智能附着升降脚手架施工技术研究
2022-01-07张哲文罗勇宋满荣
张哲文,罗勇,宋满荣
(1.合肥工业大学土木与水利工程学院,安徽 合肥 230009;2.中铁四局集团建筑工程有限公司,安徽 合肥 230022)
1 引言
随着我国社会经济水平的快速提升,城市化进程不断加快,城市人口也迅速膨胀,为满足城市发展需求,现代意义上的高层建筑逐渐开始普及。高层建筑的出现也带动施工技术的发展进步,脚手架就是技术进步的典型代表。脚手架作为一种重要的施工器械,可保证高处作业安全和施工的顺利开展,其发展主要经历三个阶段,第一阶段是传统竹木脚手架,第二阶段是钢管脚手架,第三阶段则是升降脚手架,也被称为“爬架”。升降脚手架相比传统的钢管脚手架具有结构稳定、防护性好、施工效率高等优势,随着计算机技术逐渐应用于在工程建设领域之中,性能更加完善的智能附着升降脚手架开始出现。
2 工程概况
中铁四局集团有限公司承建的郑州航空港河东四棚户区一标项目位于郑州市航空港区三官庙乡教场袁村附近,距新郑国际机场约10km,总建筑面积82.95万m²,包含1#~5#五个独立地块。项目主要由27栋高层住宅楼组成,楼栋总层数为22~28层不等,结构单体楼层高度均为2.8m,地基采用粘结性较好的CFG桩复合地基,基础结构为筏板基础,主体结构则为钢筋混凝土剪力墙结构。本工程对标准化施工要求较高,且楼栋外立面沿垂直方向较为统一,适宜采用智能附着升降脚手架开展施工作业。
3 技术特点
①智能附着升降脚手架引入实时监测系统和远程控制系统,有效预防架体升降或正常作业过程中因超载或失载而产生的安全事故,确保工程施工安全。
②智能附着升降脚手架采用工厂预制化生产,其系统以及构件分为若干模块,现场将所有模块组装成一个整体,施工结束可再拆分为各个模块,安装拆除简单快捷,实现了模块化施工。
③智能附着升降脚手架采用定型化整体式防护,用冲压钢板网代替传统密目网,用型钢代替钢管,架体防护严密,结构强度高,抗冲击能力强。
④智能附着升降脚手架可实现稳定同步升降,克服传统脚手架搭建复杂、钢材使用量大等缺陷,不仅节约成本,还能提高施工效率。
4 施工工艺及操作要点
4.1 机位设计及施工设备协调
4.1.1 机位设计
智能附着升降脚手架平面布置需考虑经济性与安全性的统一,设计时依据现有图纸的标高,可结合BIM技术建模,在整合建筑预埋管线的同时确定外墙预留洞口位置。为保证流水施工的顺利进行,需将整个架体进行合理的划分,原则是确保划分后的架体能够与施工流水段相对应。不仅如此,架体分片也需要考虑工作量的平衡,即每个分片架体设置的机位数量基本保持一致,防止某一分段出现机位数量过多或者过少现象,影响架体提升稳定性。
4.1.2 施工设备协调
