形状记忆合金驱动的软体仿生手掌
2022-01-06孙茂凱陈羿宗王生海韩广冬徐小清陈海泉
孙茂凱,陈羿宗,王生海,韩广冬,徐小清,陈海泉
(大连海事大学轮机工程学院,大连 116000)
现有的机器人手指80%以上采用刚性部件来控制机械手臂或手指,以达到人们的预期目的。刚性部件包括刚性关节、刚性轴、以及尺寸较大的舵机或者步进电机,刚性机器人刚性部件越多其控制的精度也就越高[1],与之对应的是结构复杂刚性部件以及相应的运动反馈控制系统。形状记忆合金作为一种新型的合金材料被应用于软体机器人领域[2]上,具有驱动部件少,驱动方式和控制系统简单的特点因而被广泛研究。
中外在形状记忆合金(shape memory alloys,SMA)方面做了很多设计和应用,例如,美国新泽西州立大学研制出形状记忆合金的驱动的单指样机[3],伊朗德黑兰大学研制的用记忆合金丝驱动的轻量化手套[4],可用于病人手指康复运动,2013—2017年韩国首尔大学机器人实验室研制出由筋线驱动的可穿戴手套exo-glove等[5-6]。南京航空航天大学设计了一种形状记忆合金驱动的柔性手指康复机器人并建立了运动学以及力学模型,可以完成日常弯曲以及抓握功能[7]。
基于此,现设计研究一种形状记忆合金驱动的软体仿生手掌,利用软件solidworks构建三维模型而后通过3D打印出手掌基体以及软体仿生手指的模具,后通过聚二甲基硅氧烷浇筑出软体仿生手指。选用arduino作为控制模块驱动记忆合金运动,驱动结构简单,同时建立软体仿生手指的运动学模型并进行MATLAB进行运动学仿真分析,试验研究软体仿生手掌的弯曲能力和实际的抓取能力,以期为研发形状记忆合金驱动的软体仿生手掌提供理论和实验基础。
1 材料选择
需要选择合适的驱动材料,以及选择合适的材料制作作为软体仿生手掌的支撑,并对软体仿生手指完成材料的选择。
1.1 驱动材料形状记忆合金
