合成双射流逆向吹吸控制对翼型流动特性影响
2022-01-06赵志杰罗振兵刘杰夫李石清
赵志杰,罗振兵,刘杰夫,邓 雄,李石清,郑 穆
(国防科技大学 空天科学学院,长沙 410073)
0 引言
机械舵面会破坏飞行器良好的隐身性能,且存在饱和(舵面偏转角度存在物理限位)、死区(控制量较小时,舵面存在不启动状态)等非线性现象,铰链等复杂机械传动结构同时也会增大飞行器的载荷。主动流动控制(Active Flow Control,AFC)技术可以在无执行器偏转的情况下,仅通过在流场局部的敏感点位置施加控制,改变全局流场特征,重构飞行器表面的压力分布,进而产生飞行控制需要的姿态控制力及力矩,实现对飞行器姿态的操控。AFC具有无需机械活动面、控制效率高、控制力可调、易于实现一体化设计等优点,目前已广泛应用于飞行控制领域,包括前缘涡控制[1-3]、环量控制[4-6]、推力矢量控制[7-9]等。
B2飞翼布局飞行器将开裂式阻力方向舵与飞行控制系统结合,通过对称偏转上、下操控面的舵偏角提供离轴阻力,实现航向姿态控制。但开裂式阻力方向舵具有较多缺陷,第一,机械驱动结构复杂,增加了一体化设计的难度;第二,隐身性能差;第三,偏航力矩随舵面偏角呈现非线性变化趋势,且与升力、俯仰力矩、滚转力矩相互耦合,增大了控制系统的设计难度[10]。为减小系统整合复杂度,提高隐身性能,Zhu等[11]将反向射流激励器对称布置于上、下翼面近前缘处,通过逆来流定常吹气,于射流出口前形成高压区,增大了流向逆压梯度,迫使流动提前发生分离,在出口后形成大面积低压分离区,增大了压差阻力,进而实现航向姿态控制,其控制效果可达65°方向舵舵效;同时,反向射流气动控制特性结果表明,射流动量系数越大,射流角度越小,激励位置越靠近前缘,背风面形成的分离区越大,压差阻力越大,偏航力矩越大。孙全兵等[12]将反向射流技术应用于小型飞翼布局无人机,并进行了飞行试验验证,结果表明,反向射流具有足够的航向姿态控制能力。
当前,反向射流技术的射流源为轴流风扇,该类射流源消耗功率大,且重量、体积占比较高,不利于一体化设计。研发一种具有质量轻、体积小、能耗低、易于实现一体化设计、方便调控特点的新型反向射流控制激励器,具有极高的应用潜力。
乔治亚理工学院Smith和Glezer发明的零质量合成射流激励器[13]具有无需气源管路、一体化能力强、质量轻、体积小、响应快、控制能力可调、能耗低的优点,在飞行控制领域具有极大的应用潜力[14-15]。但目前,尚未见合成射流在无人机飞行控制领域的实际工程应用,其中主要原因之一是合成射流能量水平较低,控制能力不够,且容易出现压载失效等问题。国防科技大学罗振兵对合成射流激励器进行改进,设计了合成双射流激励器[16-17],该激励器是一种单膜双腔结构,如图1(a)所示,除具备合成射流激励器的优点外,还解决了合成射流激励器能量利用率低、易压载失效的问题,在相同输入功率条件下,合成双射流对流场的控制能力要比合成射流提高一倍[18-19]。目前,合成双射流环量控制技术已成功应用于无人机中,并完成了首次飞行试验验证,结果表明,合成双射流环量控制具有滚转控制能力[20],如图1(b)所示。
