基于FMI的航空发动机非线性预测广义最小方差控制
2022-01-07王继强王修奇
牛 伟 ,王继强 ,王修奇
(1.中国航空工业集团公司西安航空计算技术研究所,西安 710068;2.南京航空航天大学能源与动力学院,南京 210016;3.江苏省航空动力系统重点实验室,南京 210016)
0 引言
现代航空发动机的控制系统研发是一个十分复杂的系统工程。一方面,该系统是一个涉及诸多学科的复杂系统,在传统控制系统的全数字仿真研发阶段,对各部件的设计多采用各专业独立设计的方式,导致各子系统部件模型无法集成在一个平台上进行系统级仿真,造成难以解决航空发动机控制系统多学科、跨平台、高精度的全数字仿真问题;另一方面,航空发动机也是一个高度复杂的热机械系统,本质上是一个非线性特性很强的对象。从控制的角度来讲,航空发动机控制是一种多变量、非线性、带约束的最优控制[1]。
对于实现航空发动机控制联合仿真,可以考虑应用功能模拟接口[2](Functional Mock-up Interface,FMI)标准,可以有效扩展模型的交互性和通用性,该标准目前已发展到了成熟的2.0 版本[3],且得到了广泛的应用。Nouidui 等[4]在建筑能耗模拟引擎中导入功能模拟单元(Functional Mock-up Unit,FMU)模型,实现了房屋能耗模拟方面的联合仿真;Nicolai[5]在汽车发动机设计领域提出了一种基于FMI 标准的分布式发动机控制系统与热力学模型及其周围网络的联合仿真方法;黄志勇[6]利用Simulink、VS、SCADE 等工具分别对各子系统进行建模,将Simulink模型、C代码以及SCADE 等其他格式模型封装成FMU 模型,设计和开发了基于FMI的无人机多源导航系统仿真平台,实现了系统级的联合仿真。对于航空发动机控制问题,往往基于部件级模型分别选取不同的稳态点通过拟合法或者小扰动法得到分段线性状态空间模型,并在此模型基础上进行线性控制方法设计,但这种方法不适用于航空发动机全包线控制器设计。Richalet等[7-8]于20 世纪70 年代末最早提出了预测控制,解决了工业应用中的许多问题。非线性广义预测控制作为非线性领域的后起之秀,其主要优势在于能够解决带非解析模块对象的控制问题。Grimble 等[9]在非线性广义最小方差的基础上,结合预测控制理论发展出了非线性预测广义最小方差[10]控制和非线性广义方差滤波器[11],能够有效解决航空发动机控制中的跟踪、时滞和抗干扰问题等。