形状记忆合金驱动的软体仿生手掌性能由记忆合金的驱动特性[8]决定,现在主流的记忆合金主要是单程形状记忆合金和双程(温控)形状记忆合金,单程形状记忆合金在低于相变温度时会收缩。此时对形状记忆合金加热,即会恢复到初始的状态。双程(温控)形状记忆合金可以同时记忆低温状态和高温状态,在对形状记忆合金加热时就会收缩,而恢复到低温状态时形状记忆合金就会恢复到加热前的状态。利用双程形状记忆合金收缩时产生的驱动力,可以作为软体仿生手掌的驱动源。现选用0.3 mm的双程(温控)形状记忆合金为试验对象。形状记忆合金的物理性能参数如表1所示。

表1 记忆合金物理性能参数Table 1 Physical performance parameters of memory alloy
1.2 软体仿生手指材料选择
分析比较了两种软体仿生材料,聚氨酯和聚二甲基硅氧烷(硅胶),聚氨酯在工业上一般是一体化成形,只能对成块的聚氨酯进行切割以获取想要的目标形状,且聚氨酯发生形变所需要的力较大,聚二甲基硅氧烷(硅胶)兼顾良好的弹性及需要较小的形变力,并且可以在模具中浇筑进而获取想要的形状。道康宁聚二甲基硅氧烷性能参数如表2所示。单一结构的聚二甲基硅氧烷的回弹性对软体仿生手指而言有一定的欠缺性,需要其他材料加以辅助。
1.3 手掌模型选择
在三维软件solidworks中设计出软体仿生手掌的基本结构,如图1所示。手掌掌部采用3D打印的合成树脂材料,手指部分采用软体仿生材料,要求是兼顾可弯曲性以及良好的回弹性能,手掌依靠0.3 mm的双程形状记忆合金作为驱动力,双程形状记忆合金受热后超过其相变温度发生收缩形变带动软体仿生手指实现整个手指结构的机械运动。在双形状记忆合金恢复到初始温度后,此时就依靠有回弹性的软体仿生手指恢复整个手指结构的原状。
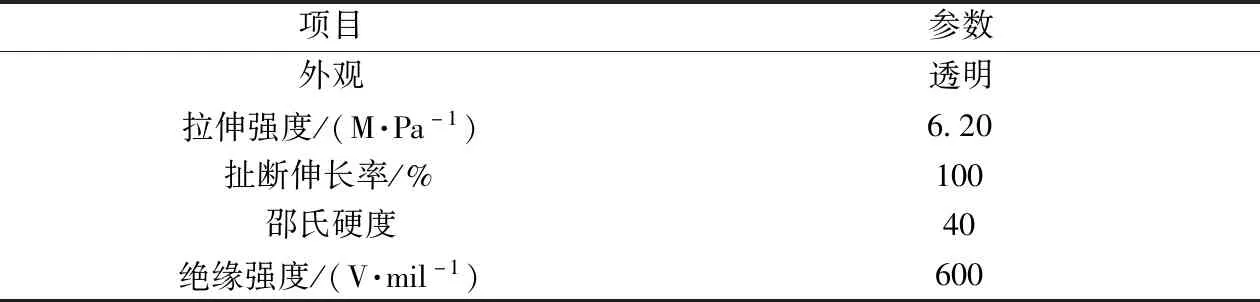
表2 道康宁聚二甲基硅氧烷主要参数表Table 2 Main parameter table of dow corning dimethicone

图1 solidworks三维手掌模型Fig.1 solidworks’3D palm model
2 软体仿生手指制作
