用于车辆的自适应移动配重装置的设计
2022-01-06赵文瑞孟泽江马舒君
赵文瑞 孟泽江 马舒君


摘要: 为了解决车辆在弯道中姿态侧倾,稳定性下降的问题。设计了一种用于车辆的自适应移动配重装置,安装于车体上,通过自主改变车辆重心位置,保证车辆的行驶姿态,提高车辆的弯道性能。对实验用车进行了建模,设计了配重系统及自适应控制系统,利用有限元校核了车辆在各工况下的强度,并进行实车验证,证明该装置对车辆弯道性能有提升。该装置提供了一种结构简单经济性好的车辆重心改变方案,为车辆弯道性能的提升提供了一种思路。
Abstract: In order to solve the problem of vehicle's attitude tilting in the corner, the stability is reduced. An adaptive mobile counterweight device for vehicles is designed, which is mounted on the body, and the vehicle's bend performance is improved by autonomously changing the vehicle's center of gravity position, ensuring the vehicle's driving attitude. The experimental vehicle is modeled, the counterweight system and adaptive control system are designed, the strength of the vehicle under various operating conditions is verified by finite meta-check, and the real vehicle verification is carried out, which proves that the device has improved the performance of the vehicle bend. The device provides a simple and economical vehicle center of gravity change scheme, which provides a way of thinking for improving the performance of vehicle bends.
关键词: 车辆弯道;配重;自适应移动;赛车
Key words: vehicle curve;counterweight;adaptive movement;racing
中图分类号:U472.43 文献标识码:A 文章编号:1674-957X(2022)01-0019-03
0 引言