本文介绍了航空发动机控制系统研发中的2 种难题并给出解决方法,介绍并实现了非线性预测广义方差方法在航空发动机中的应用,并通过仿真验证该方法的可行性及优越性。
1 发动机及燃油计量装置的建模及联合仿真
本文建立的航空发动机模型为某型大涵道比涡扇发动机部件级模型,如图1所示。从图中可见,在发动机工作过程中,气流按照从左到右的顺序依次流过发动机各部件,当气流经过某个部件时,遵循热力学原理及容积动力学原理计算出气流经过该部件的特性,按照顺序就可以建立起所有部件的特性方程,当这些部件共同工作时必然满足质量流量平衡、功率平衡等条件,基于该原理即可建立航空发动机部件级模型[12]。
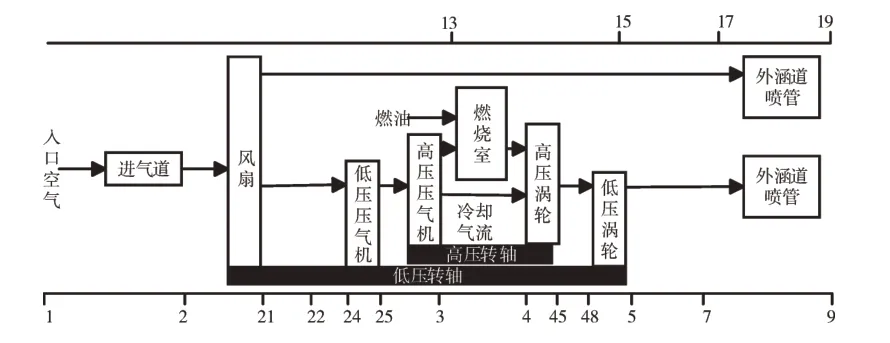
图1 某型大涵道比涡扇发动机模型
本文建立的燃油计量装置主要包括步进电机、等压差活门、计量活门、油泵等部件,如图2(a)所示。燃油经燃油泵进入计量活门,而计量活门的前后压差由等压差活门确定,该压差值可以通过调整弹簧的预紧力设定,压差不变时,通过计量活门的燃油流量便仅与其开度成正比,计量活门的开度经传感器反馈给控制器,由控制器根据需求位移与反馈实际位移计算出控制电流驱动步进电机,使得需求位移与反馈实际位移误差为0,实现对燃油量的闭环控制。在AMESim 仿真平台中根据以上原理建立该数控燃油计量装置,如图2(b)所示。
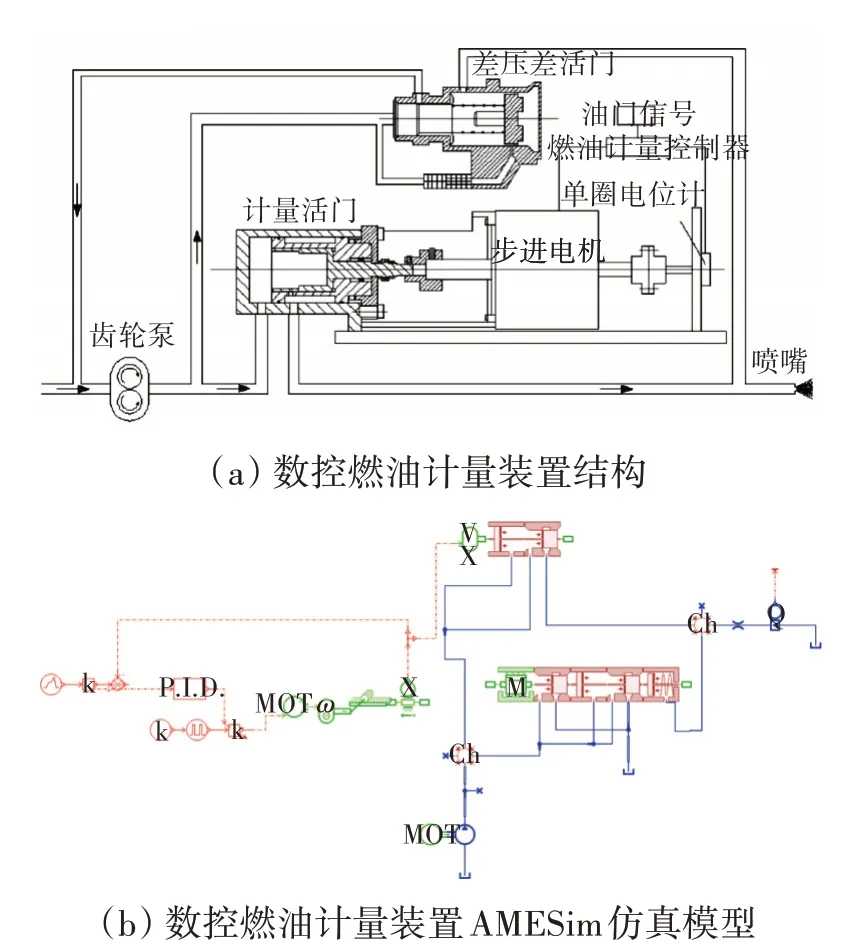
图2 带步进电机的数控燃油计量装置
FMI标准定义了一种联合仿真的通用接口规范,基于该规范建立的模型组件被称为FMU,如图3 所示。一般情况下,支持FMI标准的仿真工具可以将已在本平台建立好的模型转换成FMU。在仿真过程中,主控程序可以通过FMI标准提供的接口调用从属程序(FMU)并交换数据,从而完成不同仿真平台所建模型的联合仿真。本文航空发动机模型基于Matlab/Simulink 平台,数控燃油计量装置模型基于AMESim 平台,本文采用Simulink 作为主控程序,将在AMESim 平台上建立的燃油计量装置模型通过FMI标准导入到主控程序中实现联合仿真。