选定合适的材料后要对软体仿生手指进行制作,包括对手指的浇筑、软体仿生手指弹性加强以及最后的组装。
2.1 软体仿生手指的浇筑
利用solidworks软件进行对软体仿生手指进行模具的设计,如图2所示,再利用3D打印技术打印出基本的模具,其中每隔一段距离设计一段凸起平台,相应的浇筑出来的软体仿生手指会有凹下去的平台,软体仿生手指在弯曲时由于应力集中弯曲部分主要集中在凹下去的平台部分。利用美国道康宁聚二甲基硅氧烷(硅胶)在打印好的模具中进行浇筑,经过一段时间的固化后进行脱模操作即可以得到预设计的软体仿生手指,值得注意的是主剂以及固化剂之间不同的配比决定了软体仿生手指的弹性以及硬度。主剂和固化剂之间的比例在10∶1比较合适,同时在较高的温度下可以加快聚二甲基硅氧烷的固化速率。此方法可以得到适合试验要求的弹性以及硬度的软体仿生手指。浇筑的软体仿生手指拉伸强度在6.20 MPa,扯断时的伸长率100%,可以满足试验的要求。在浇筑之前可以在模具表面涂抹少量的凡士林,在脱模操作时会比较顺利。软体仿生手指模具以及浇筑图如图2所示。
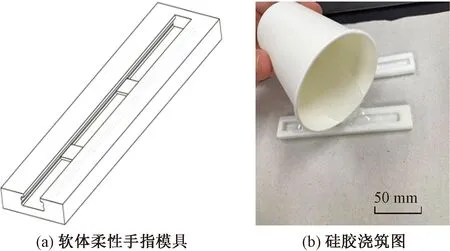
图2 软体仿生手指模具及胶浇筑图Fig.2 Soft flexible finger mold and glue pouring diagram
2.2 软体仿生手指的弹性加强
在聚二甲基硅氧烷完全固化进行完脱模操作之后,测试其回弹性,发现聚二甲基硅氧烷的回弹性稍有不足,研究表明,玻璃纤维因为其良好的绝缘性、耐热性和韧性被广泛应用于复合材料中的增强材料。采用玻璃纤维对聚二甲基硅氧烷的回弹性进行加强,将玻璃纤维紧密贴合在浇筑好的软体仿生手指的背面。进行手指的回弹性能测试发现贴合玻璃纤维后的软体仿生手指可以满足试验的需要。
2.3 软体仿生手指组装
在模具的制作中已经对双程形状记忆合金预留了专门的孔道,双程形状记忆合金从五路加热模块的正极出发通过孔道绕软体仿生手指一周回到负极。双程形状记忆合金与不可收缩的绳相比,不必设专门的收绳机构,只需要将驱动部分的双程形状记忆合金固定。双程形状记忆合金在温度达到相变温度之后,会发生自我收缩,产生的形变力会使软体仿生手指发生弯曲。当温度降下来之后又会恢复软体仿生手指的原状。