机位设计前要依据主楼工程结构图纸并确定塔吊、人货电梯位置。首先要保证塔吊附墙连接杆件不会干扰架体提升构件及竖向龙骨,为消除隐患,在塔吊附墙杆件处,架体安装有可活动的特殊龙骨板,此处位置的龙骨板之间通常使用转角连接角钢进行固定,当架体上升时,塔吊附墙杆件会对龙骨板产生干扰,此时可松开角钢一侧的连接螺栓,将可活动的龙骨板整个抬起,当架体通过后再将龙骨板放回。施工电梯一般安装在架体下部位置,为防止两种设备冲突,电梯导轨会低于架体一层,当架体到顶后,拆除部分架体使施工电梯通顶。转料平台设计时应注意荷载传递,在架体处于静止状态时,平台需将材料荷载直接传递到主体结构而避免爬架承力,在架体提升时,平台能脱离主体结构和架体共同提升。
4.2 临时支撑平台搭建
根据高层建筑智能附着升降脚手架的设计要求,架体的组装应从第二层(标准层)就开始,为确保架体安装稳定,需要在架体底部设置临时支撑平台,可根据架体规格采用悬挑杆或者落地脚手架,落地脚手架一般为外双排脚手架,结构如图1所示。当主体工程施工至标准层后,将双排落地脚手架作为找平架用于组装智能附着升降脚手架,找平架在附墙支座安装时需承担部分架体荷载,因此要放置在坚实基础上,为提高平台稳定性,还应设置连墙杆与主体结构拉结。

图1 临时外双排脚手架搭设立面图
4.3 架体组装
组装架体的第一步是按平面布置尺寸放置龙骨板,再选择专用的节点板将龙骨板连接并紧固,如图2所示,再按要求在龙骨板之上组装架体的竖龙骨,同时还得用斜杆将竖龙骨与龙骨板进行固定,如图3所示。
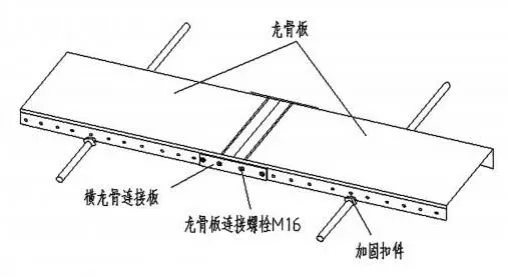
图2 龙骨板安装示意图
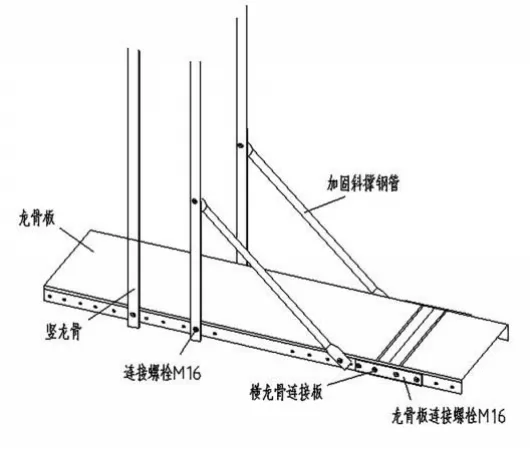
图3 竖龙骨安装示意图
第二步首先是参照第一步继续组装第二层的龙骨板,再安装刚性构件和下承重梁,如图4所示。最后是安装冲压钢板防护网,如图5所示。
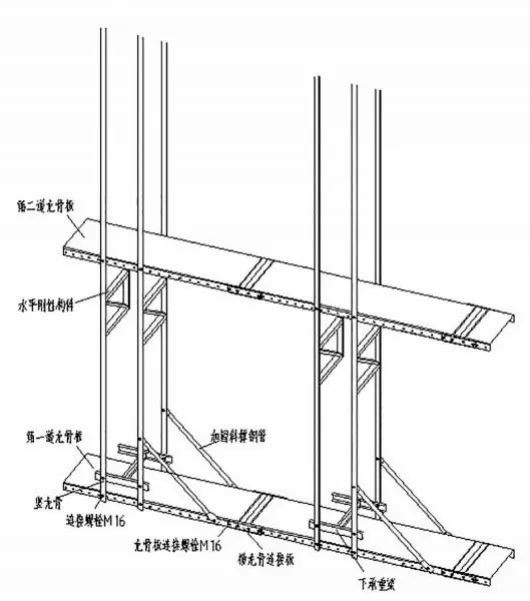
图4 刚性构件、下承重梁安装示意图

图5 冲压钢板网安装示意图
4.4 附着支撑及升降系统安装
附着支撑及升降系统主要由附墙支座、荷载控制器、动力装置、防倾覆附着导轨、导轮等构件组成。附墙支座分为两种,一种用于导向防坠,一种用于提升架体,安装前需对建筑物预埋处混凝土强度进行检验,确定强度达到设计要求,方可安装。支座采用穿墙螺杆与主体结构固定,其中心线应与架体导轨及预埋孔洞的中心线保持一致,水平偏差应控制在30mm以内,安装时应对附墙支座进行调平并确保与导轨垂直。荷载控制器上方吊挂在上承重梁上,下方与电动葫芦吊钩相连接。升降动力装置选用环链电动葫芦,链条的上吊钩承挂在荷载控制器上,下吊钩则承挂在下承重梁。
防倾覆附着导轨通常设置在架体主框架的立柱之上,安装顺序是先在主框架安装刚性支架,再通过螺栓将导轨的连接板与主框架上的连接板相连。导轮与用于导向的附墙支座共同组装成架体导向构件,再通过穿墙螺栓将导向构件与主体结构相连。架体升降过程中,导轨与架体平台共同沿导轮滑动,实现对架体的导向控制和防倾覆效果,整个系统的荷载传递路径是先将由架体传递至附墙支座,再由附墙支座转传至建筑主体结构。