转向时由于惯性力,车辆稳定性下降,为增强车辆弯道稳定性,现有方法主有增加悬架刚度、非对称车辆调整,以及车辆重心位置的改变等。本文介绍了一种通过车辆重心位置的改变来增强弯道稳定性的装置。
为解决横向稳定杆不能提供抗俯仰的问题,提高赛车性能以及操作稳定性,李雨轩等人结合轮胎数据与整车参数设计确定悬架硬点,通过Adams对该悬架进行仿真分析验证,设计了能有效抑制赛车在制动时的点头行为的第三弹簧装置。高宁等人利用ANSYS分析设计了一种FSAE赛车的横向稳定杆系统,在满足防侧倾需求的前提下对稳定杆实现轻量化。瞿育文等人针对含时滞反馈控制的主动悬架的减振问题,对车辆主动悬架振动控制进行了研究,使车辆行驶舒适、稳定性得到进一步提高。邓召文等人基于CFD方法对比分析了3种不同参数的尾翼组合方案的气动特性,确定了最优的尾翼组合方案,根据最优方案的尾翼参数对前翼的参数进行了匹配,设计了FSAE赛车空气动力学套件,有效提高了车辆过弯速度,推迟了刹车点,提高了圈速,有效提高了赛车的操纵稳定性和动力性。许梦洁等人对儿童赛车加装移动配重提高其防侧倾性能,对配重在车辆中的应用提供参考。
综上所述,目前相关稳定性技术亦能够基本满足生产需求,但是存在结构复杂、价格昂贵,维护不变等问题,研究提出一种用于车辆的自适应移动配重装置,对实验用车进行建模,设计配重系统及自适应控制系统,利用有限元的方法校核了车辆在各工况下的强度,并进行了实车验证,证明该装置的有效性。
1 总体方案和工作原理
1.1 总体方案
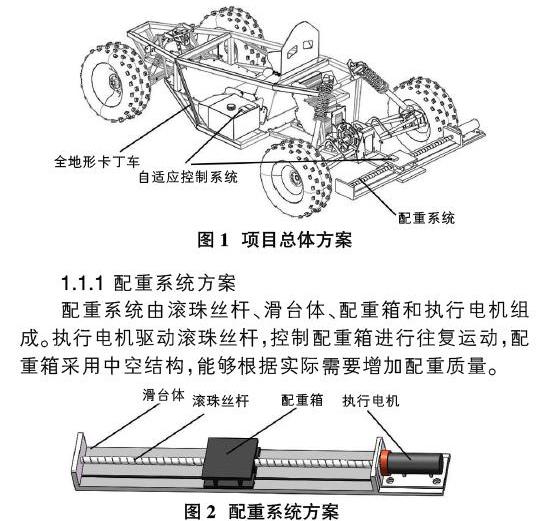
装置由配重系统、自适应控制系统及全地形卡丁车组成。结构如图1所示,配重系统利用螺栓安装在焊接于车架的安装台上,自适应控制系统(包括控制器、角度传感器、位置传感器)利用螺栓安装在车身上。
1.1.1 配重系统方案
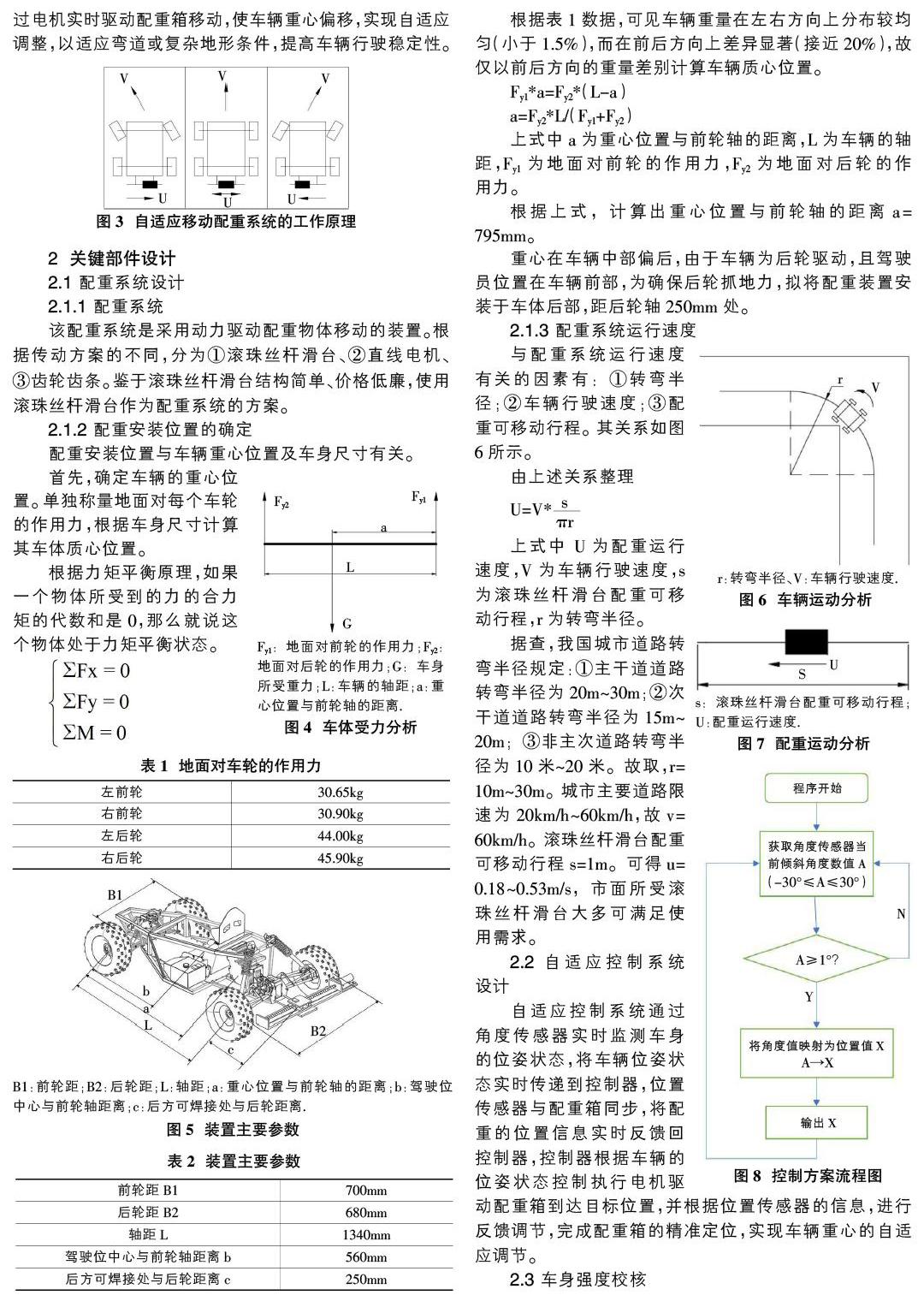
配重系统由滚珠丝杆、滑台体、配重箱和执行电机组成。执行电机驱动滚珠丝杆,控制配重箱进行往复运动,配重箱采用中空结构,能够根据实际需要增加配重质量。
1.1.2 自适应控制系统方案
自适应控制系统由控制器、位置传感器、角度传感器和执行电机组成,完成配重箱的精準定位,实现车辆重心的自适应调节的功能。
1.2 工作原理
当车辆转向并且车身发生倾斜时,配重块向车辆转向的反方向移动。该自适应移动配重工作时,利用传感器对车辆自身和行驶环境进行监测,将信号传递给控制器,通过电机实时驱动配重箱移动,使车辆重心偏移,实现自适应调整,以适应弯道或复杂地形条件,提高车辆行驶稳定性。
2 关键部件设计
2.1 配重系统设计
2.1.1 配重系统
该配重系统是采用动力驱动配重物体移动的装置。根据传动方案的不同,分为①滚珠丝杆滑台、②直线电机、
③齿轮齿条。鉴于滚珠丝杆滑台结构简单、价格低廉,使用滚珠丝杆滑台作为配重系统的方案。
2.1.2 配重安装位置的确定
配重安装位置与车辆重心位置及车身尺寸有关。
首先,确定车辆的重心位置。单独称量地面对每个车轮的作用力,根据车身尺寸计算其车体质心位置。