3 软体仿生手掌的控制方法及系统
完成对软体仿生手掌的驱动需要选定合适控制模块以及设计合适的控制系统。
3.1 控制模块
通过对双程形状记忆合金特性分析,即通过控制形状记忆合金的受热相变收缩产生的驱动力,便可以实现对软体仿生手指的控制。目前,对形状记忆合金的主流加热控制方式主要是脉冲编码调制(PCM)和脉冲宽度调制(PWM),其中PWM因为其控制简单有效且模块的体积小成为市场的主流。采用灵活方便的Arduino Uno开源微处理器[9],其中有6路PWM输出口、6路模拟输入、1个电源及通信接口接口、1个16 MHz的石英晶体振荡器、1个电源接头以及复位按钮组成。Arduino微处理器输出的PWM信号可以满足驱动记忆合金丝的需要。如图3所示。
由于arduino自带的PWM接口输出电流无法驱动形状记忆合金,需要将PWM信号进行电压放大,本文研究中设计的是一个由5根软体仿生手指构成的手掌,因此需要设计一个5路加热模块(图4)。
3.2 软体仿生手掌的控制系统
如图5所示,由上位机将程序上传至arduino模块同时给arduino供电,由于arduino模块无法直接驱动软体仿生手掌,所以将arduino输出的5路PWM信号传送给5路加热模块。5路加热模块由24 V锂电池单独供电,5路加热模块直接与5组记忆合金丝相连接并通过PWM信号实现对5组记忆合金的控制,使记忆合金发生受热收缩或者冷却伸长的现象,让软体仿生手掌的手指达到预期的弯曲角度。
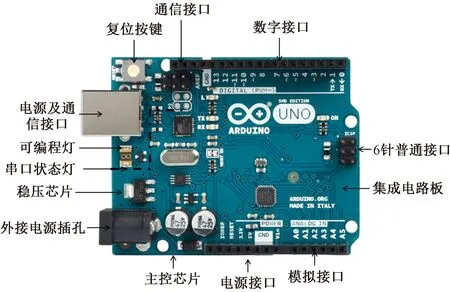
图3 arduino控制模块Fig.3 arduino control module

图4 5路加热模块Fig.4 Five-way heating module
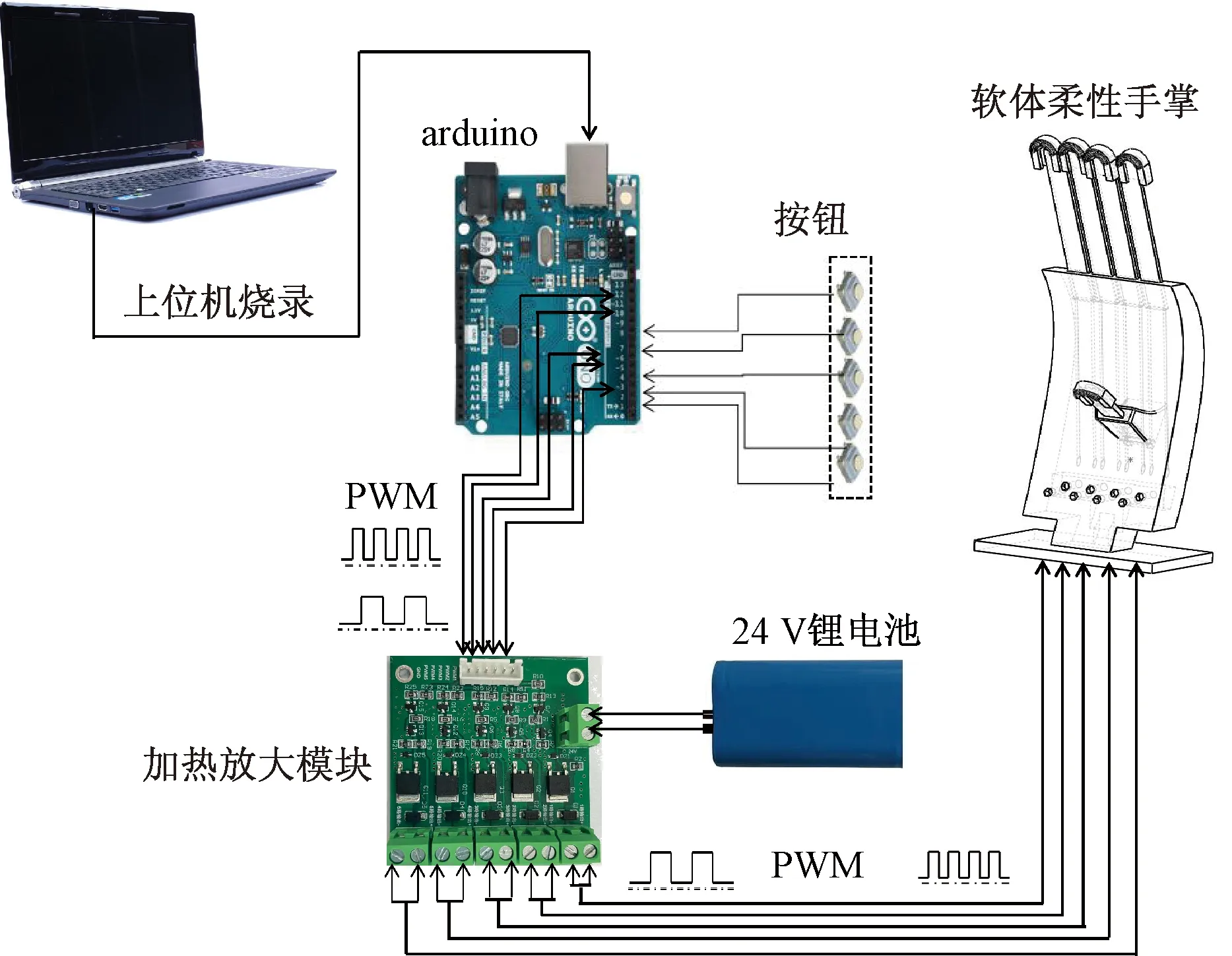