4.5 智能控制系统
附着升降脚手架智能控制系统主要由智能总控、重力传感器、控制电缆、通讯电缆、智能分控制柜等部件组成,总、分控制柜及微机控制界面如图6、图7所示。控制系统使用计算机做上位机,即发出操控命令的计算机,再以一组主控制柜、多组分控制柜以及荷载传感器组成智能监测系统,通过通讯电缆将计算机以及各个控制柜连接成整体,保证上位机能够对系统中各分控的荷载开展全流程的监测及控制。

图6 主、分控箱示意图

图7 微机控制界面
整套系统可以开展25路信号的监测工作,计算机对各通道传输回来的标定数值进行动态显示及实时储存,施工过程中,当一路或者多路通道荷载达到报警阀值时,系统主控器继电器工作(常开变常闭)启动中间继电器切断主控回路,各系统立即停止运行并开启报警,根据不同的故障工况,还将采取不同的报警方式,方便工作人员快速排查,有效保证智能附着升降脚手架运行的准确安全。
4.6 架体提升流程
智能附着升降脚手架的提升主要依靠架体提升装置、控制装置、防坠支顶装置等协作运行实现。标准层主体结构工程施工时,在建筑结构的四周会均匀布置架体提升装置,提升钢丝绳一端与坐落于结构梁板上的用于提升的附墙支座相连,一端穿过架体底座的滑轮电动葫芦底部挂钩相连,电动葫芦则安装在架体主框架的提升梁上,通过动滑轮原理实现架体依靠附墙支座的上下相对运动。控制装置在架体提升过程中进行实时监测,一旦出现触电、振动、过载以及变形量预警,控制系统立即介入,主控机继电器输出开关信号切断主控回路,爬升过程立即停止。防坠落支顶装置设计为简单可靠的摆针式结构,当架体提升时,装置的重心与销孔将位于不同的竖向直线上,且防坠支顶装置斜撑杆会由于自身重力而偏向架体导轨,并自然搭接在轨道横杆上,因此不会影响架体的提升。当架体上升过程发生意外而下坠时,防坠落装置的撑杆会立刻抵住升降架的轨道横杆,而防坠装置本身通过穿墙螺栓固定于主体结构,使得架体最终停止坠落。
架体的防坠装置与提升装置应采用不同附墙支座分开设置,两者互不干扰,各自承受架体荷载并将荷载直接传递给建筑物的主体结构,这样做的目的是当一个装置功能突然发生故障时,其他装置的功能仍可正常发挥功效,可充分保证升降脚手架的施工安全。
4.7 架体拆除
智能附着升降脚手架采用分单元的方式吊装拆除,按照预先分配好的单元,拆除单元之间的连接件,之后再安装塔吊吊具,当塔吊勾住吊具后,再对吊挂钢丝绳进行预警,为防止架体在拆除后出现摇摆晃动,待塔吊预紧完成后,再拆除附墙支座,随后将单元整体吊至地面,在地面将此单元拆除并分类堆码好,重复以上工作直至所有单元拆除完毕。
5 结语
项目实施过程中采用的智能附着升降脚手架克服传统升降脚手架存在的安装复杂、升降不稳定,无法同步升降、缺乏预警系统等问题,不仅可以保证工程质量和施工进度,还有效提高施工安全水平。智能附着升降脚手架施工技术在该项目的成功应用对提高我国高层建筑施工技术水平,增加国家在相关建设领域的技术储备,具有十分重要的现实意义。
