基于卫星遥感数据火山灰云识别方法
2022-01-06张欣蕊
段 炼, 张欣蕊
(中国民用航空飞行学院 空中交通管理学院, 四川 广汉 618307)
火山灰云中的碎屑颗粒物(包括岩石、矿石、火山玻璃碎片等)能够降低大气的能见度,不仅对环境造成很大的污染,而且还损害航空器的飞行控制系统和机身,威胁飞行安全。中国航空运输业都不同程度地受到火山活动的影响[1-2]。随着国际飞行的增多,火山灰云对于航空的影响也引起了重视[3],一旦有大规模火山喷发,产生的火山灰云一般都能冲破对流层并且长期驻留在平流层中,随着大气环流扩散到很大的范围,对全球航空运行造成很大影响。2010年4月,受冰岛埃亚菲亚德拉冰盖火山喷发影响,欧洲多国取消航班或关闭领空,多家航空公司蒙受损失,国际航空运输协会估算全球范围内的航空运营商日损失总计约2亿美元。火山灰云监测预警的研究对减少重大的航空事故和经济损失有很重要的作用,而卫星遥感技术在火山活动监测中逐渐成为主要手段[4]。
1 监测火山灰云遥感传感器类型
卫星遥感能够更好地监测火山灰云,特别是在其扩散后,就更难用普通的雷达或者航天飞机来监测和追踪。第一个提出利用卫星图像对火山云进行气象学方法研究的是Sawada[5],利用的是地球同步卫星(静止卫星GMS-1)研究了西太平洋的火山喷发的相关情况。随着遥感器的增多,对其的研究逐渐深入,比如Malingreau和Kaswanda就是利用NOAA卫星搭载的AVHRR(advanced very high resolution radiometer)于1986年进行火山灰云监测研究[6],而Krueger[7]1983年是用臭氧总量测绘光谱仪TOMS上的紫外线仪器。
就近几年来看,常用的监测火山灰云的遥感器传感器类型主要有以下几种:地球静止环境卫星(GOES)的成像仪和垂直探测仪,美国Terra /aqua卫星携带的中分辨率成像光谱仪(MODIS),Terra卫星搭载的多角度成像仪(MISR),此外还有由中国自主研制和生产的风云3号气象卫星FY-3A卫星上携带的中分辨率光谱成像仪(MERSI)和可见光红外扫描辐射仪(VIRR)传感器[1]。
2 卫星遥感监测火山灰云的方法
2.1 紫外吸收法