图5 软体仿生手掌控制系统Fig.5 Software flexible palm control system
4 运动学模型
采用经典的D-H矩阵(Denavit-Hartenberg matrix)的方法对软体仿生手指完成运动学模型的建立,并对D-H模型完成优化同时使用MATLAB对模型进行仿真分析。
4.1 软体仿生手指的D-H矩阵运动学分析
采用D-H矩阵[10]的方法对软体仿生手指进行运动模型的建立,将软体仿生手指简化为三段关节,以此来确定合适的末端关节的运动轨迹。
其中在各个关节点建立坐标系,以X轴为软体仿生手指方向,以Z轴为软体仿生手指的旋转所围绕的轴。D-H方法需要4个变量即θn、dn、αn、an,变量θn为软体仿生手指关节饶Z轴旋转的角度,dn为关节偏移的距离,αn为相邻的Z轴绕X轴的扭角,an为软体仿生手指的各段的长度。其中θn、dn、αn中的n为实数,an中的n=1,2,3。如图6所示。
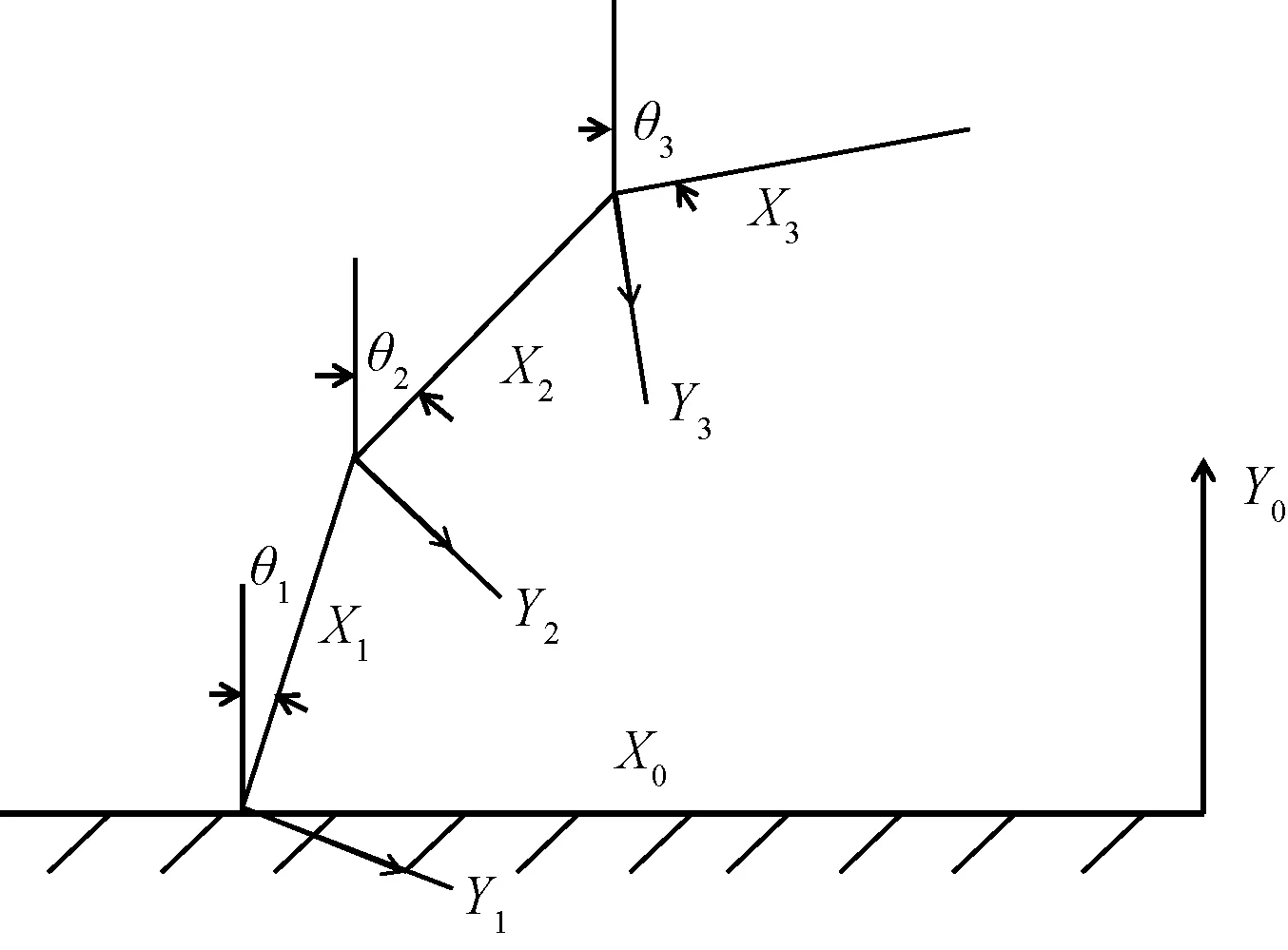
θ1为软体仿生手指转动的角度,θ2及θ3同理;X0及Y0分别为水平坐标轴及垂直坐标轴图6 软体仿生手指坐标图Fig.6 Software flexible finger coordinate map
将第n个平面直角坐标系中的坐标点换算成第n-1个坐标系中的公式为
(1)

(2)
式中:n-1An为第n个平面直角坐标系换算成第n-1个平面直角坐标系的矩阵变换;其中第n个平面直角坐标系的坐标A0换算全局坐标为
0An=0A11A22A3…n-1An
(3)
将软体仿生手指简化成3个关节的运动,设3段软体仿生手指关节的长度由近端到远端依次为a1、a2、a3,其中关节的偏移量dn,在理想状态下可以忽略为零。有了这些设定量可以得
0An=


(4)
同理可求:
依据近些年的研究数据体现出,主动详情线模型有着强悍的提取和追踪特定区域内所想要去的的目标的功能,所以适用于医学图像比方CT、MBI和对于超生图像的处理,从而获得想取得的器官和组织的详情。有研究人员以活动详情模型为基础,对医学超声图像的分割进行深入的探索和研究。文章一梯度矢量流主动详情线为模型和基础,对软组织中的肿瘤图像进行分割尝试,达到了预期的理想效果。