图3 FMU结构及变量
2 NPGMV方法简介及设计
非线性预测广义最小方差控制(Nonlinear Predictive Generalized Minimum Variance,NPGMV)的基本控制框架如图4 所示。下面结合已发表的相关文献简要介绍NPGMV控制器的设计方法。
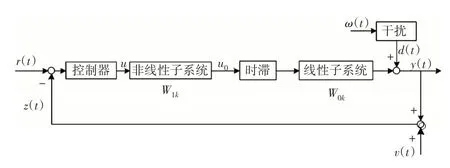
图4 非线性预测广义最小方差控制系统结构
上文所建立的航空发动机和燃油计量装置的联合仿真模型即为图中的W1k,显然

式中:u0为所建联合仿真模型的输入。
图中的线性子系统W0k在航空发动机控制系统中可认为是传感器部件,该带时滞的线性子系统和干扰模型可合并表述为状态空间方程的形式

式中:k为时滞大小;ξ(t)为零均值、单位方差的白噪声信号;y为控制系统输出;A、B、C、D为状态空间矩阵。
基于文献[13],本文选取的需要优化的广义最小方差类型的性能指标为

式中:Pc为性能权重;Fc为控制权重。
传统的广义预测控制的性能指标通常选择为

式中:E{·}为期望值;N为预测步长;Nu为控制步长;λj为控制信号权重。
式(4)可进一步表述为

使控制信号U0的导数为0,从而得到最优控制率为
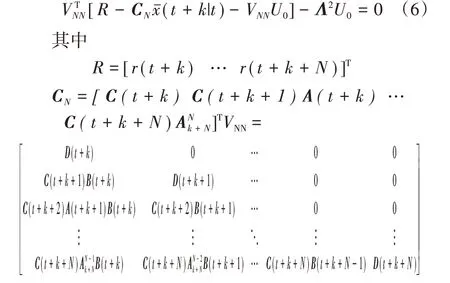

式中:Φ=PcNΨ+Fc0NU0。
从图4 中可见u(t)是系统的实际控制信号,那么基于式(3)可得

式中:ζck为时滞的控制权重。
则相应的信号未来值为

式中:N为控制器的预测步长。
可以通过调整ζck来消除输入非线性环节对系统带来的影响。如果系统动态为非线性时,由式(9)得到最优控制信号为


联合式(10)~式(13)得到最优控制律为

根据式(14)整理得到2种不同表达形式的最优控制信号

为了实现滚动优化,对控制律方程作进一步变形。在式(16)的等号两边同时左乘CI0=[I0 … 0 ],可写为


式中:Uf为系统未来的控制信号,可以表示成W1k(N-1)Uf=[W1ku(t+1) …W1ku(t+N) ]。
最终整理得到最优控制信号为

3 航空发动机广义预测控制仿真
根据第3 章中设计控制器的方法进行仿真,得到控制器结构如图5 所示。其中,设置饱和函数是为了限制控制变量的范围,这是基于实际航空发动机物理特性的考虑,以燃油流量为例,其值显然要始终保持在某一合理的范围之内。