在火山灰遥感监测中被最早提出的方法是紫外吸收法[8-9]。火山灰碎屑颗粒物的大部分都是由玻屑、晶屑和岩屑等矿物质组成,以黄色岩屑和黑色岩屑为主,不同的火山灰矿物成分在不同波段范围内具有不一样的光谱反射特征。而这个方法原理是火山灰云中碎屑颗粒物和SO2光谱的吸收特征在不同波段的明显程度不一样,且这两个波段都是在紫外波段范围内,所以取名为紫外吸收法。该方法只是在火山灰云形成前期对其的监测和扩散情况有一定的帮助,但是也存在明显的局限性。因为目前装载有紫外波段范围的遥感器中只有臭氧总量测量光谱仪TOMS,而TOMS传感器的空间分辨率较低,为经纬度1°(约为2 500 km2),时间分辨率也较长,约为1 d[1]。因此,紫外吸收法在后期的火山灰监测中常常只是作为一个辅助的手段。
2.2 模式识别法
在可见光波段火山灰云的光谱反射特征要明显弱于一般气象云团,模式识别法就是利用这一特征来识别火山灰云,这种方法又叫可见光吸收法,在气象云和火山灰云区大致位置识别出来后,还要结合火山灰云的扩散变化形态、风速、地形等因素将云团(包括火山灰云和一般云团)与地面其他地物类型区分出来。这个方法常常结合RGB真彩色方法[10],也就是熟知的红(R)、绿(G)、蓝(B)这3个颜色,以风云三号卫星为例,其分别对应的就是可见光红外扫描辐射计的1、9、7通道[11],合成后的真彩色图像接近自然色,在视觉上更容易对地物识别。这个方法快速、高效。赵谊等[11]针对2010年冰岛艾雅法拉火山喷发前期、中期和后期的遥感数据进行了分析发现,此方法对于火山喷发前期和中期,特别是在火山灰云相对比较聚集或是浓度较高时能够取得较好的监测效果,但是随着后期火山灰云会扩散或者浓度较低时,监测效果就会变差,此时就需要通过饱和度拉伸和去相关拉伸处理等图像增强的方法达到增强图像的目视效果,从而突出了火山灰云具体的位置信息[12]。这个方法受主观因素影响很大,因为需要人为地设置分割阈值来识别火山灰云。
2.3 分裂窗亮温差算法
这是目前最常见并且应用最广泛的识别方法,是1989年由Prata[13]第一次提出,将热红外差值法分析甚高频分辨率辐射计(AVHRR)数据。此算法的原理是火山灰在AVHRR的第4、第 5通道的亮度温度差值(T4-T5)为负值,相反,气象云在第4、第5通道的亮度温度差值(T4-T5)为正值,从而来区别火山灰云与气象云。赵谊等[11]在研究中提出分裂窗亮温差算法(SWTD)在火山喷发前期阶段并不适合,因为此阶段火山灰云较高的温度和水汽含量会补偿酸性物质的反吸收。到喷发中期,SWTD算法的优势就展示出来了,能够有效地屏蔽掉气象云信息。但是当遇到天气和地形比较复杂的情况下,比如在夜晚的陆地、沙漠、非常冷的地表和火山灰云边缘地带, 特别是在非常冷的云顶(如高云)或被冰雪覆盖的陆地,相邻两个热红外分裂窗通道之差往往也会产生负值[14],那么该算法会将一般的云团和冰雪也误判为火山灰云,且误判率很高。