0An=0A11A22A3=

(5)
将软体仿生手指简化为二维平面的基本模型,以初始关节为原点,建立如图所示的平面直角坐标系,将软体仿生手指的运动简化为在平面直角坐标系中的运动,在手指未动作完全伸展时,远端关节的末端点设为P点(Px,Py),θ1、θ2、θ3分别为初始关节、中段关节、远端关节之间转动的角度,初始关节、中段关节、远端关节的长度分别为l1=37 mm、l2=38 mm、l3=35 mm。
根据条件得
px=l1sinθ1+l2sin(π-θ1-θ2)+
l3sin(θ1+θ2+θ3-π)
(6)
py=l1cosθ1+l2cos(π-θ1-θ2)+
l3cos(θ1+θ2+θ3-π)
(7)
图7为末端手指关节的运动轨迹图,在将其看作是二维平面运动时,各段手指的长度可以确保末端手指的运动轨迹是一段平滑的曲线,MATLAB计算表明软体仿生手指的运动是比较光滑的轨迹,在软体仿生手掌的抓取过程中,可以保证抓取过程的流畅性,因此,在较为理想的状态下,各段手指的参数的设置是比较合理的。

图7 手指末端轨迹图Fig.7 Finger end trajectory diagram
4.2 软体仿生手指模型优化
由于是软体仿生手指,典型的D-H连杆模型不能直接套用,所以要对运动学模型重新优化[11],图8所示为刚性手指和设计的软体仿生手指图。在软体仿生手指中并不像刚性关节那样成折角弯折而是成一定弧度弯折。所以要对软体仿生手指的运动学模型进行优化。假设软体仿生手指的弯曲部位主要在每段凹下去的平台,且弯曲的角度都不超过90°。图8中各段弹性凹台长度以及假设的未弯曲的手指关节的长度,x=15 mm,a=22 mm,b=8.5 mm,c=24 mm,d=8 mm,e=15 mm。其中w的长度为软体仿生手指插入手掌的长度,故在式(9)和式(10)中并不体现。
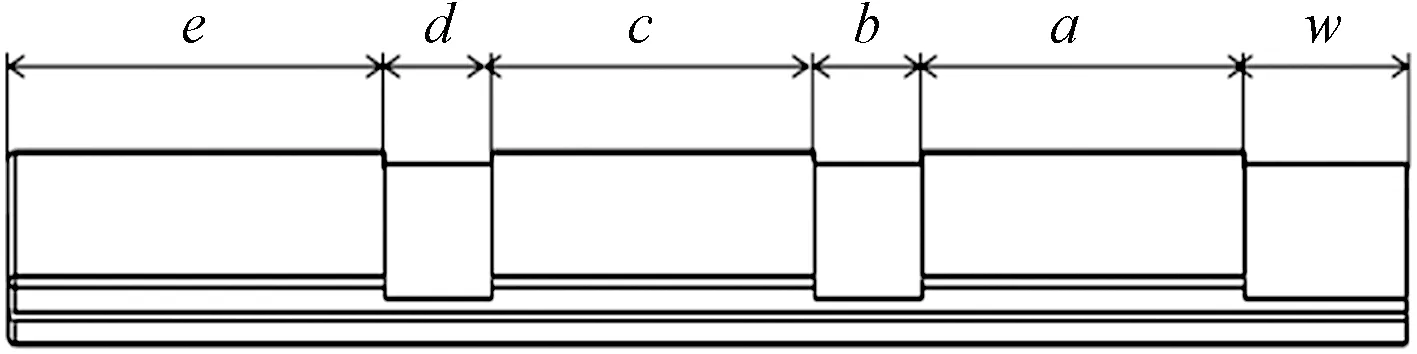