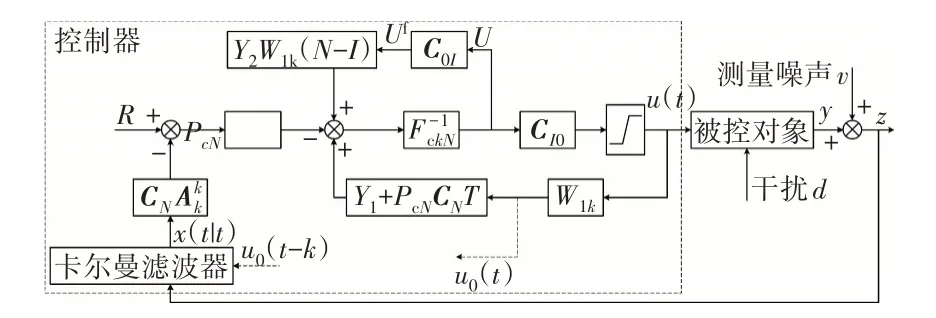
图5 控制器结构
在上文推导出的最优控制律中可见,可调节的参数一共有3 个:FckN、-Λ2和N,下面简要分析一下如何选取这3个参数的值[15]。
(1)FckN的选取。在某种程度上,FckN决定了最优控制律的性能,所以如何选取FckN在广义预测控制领域是比较慎重也是比较困难的。依据文献[14],首先对上文中建立的联合仿真模型进行PID 控制设计,并使得PID控制器满足控制性能要求,此时便得到PID的控制参数CPID(z-1),使FckN=CPID(z-1)即确定了FckN的值。
(2)Λ2的选取。Λ2代表性能指标中每个控制变量的权重大小:当每个元素的权重值都选择较小时,说明此时性能指标认为误差对控制性能的影响较大,所以更加重视误差,不考虑控制代价的影响;反之,说明此时性能指标更加重视控制代价。通常选择Λ2=λ·diag(a,b,c),本文选取a、b、c分别为1、1、0.6,那么此时Λ2值便只由λ的取值惟一确定,下文将通过仿真说明λ的取值对系统控制的影响。
(3)N的选取。N为预测步长,其数值决定了非线性子系统模块数,其值的选择将在下文中给出仿真评估。
结合上述分析,在进行最优控制器设计时,需要确定λ和N这2 个参数的值,所以本文对这2 个参数进行仿真评估。
首先确定λ的值,研究不同N值控制器对系统的控制效果,仿真结果如图6 所示。就本文N的取值范围来看,N越小,系统阻尼越大,响应时间越长;N越大,系统阻尼越小,超调量越大。如果只考虑系统的动态性能,就尽量选取较大的N值,但是N取值越大,计算量就越大。
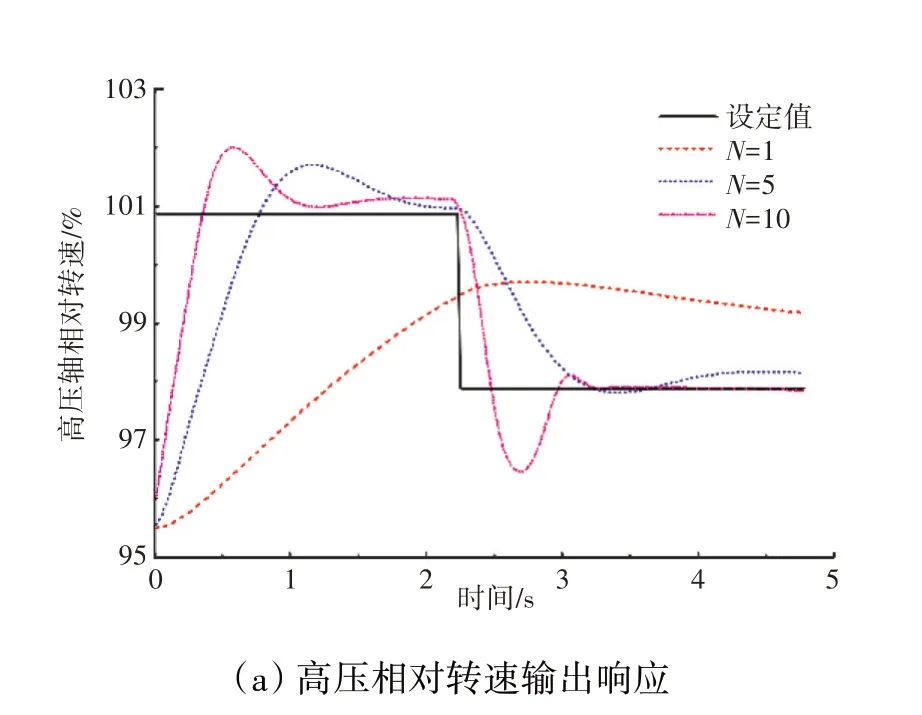
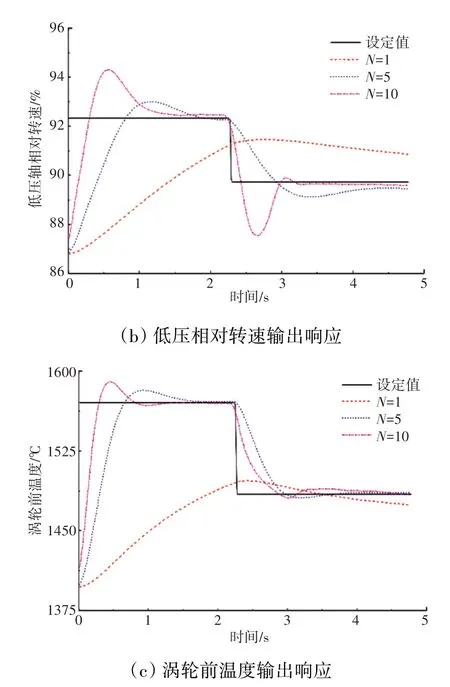
图6 不同N值时的系统输出响应
然后,再选择1个确定的N值,研究不同λ值对控制性能的影响。为了减少计算量,设定N=1,改变λ值,得到不同λ值下的仿真结果,如图7所示。从图中可见,在相同条件下,λ值越小,系统阻尼越小,响应越快,超调量越大;λ值越大,系统阻尼越大,响应越慢。如果在不考虑N值对控制性能的影响和在可接受超调量范围内的条件下,λ取值越小越好。