2.4 改进型分裂窗亮温差算法
在后续研究中,一些专门针对复杂地形和气象条件的算法被提出来了,这些算法都是在常见的分裂窗亮温算法的基础上进行进一步的改进,这些算法在一定程度上弥补了一些SWTD的不足。
朱琳等[15]通过分析传统SWTD算法,发现前人对火山灰云的研究重点放在了热红外波段的光谱吸收差异的特征,基于中国自主设计的风云3号气象卫星数据,通过分析火山灰云中常见矿物、气象云、冰雪和陆地等在1.6 μm和2.13 μm两个短波红外通道的光谱反射特征的差异[16],并结合SWTD算法,更有利于在复杂气象条件下监测和识别火山灰云,简称STVA算法。
李成范等[17]提出引用主成分分析(PCA)和独立分量分析(ICA)对 MODIS 传感器的热红外波段数据进行一个预处理,来提高火山灰云遥感监测精度,原因是热红外卫星遥感常常具有波段相关性和数据冗余的问题[18]。但是它的不足也有很多,在利用ICA方法进行火山灰云遥感检测时获取的独立成分出现的次序是随机的,并不是根据火山灰云信息量的大小依次出现的,并且仅能检测出浓度较大的火山灰云信息,而对于浓度较为稀薄的外围火山灰云信息则并未检测出来[19]。
张勤耘等[20-21]提出利用GPS测量方法,这个方法就是利用SNR(接收信号功率与噪声功率的比值,单位dB)仅受火山灰的影响,首先要对SNR数据进行预处理,舍弃高度角低于30°的数据,因为低于30°的SNR数据极容易受到地面反射的影响,与土壤湿度、雪深、海平面高度等因素相关。通过多项式拟合得到拟合信噪比值,并与实际信噪比值相减,得到信噪比差异值。分析SNR异常值随时间变化的情况,进而利用SNR数据监测火山灰变化,一般情况,火山灰的存在会造成信号功率的衰减,造成SNR的降低。
以上改进方法都是针对一次火山喷发的个案研究,普遍适用性不高,因为不同火山喷发形成的火山灰云的矿物组成和化学成分以及喷发时所处的环境有差异,其次不同的卫星的探测通道以及空间分辨率的差异[1],会导致方法对火山灰云的监测强度和范围产生偏差。为了提高准确性,同一算法针对不同火山喷发及其使用的数据,要进行针对性的改进,比如在利用 PCA 进行火山灰云监测时,需要根据研究区和火山灰云的实际情况,分别采用与之相适应的遥感数据和处理方法[17],无疑是增加了工作量和计算量,所以还需要进一步验证和精简算法[22]。