x为插入手掌部分;a、c、e为三段关节的长度;b、d为手指弯曲部分的长度图8 软体柔性手指各部位尺寸图Fig.8 The size and model optimization diagram of each part
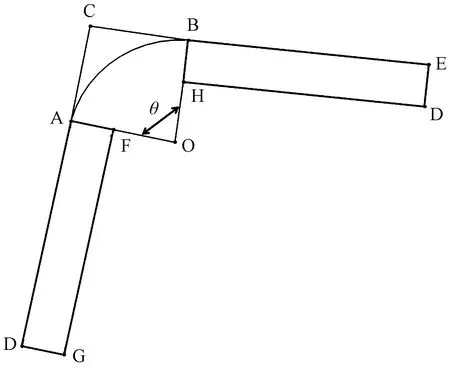
图9 软体柔性手指模型优化Fig.9 Optimization of soft finger model
图9为软体仿生手指的模型优化图,曲线AB的长度为弹性凹台的长度,而矩形AFGD和矩形BEIH是与凹台相连接的假设未弯曲的关节的长度。延长线段DA与EB相交于C点,将C点看成D-H模型中的关节点,CD与CE看成D-H模型中的相连关节,标出旋转的角度为θ,便可以求出CA与CB长度与各段弹性凹台之间的关系,代入通用的D-H模型中便可以得出优化过的软体仿生手指的优化模型。
依上述分析可得关系式:
(8)
式(8)中:LCA和LCB分别为CA和CB段的长度;L弹为弯曲部分弹性凹台的长度;三个偏转角由手指跟部到手指末端关节依次为θ1、θ2、θ3,各段未弯曲指关节与弯曲弹性凹台的长度如图8所示。依上述的D-H模型可得优化后的手指末端关节的坐标关系。
末端关节P的X轴Y轴坐标分别为

θ3-π)
(9)

θ3-π)
(10)
根据优化后的数学模型可知,根据各个关节的偏转角度以及长度便可求出手指末端关节的运动轨迹,如图9所示,将实际的关节长度代入式(10)可得优化后的手指末端的运动轨迹,如图10所示,优化后的手指运动轨迹与D-H连杆模型相比轨迹基本一致,能到达的最远距离略有减小,这由于软体关节处的形变量要大于刚性关节。
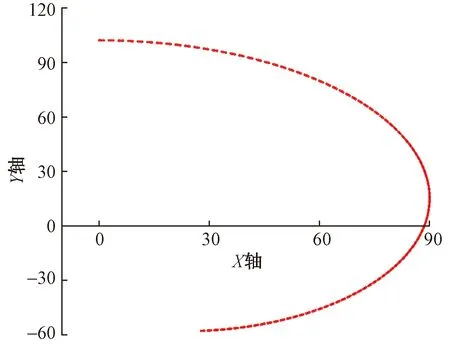
图10 优化后的手指末端轨迹Fig.10 Optimized finger end trajectory
5 试验验证分析
使用上位机将程序下载到arduino模块后,控制软体仿生手掌完成相应的动作并完成对物体的抓取试验。