合成双射流虽然具备滚转控制能力,仍需进一步发展航向控制技术以保持飞行器正常操控。利用合成双射流取代轴流风扇射流/发动机引气射流的反向射流控制技术,有望成为一种新型无源射流高效航向控制方案。反向合成双射流技术是通过逆来流方向施加合成双射流,改变流场结构与表面压力分布,形成可操控气动力/力矩的新型航向控制技术。基于此,本研究以NACA4412为基础翼型,通过二维数值模拟,探讨不同攻角下反向合成双射流对翼型绕流流场的控制机理及气动控制特性,并通过飞行试验验证其航向控制能力。
1 物理模型与计算方法
选用NACA4412作为基础翼型,设置翼型弦长为0.27 m,分别在翼型上、下表面对称布置反向DSJ激励器,激励器左侧出口设置在20%c处,两侧出口宽度均为0.74%c,两出口间距为5.93%c,射流出口与弦线的夹角均为150°,该物理模型如图2所示。在计算中,设置来流速度为25 m/s,基于弦长的雷诺数为4.6×105。
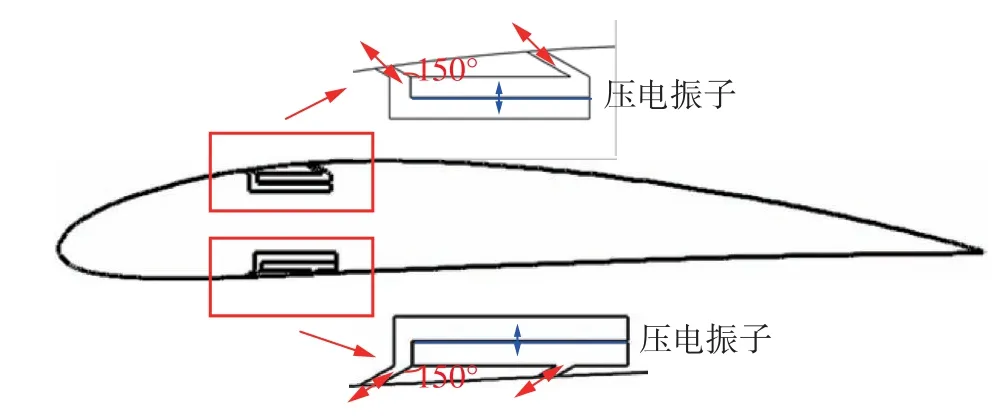
图2 物理模型结构示意图Fig. 2 Schematic diagram of the physical model
选用有限体积法离散二维可压非定常Reynolds平均Navier-Stokes方程,并采用基于密度的求解器进行求解。因为流动中伴随着流动分离现象,所以湍流模型选用SSTk-ω模型。采用Roe-FDS通量差分分裂格式对空间项进行离散,对流项为二阶迎风格式,时间离散格式为二阶隐格式。设置收敛准则为残差小于1×10−5,在非定常计算中,设置时间步长为激励器驱动周期的1/80,每个时间步最大迭代步数为50步,共进行200个流动控制周期的计算,以确保结果的收敛性。
计算网格为基于多块网格对接技术的结构化O型网格,以保证近壁面网格的正交性,计算域及网格如图3所示。计算网格在翼型表面、射流出口、翼型前后缘分别进行了加密处理,翼面的第一层网格高度y+≈1,计算域半径约为40c。翼型表面及激励器壁面设置为无滑移壁面边界条件,计算域外边界为压力远场条件,PZT压电振子设置为周期性波动的压力入口条件。
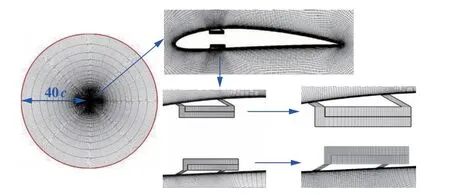
图3 计算网格示意图Fig. 3 Schematic of the computational mesh
在计算时分别采取了8万、15万、21万量级的网格进行计算。在施加DSJ控制前/后,攻角为2°时的升/阻力系数变化分别如表1所示。在网格数大于15万时,控制前后的升/阻力系数已经趋于稳定,故选择计算总网格数为154489。数值仿真下的升、阻力系数与试验结果[21]对比如图4所示,可发现升力系数预测结果与试验相比,在失速前较为一致,失速攻角预测准确(14°),失速后升力系数预测结果偏大,但趋势一致;阻力系数预测结果与试验相比,在失速前较为一致,失速后阻力系数预测结果偏小,但趋势一致。整体上看,本文计算方法具备一定的合理性。
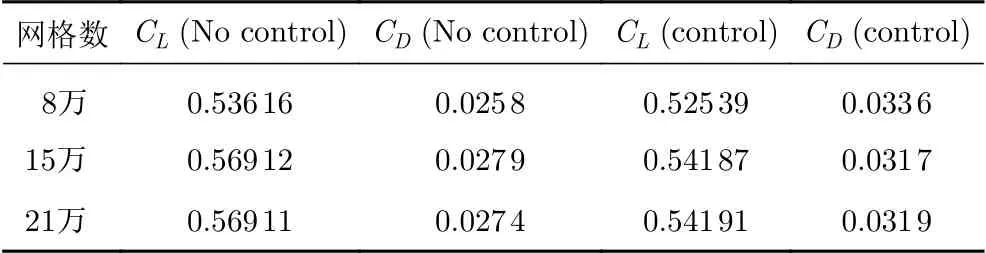