3 美国GOSE-R卫星的ABI-VAA火山灰探测算法
本算法就是基于美国地球静止环境业务卫星GOES-R上搭载的主要载荷——先进基线成像仪(ABI),GOES-R系列是美国最先进的地球同步气象卫星中的第三代的首颗星,后续计划发射GOES-S/T/U卫星,它的出现大大提高了时间和空间分辨率以及光谱通道数,能做到每30 s提供一次高分辨率卫星图像。GOES-R系列搭载的有效载荷除ABI外还包括地球静止轨道闪电绘图仪(GLM)、太阳紫外成像仪(SUVI)、远紫外与X射线辐照度探测器(EXIS),以及空间环境原位测量装置(SEISS)等[23]。ABI有16个探测通道,包括2个可见光、4个近红外和10个红外通道,可见光空间分辨率为0.5 km,红外分辨率为1~2 km[24]。具有多种扫描模式,地球全盘扫描时间为5~15 min,美国本土(3 000 km×5 000 km)扫描时间达到5 min,中尺度区域(1 000 km×1 000 km)扫描时间达到30 s[25]。
ABI-VAA火山灰云监测算法首先进行灰分检测,判断火山灰云的区域和位置,再进行灰分检索,确定火山灰云区的灰云高度和质量负荷。灰分检索采用和ABI云顶高算法相同的通用检索过程,因火山灰云在光谱上与气象云特征有较大差异,对检索过程的细节进行了修改[26]。
表1包含ABI-VAA当前使用的主要传感器数据和辅助数据。其中主要的传感器数据是指仅从ABI观测和地理位置信息中获得的信息,而辅助数据是指需要ABI观测或地理位置数据中未包含的信息的数据。
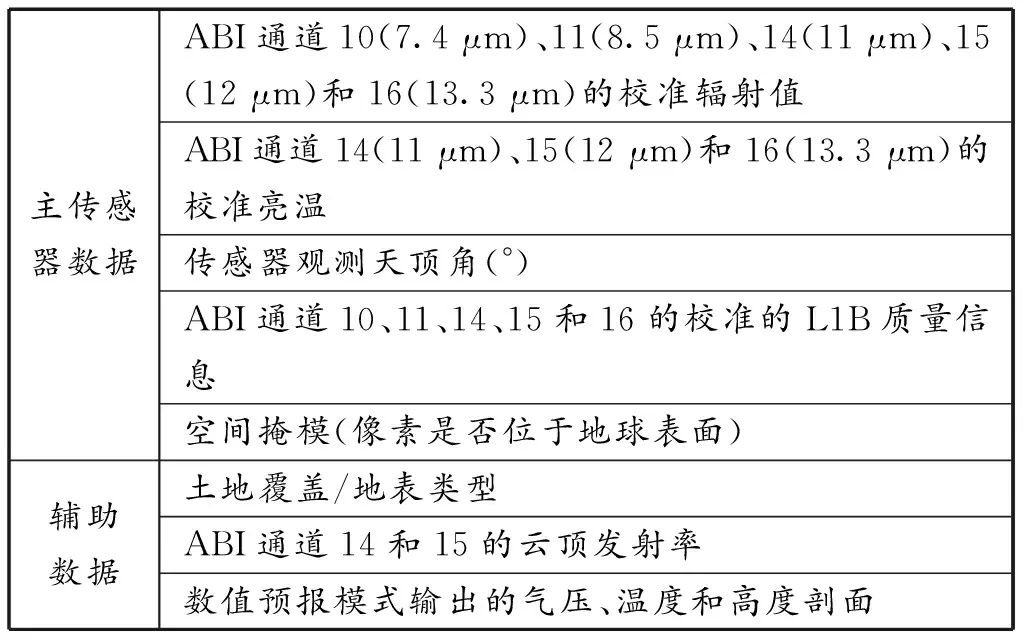
表1 ABI-VAA输入的主要数据
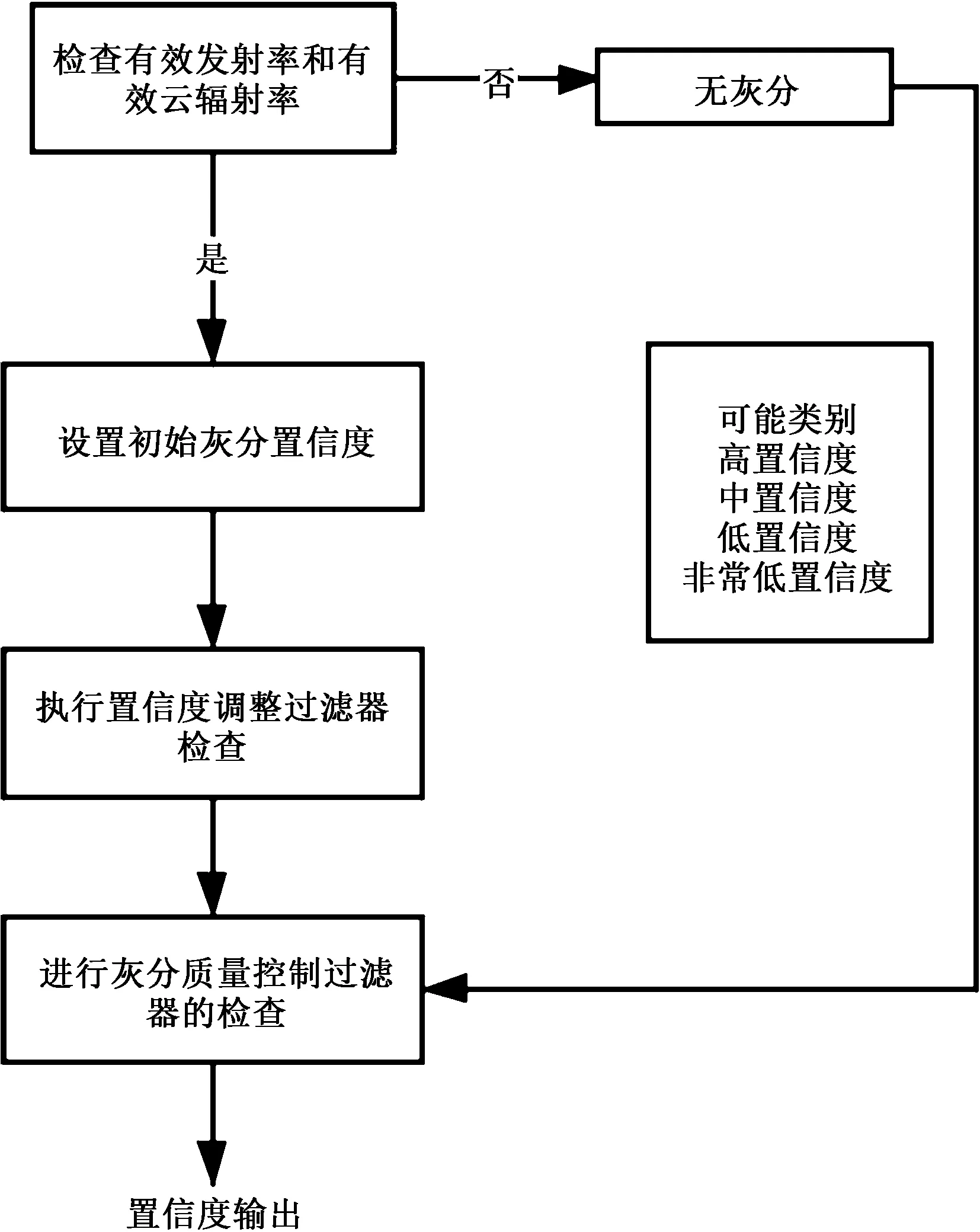
图1 灰分检测算法流程
图1显示了灰分检测算法的流程。算法的基本流程是先检查有效数据,然后设置初始灰分置信度、运行灰分置信度调整过滤器、运行额外的灰分质量控制过滤器,并输出最终灰分置信度(单层和多层置信度)。检索算法使用灰分置信度信息来确定何时执行检索,以及在检索中应该做出哪些假设(单层或多层)。