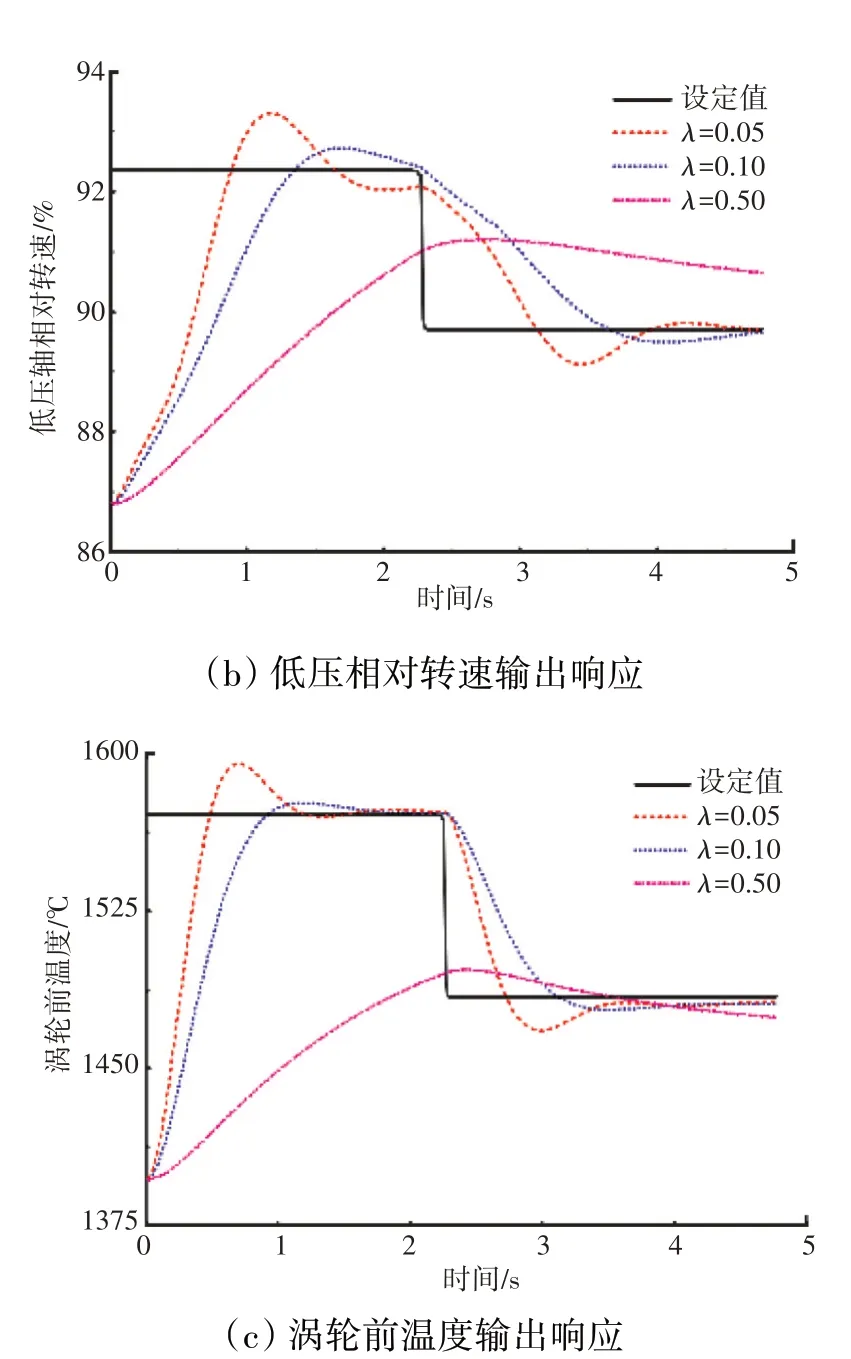
图7 不同λ值时的系统输出响应
根据上文仿真分析可见一个不能忽略的事实,即:减小λ值和增大N值作为获得较好动态性能的2个手段,会使得控制量变化更加剧烈以及发生超调,这会增大执行机构的压力,而且在实际过程中执行机构肯定存在一个反应时间,导致其变化无法达到控制器计算出的控制量变化的要求;同时,执行机构的作动范围也存在极限。这些问题都约束着λ和N的取值。所以,在实际工程中,往往是对整个系统进行综合评估后才能确定λ和N值。考虑到本文主要做最优控制器的仿真研究,所以暂时忽略考虑执行机构的延时问题,并划定控制量的变化范围。最后,选取λ=0.08,N=7,将NPGMV 控制器与PID 控制器的控制效果进行对比,仿真结果如图8、9所示。
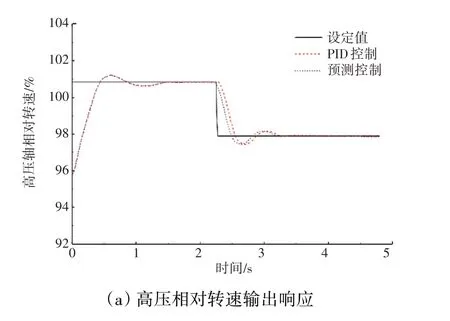