根据力矩平衡原理,如果一个物体所受到的力的合力矩的代数和是0,那么就说这个物体处于力矩平衡状态。
根据表1数据,可见车辆重量在左右方向上分布较均匀(小于1.5%),而在前后方向上差异显著(接近20%),故仅以前后方向的重量差别计算车辆质心位置。
Fy1*a=Fy2*(L-a)
a=Fy2*L/(Fy1+Fy2)
上式中a为重心位置与前轮轴的距离,L为车辆的轴距,Fy1为地面对前轮的作用力,Fy2为地面对后轮的作用力。
根据上式,计算出重心位置与前轮轴的距离a=795mm。
重心在车辆中部偏后,由于车辆为后轮驱动,且驾驶员位置在车辆前部,为确保后轮抓地力,拟将配重装置安装于车体后部,距后轮轴250mm处。
2.1.3 配重系统运行速度
与配重系统运行速度有关的因素有:①转弯半径;②车辆行驶速度;③配重可移动行程。其关系如图6所示。
由上述关系整理
上式中 U为配重运行速度,V为车辆行驶速度,s为滚珠丝杆滑台配重可移动行程,r为转弯半径。
据查,我国城市道路转弯半径规定:①主干道道路转弯半径为20m~30m;②次干道道路转弯半径为15m~20m;③非主次道路转弯半径为10米~20米。故取,r=10m~30m。城市主要道路限速为20km/h~60km/h,故v=60km/h。滚珠丝杆滑台配重可移动行程s=1m。可得u=0.18~0.53m/s,市面所受滚珠丝杆滑台大多可满足使用需求。
2.2 自适应控制系统设计
自适应控制系统通过角度传感器实时监测车身的位姿状态,将车辆位姿状态实时传递到控制器,位置传感器与配重箱同步,将配重的位置信息实时反馈回控制器,控制器根据车辆的位姿状态控制执行电机驱动配重箱到达目标位置,并根据位置传感器的信息,进行反馈调节,完成配重箱的精准定位,实现车辆重心的自适应调节。
2.3 车身强度校核
项目通过在全地形卡丁车车架上安装可自适应移动的配重来改变车辆重心位置,提高弯道性能,但是由于赛车工况恶劣,又加装了接近车辆自重30%的配重物,故车身强度可能存在不足。
本项目购置的全地形卡丁车属于桁架式车架,即由钢管焊接而成的空间管阵。其特征是基架(位于与车桥直接相连的钢管所在平面)承受主要载荷,故分析可简化为基架进行。
赛车车架的有限元分析主要基于以下几个工况:静止或匀速行驶工况、制动工况、加速工况以及转弯工况。下面将逐一进行有限元分析,以确定车架强度是否满足要求。
2.3.1 基架受力分析
设驾驶员体重为60kg,驾驶位中心与前轮轴距离为560mm,故可简化为前轮轴分担34.93kg,后轮轴分担25.07kg。故静态最大载荷为前轮轴96.48kg,后轮轴114.97kg,载荷42kg。车身总重m=235.45kg。前、后轮轴位置非常靠近前、后长横梁,配重位置非常靠近后部短横梁处,故将载荷施加于前、后长横梁及后部短横梁处。
F=m*a
参考大学生方程式赛车的经验,在赛车全力制动时,最多可产生a1=1.4g的制动减速度。可得,最大制动力FZ=3230.37N。且赛车全力制动时,前轮制动起绝对作用,故可将载荷至于前长横梁的前侧。