首先进行β比的初始灰分置信度,为每个像素分配一个初始灰分置信度,仅当像素同时满足表2所有条件时,认为该像素是包含火山灰的候选材料,否则不符合上述条件的像素被分配为“无灰分”的“总置信度”。其中εstropo(λ)是用对流顶层单层假设计算出的云光谱发射率,βstropo(λ1/λ2)代表通过这一类型发射率计算出的β。

表2 灰分置信度检测阈值
图2给出了βstropo火山灰、水云和冰云的βstropo(8.5/11 μm)和βstropo(12/11 μm)曲线。阴影部分为火山灰置信区,浅灰色表示“高”置信度,中灰色表示“中度”灰分置信度,深灰表示具有εstropo(11 μm)>0.10的像素“中度”灰分置信度,白色表示“无灰”[26]。
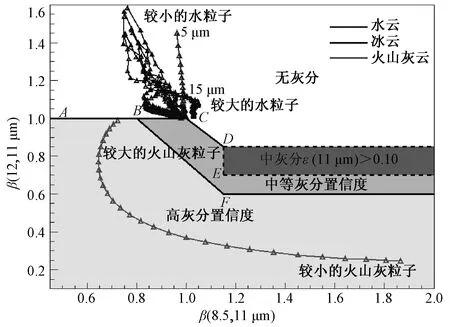
图2 火山灰、水云和冰云的βstropo曲线
这些灰分置信度会继续执行置信度调整过滤器检查和灰分质量过滤器的检查。为了消除孤立的火山灰虚假警报,会将之前构造的“总置信度”应用于以关注像素为中心的3×3像素阵列作为标准中值滤波器,中值滤波器仅将每个像素的值替换为以该像素为中心的3×3像素阵列的中值。
图3显示了中值滤波器的影响,以埃特纳火山喷发显示的火山灰的置信度为例,图3(a)显示了未应用中值过滤器的结果,图3(b)显示了应用了中值过滤器的结果。事实证明,中值过滤器的确能消除孤立的虚假警报,同时保留了实际的火山灰云[26]。
4 发展趋势与思考
卫星遥感监测火山灰云的紫外吸收法、模式法等常用方法中各有优缺点,想要更加精准地监测火山灰云,不仅要在算法上改进,还需要提高数据的精细度,而本文重点介绍的ABI-VAA算法是基于GOSE-R搭载的主要载荷ABI,具有时间和空间分辨率高的特点,在数据方面不仅仅采用单通道数据,还结合土地覆盖/地表类型、数值预报模式输出的气压、温度和高度剖面等数据。
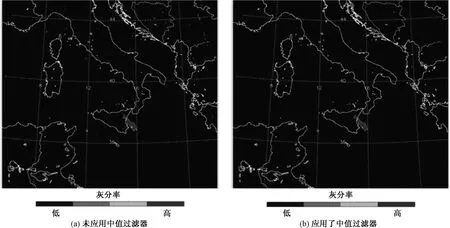
图3 埃特纳火山喷发的火山灰的置信度
随着火山灰云探测技术的发展,探测算法不断增多, 现在不仅仅只是满足于最初的雷达监测或者常规的方法来识别火山灰云,越来越多基于热红外卫星遥感图像的算法在逐渐实现,并且在实现算法的同时,也结合火山灰云的光谱特征、水分含量、温度、SO2含量以及周围背景特征等多方面综合识别。其次监测精度也逐渐增高,由最初的几百千米提高到数千米,在实际应用中,仅识别是不够的,对于火山灰云的扩散追踪和预测成了当下的热点和难点之一。