裂纹将引起机组振动产生奇次谐波、偶次谐波以及高频成分。在有转子裂纹缺陷的情况下,从启停机和带负荷运行的过程中分析水电机组的振动特征。发现裂纹会使机组的振动缓慢增大,波形畸变;振动信号中会出现偶次谐波,甚至是高频成分;转子轴心的运动轨迹随着裂纹缺陷的严重程度逐渐发展趋向双椭圆或不规则形状,转子低速旋转时晃度增大明显,后期甚至还会引起热弯曲[18]。根据不同运行状态下的情况,搜集对应的转子裂痕的可见光图像集,包括从开始出现到比较严重等多个阶段的图像。
积累定转子常见缺陷所对应的图像及特征数据,才能对采集到的图像进行智能诊断,这一过程涵盖了数据积累、诊断算法的提出和实现。
2.4 深度学习算法
实际工程中,需要分析历史数据中的转子结构异常情况,包括裂痕的大小、裂痕扩展的速度、振动偏转的角度大小等,根据这些历史参数及时调整深度学习模型。
深度学习算法步骤如下:
1)将前期获取的训练用转子缺陷可见光图进行统一的特征归一化操作,得到预处理后的训练集;
2)通过VGG 网络提取所述预处理图中的待测缺陷特征;
3)保存深度网络的瓶颈特征:输入训练样本集合和测试样本集合,提取全连接层之前的输出,即获得瓶颈特征,并使用优化器训练瓶颈特征;
4)网络优化:进行全局优化训练,得到待测物体(输入图像是否包含转子裂痕、结构异常等)的网络模型,获得输入图像为异常的概率阈值;
5)利用所述待测物体网络模型,输入或读取待识别图像,获得待识别图中为异常的概率。若待检测图像为异常的概率高于所述概率阈值,则对应的转子异常,需要输出警报信号。
3 智能诊断系统构建
基于深度学习的发电机组定转子缺陷智能诊断技术的关键是要研究深度学习智能检测及匹配技术、训练裂纹、振动、脱落样本及规则库建立等,积累水轮发电机组定转子缺陷数据,构建基于深度学习的智能诊断策略,同时需要及时调整算法来适应少训练集带来的挑战。图3 是诊断策略流程图。
实现的方法包括在水电站发电机定转子内部安装定制镜头后的可见光相机,并利用构建的网络系统实现多相机对定转子的实时监控系统。获取特征图像后,通过具有深度学习机制的裂纹、脱落、振动偏移等缺陷智能监测算法服务器,按照诊断规则、模型规则等综合经验数据作为基础,对常见定转子故障类型进行有效的在线故障分析,为水电机组安全运行提供保障。服务器应具备图片在线播放、历史回放、拼接后立体展现等功能,确保电站水电机组设备运行过程的可视化。
在故障诊断系统中,所有安装于发电机内部的相机均通过千兆路由接入到算法及应用服务器中。通过网络实时查看设备内部监控视频,同时服务器具备实时图像处理、拼接和计算功能,而客户端则负责查看实时的相关信息。
4 智能诊断效果验证
针对湖北白莲水库水电机组发电机定转子运行状态的实时在线监控数据,对水电机组转子裂纹、脱落和振动等异常现象智能诊断分析提示算法进行验证。定转子缺陷诊断图像处理流程如图4 所示。
图4 定转子缺陷诊断图像处理流程
基于深度学习的发电机定转子缺陷诊断图像处理过程为:
1)图像预处理:建立原始图像的灰度提取和骨架提取;
2)建立裂纹、振动、脱落模型,并提取特征(包括裂纹大小、周长、面积、基于图像对齐的振动幅度阈值、光滑表面脱落模型快速特征等);
3)通过超广角摄像头记录缺陷类型,并输入到学习库、丰富库。
系统实现所采用的技术路线拓扑连接图如图5所示。
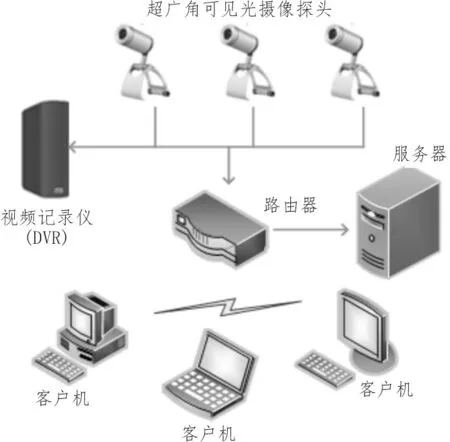
图5 系统连接拓扑图
图6 所示为湖北白莲水库水电机组发电机缺陷智能诊断系统识别捕捉到的转子上裂纹示意图。图中展示了原始图像和经过系统预处理、特征标记以及最后提取特征点的图像处理过程,从而证明该系统能够有效实现水轮发电机定转子缺陷智能诊断。

图6 裂纹缺陷图像智能识别图
5 结束语
文中基于ELM 深度学习和类比状态评价的理论基础,采用放置在水电机组内部的超广角可见光探头,结合全景红外补光灯外设,对水电机组定转子裂纹、振动、脱落等缺陷进行特征识别收集,并建立缺陷样本和规则库,最终实现了水轮发电机定转子缺陷的智能诊断。经验证,其可以有效诊断相应的故障缺陷。置于机组内部的超广角摄像头加上图像智能拼接技术,可以全方位检测水电机组定转子状态,通过服务器实时图像处理、拼接和计算,在实现智能诊断缺陷的同时,通过网络的连接,客户机还提供相关信息实时查看的功能。