图8 PID与广义预测控制效果
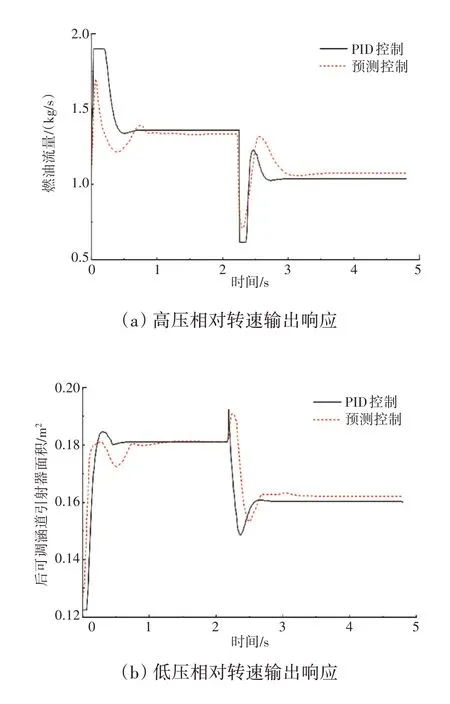
从图8 中可见,对于本文选取的发动机3 个参数来看,在对系统动态性能的影响方面,PID 控制相较于NPGMV 控制来说响应较快,但超调量也更大。一般来说,如果控制策略使得被控系统的动态性能越好,那么系统付出的控制代价也会越大。从图9 中可见,相较于PID 控制,NPGMV 控制的3 个控制变量变化明显更加平缓,幅值更小,无疑缓解了执行机构的作动压力。以本文所建立的数控燃油计量装置执行机构为例,其计量活门和等压差活门的结构中都存在弹簧,而显然高频率高幅值的作动会严重降低其动态性能和弹性品质,甚至改变其弹性刚度或者弹簧预紧力,导致执行机构不能供给航空发动机相应的燃油流量,从而降低航空发动机性能,而当弹性刚度或者弹簧预紧力改变超过某一极限时,会造成执行机构的硬故障,而如果此时飞机处于飞行状态时,其后果不可估量。
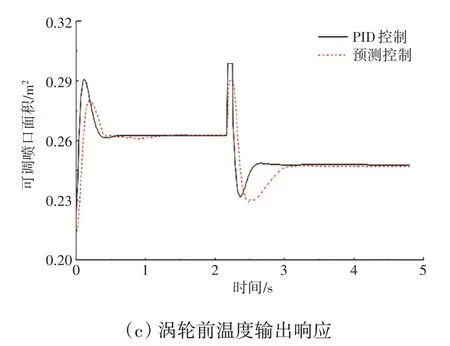
图9 2种控制器的控制量
综上,本文提出的基于非线性预测广义最小方差控制,在仿真过程中没有出现系统不稳定现象,很好地解决了控制器的稳定性问题,这主要得益于基于系统PID 控制器参数的设计方法;同时,具有解决非解析模块系统控制问题的能力,能在略微降低控制品质的条件下减小控制变量的量级并且缓解了执行机构的作动压力,延长了执行机构的使用寿命。
4 结束语
通过本文对非线性预测广义最小方差控制算法在航空发动机机中的仿真来看,该控制律的设计具有设计简单、调试方便的优点,且计算量小,考虑了时滞问题等,可以满足航空发动机对控制器实时性的控制要求,是一种有效的控制策略,具有良好的工业应用前景。