赛车在全力加速时可产生最大a2=1g的加速度。可得,最大加速力FJ=2307.41N。由于全地形车后轮驱动,载荷添加于后长横梁的后表面。
赛车在极限转向时可产生最大a3=1g的侧向加速度,最大转向力FW=2307.41N。可认为载荷作用于侧面最长梁的外侧面。
2.3.2 仿真前处理
選择“固体力学”,在“稳态”情况进行研究。车架使用 4130合金钢,即30CrMo,屈服强度1172MPa。车架在两侧长梁的底面位置进行固定,网格大小为 “常规”。
2.3.3 结果与分析
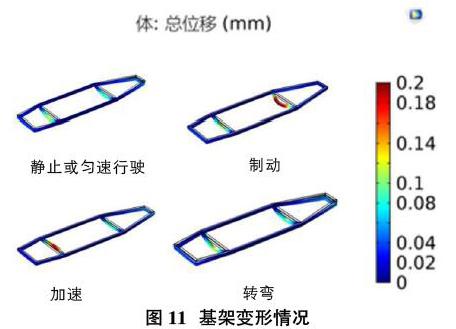
图11分别为车辆静止或匀速行驶工况、制动工况、加速工况及转弯工况时载荷添加情况及分析结果。
分别分析了车辆静止或匀速行驶工况、制动工况、加速工况及转弯工况,其最大应力分别为197MPa、624MPa、554MPa、204MPa,取安全系数为1.5,计算最大可能应力为936MPa,小于材料屈服强度1172MPa;最大变形分别为0.1mm、0.2mm、0.18mm、0.1mm,变形程度在允许范围内。
参考简志雄所做的有轨卡丁车车架及悬架设计分析,其仿真最大应力值为890.6MPa;参考《大学生方程式赛车设计》一书,书中仿真各工况车架最大变形量为0.20mm-0.34mm之间。与笔者所作工作结果差异不大。
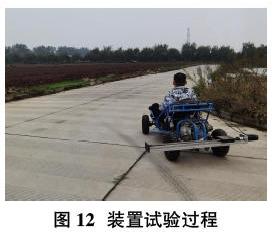
3 性能试验
本实验使用全地形卡丁车、滚珠丝杆滑台、逆变器、伺服电机控制器、位置传感器、角度传感器进行。试验场地为平坦的铺装路面。由驾驶员驾驶车辆,分别对比是否开启该装置对车辆过弯的影响,以及开启该装置后,车辆在不同速度下过弯的情况。
4 结论
本文根据现有提升车辆弯道性能的装置,采用移动式配重的方法,并利用传感器及控制器实现对车辆状态的实时监控、自适应的驱动配重平衡弯道中的重量转移。最大限度保证了车辆的过弯姿态,提高车辆过弯极限。
相比固定式配重,自适应移动配重能实现在多种弯道情况下的合理重心调整,对进一步提高过弯性能有着一定的作用。相较于增加悬架刚度、非对称车辆调整的方法,该方案结构简单,可适用于提高赛车、特种车辆、农用车辆等复杂路况下车辆的稳定性。
参考文献:
[1]Finite Element Modeling of an Aluminum Tricycle Frame_A. Rodríguez, B. Chiné*, and J. A. Ramírez.
[2]王建,林海英.大学生方程式赛车设计.
[3]formula1.com.
[4]简志雄.有轨卡丁车车架及悬架设计分析.
[5]极限速度揭秘_Ross Bentley.
[6]许梦洁.基于巴哈越野车的一种儿童赛车防倾装置.
[7]瞿育文.基于时滞轮胎反馈的车辆主动悬架振动控制研究.
[8]邓召文.赛车空气动力学套件设计与气动特性研究.
[9]高宁.赛车横向稳定杆的设计研究.
[10]李雨轩.基于小型赛车的悬架第三弹簧装置的设计.