5.1 软体仿生手掌的动作试验
前文叙述了软体仿生手掌的制作、具体的控制方法以及手指末端的运动轨迹分析,通过弯曲和抓取试验,软体仿生手掌可以产生足够的弯曲形变以达到抓取物体的目的。如图11所示。不同于刚性手指或绳驱动手指,软体仿生手指的抓取力有限,但有较好的柔性,对被抓取物可以做到有效的保护,验证了此手掌在抓取易碎或者活性物体的可用性。该手掌不需要复杂的系统及结构,在未来的抓取研究中有良好的前景。
5.2 实际手指末端运动轨迹分析
通过对软体仿生手指的弯曲试验,在手指的末端贴上黑色标签,与背景颜色明显地区分开,然后用手机拍摄的方式记录下软体仿生手指的运动轨迹上传至MATLAB进行图像识别分析。MATLAB视频捕捉程序可以记录视频中每一帧画面中黑色标签的坐标位置,得到一个m文件记录了每帧画面中黑色标签的位置坐标,绘图后便可求出手指末端的运动轨迹。试验后的运动轨迹图与上文数学建模后的MATLAB仿真图大体一致,证实手指运动学建模的正确性。实际手指末端运动轨迹如图12所示。

(a)~(e)为软体仿生手指在不同阶段的弯曲状态;(f)为软体仿生手掌抓取物体实验图11 软体仿生手指弯曲及抓取实验Fig.11 Soft flexible finger bending and grasping test
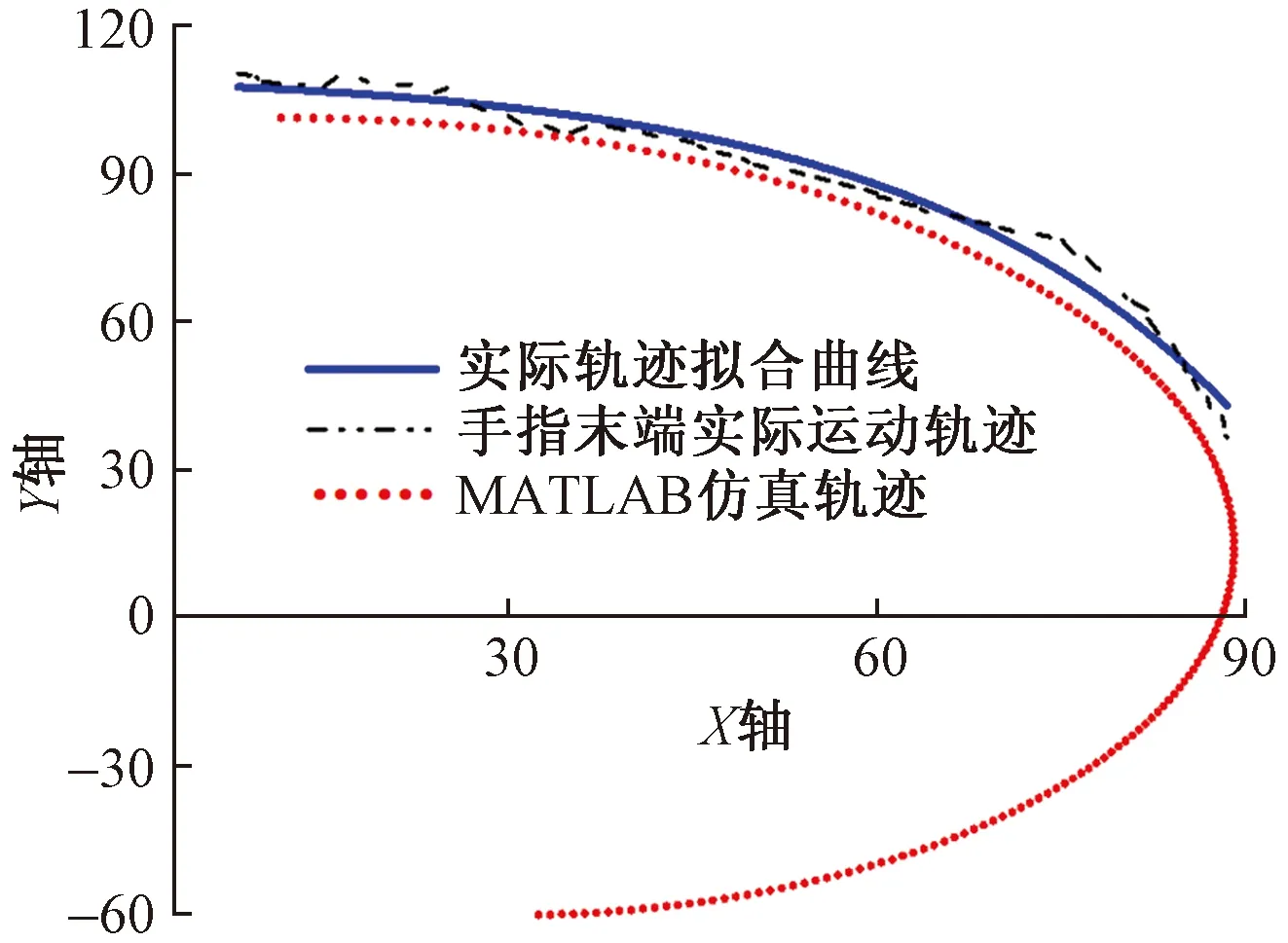
图12 手指末端轨迹Fig.12 Analysis of the actual trajectory of the end of the finger
6 结论
设计了一种形状记忆合金驱动的软体仿生手掌,通过solidworks建立三维模型,并建立软体仿生手指的运动学模型,使用MATLAB对运动学模型进行仿真得出手指末端的轨迹图像,在后期的试验中对实际的软体仿生手指末端运动轨迹用MATLAB进行图像识别分析,验证了运动学建模及软体仿生手掌结构的合理性。该软体仿生手掌在抓取易碎或者活性物体具有可用性,不需要复杂的系统及结构,在未来的抓取研究中有较好的研究价值。