表1 不同网格下升阻力系数对比(α = 2°,Re = 4.6×105)Table 1 Comparison of the lift and drag coefficients CL and CD in different grids (α = 2°, Re = 4.6×105)
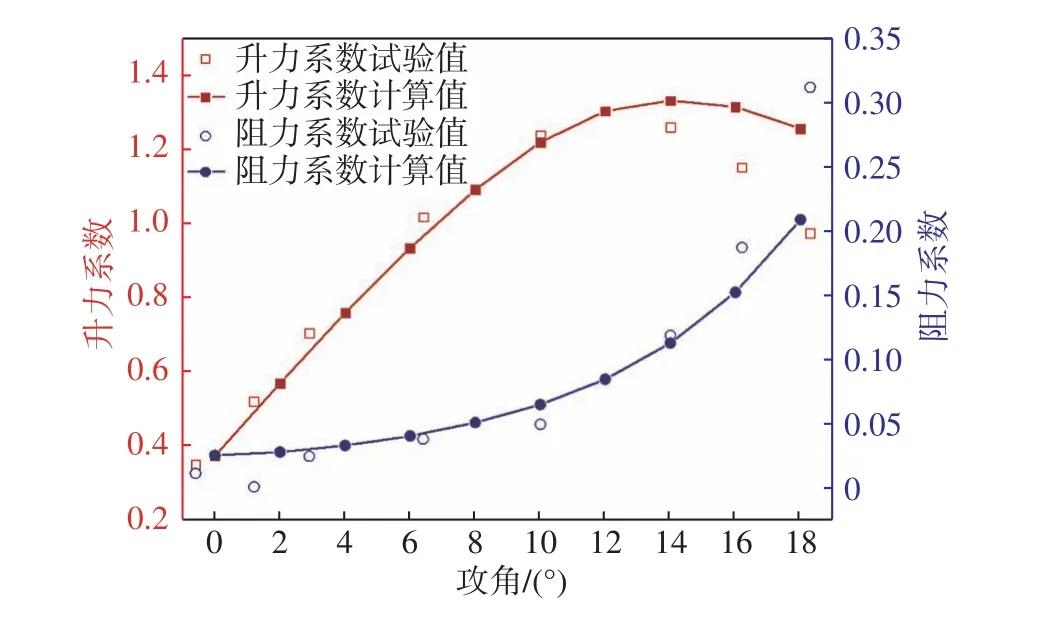
图4 数值模拟与试验数据对比分析(Re = 4.6×105)Fig. 4 Comparison between the numerical simulation and the experimental data (Re = 4.6×105)
反向DSJ的控制参数包括无量纲驱动频率F+与无量纲动量系数Cµ。表达式如下:

式中U∞为 来流速度,Umax为射流峰值速度,f为射流驱动频率,c为翼型弦长,h为射流出口宽度。在进行数值仿真时,固定射流频率为500 Hz,射流峰值速度为22.5 m/s,对应的无量纲参数为:F+= 5.4,Cµ= 0.024。
2 气动力控制特性
攻角0°~18°范围内,施加控制前后的升力系数、阻力系数、升阻比、俯仰力矩系数变化如图5所示,其中俯仰力矩系数是相对于弦线上25%c处计算得到的。
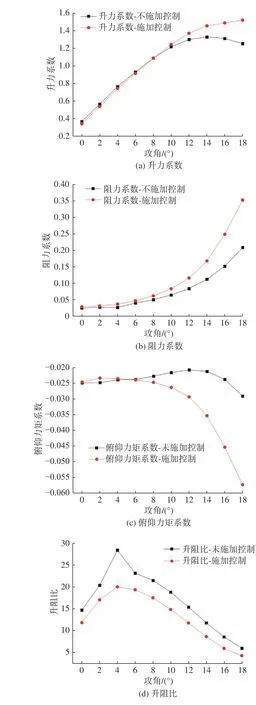
图5 气动力控制前后对比分析Fig. 5 Aerodynamic forces comparison before and after the control
从图5(a)可看出,在小攻角下(<8°),反向DSJ使升力略有减小;在大攻角下(>8°),反向DSJ使升力增大,且攻角越大,增升效果越明显。从图5(b)可看出,在反向DSJ控制下,不同攻角下的阻力系数均有提高,且攻角越大,阻力系数增量越大。从俯仰力矩系数对比图5(c)可看出,小攻角(<8°)下,施加反向DSJ控制,俯仰力矩系数变化不大;大攻角(>8°)下,施加反向DSJ控制,低头力矩系数随攻角增大而增大,且攻角越大,低头力矩增量越大。从升阻比对比图5(d)可看出,施加反向DSJ控制后,整个攻角范围内,升阻比均明显下降,最大升阻比对应的攻角不变,此外,施加控制后,大攻角下的增升效果小于其增阻效果,致使其升阻比减小。
小攻角下,施加反向DSJ控制,阻力增大,升力略有减小,俯仰力矩基本不变,若应用于单侧机翼,会产生偏航力矩及较小的同向滚转力矩,与俯仰通道耦合较弱;大攻角下,施加反向DSJ控制,升力、阻力及低头力矩增大,若应用于单侧机翼,会产生方向相反的滚转、偏航力矩,削弱飞行控制的效果,且存在纵向耦合。可见,小攻角反向DSJ在飞行器航向控制领域的应用潜力更大。下面分别对小攻角、大攻角下,反向DSJ的控制机理进行说明。
3 控制机理
3.1 小攻角下反向DSJ控制机理
以2°攻角为例,施加控制前与施加控制后的周期性阻力波动如图6所示,可见,一个周期内并不是所有时刻阻力都增大,在1/8T~3/8T内,阻力减小。图7、图8分别为施加控制后,一个周期内不同时刻的压力云图与表面压力分布。由于施加反向DSJ控制后,射流影响区域不大,此处仅呈现局部放大图,图中红色箭头表示射流流入/流出状态。
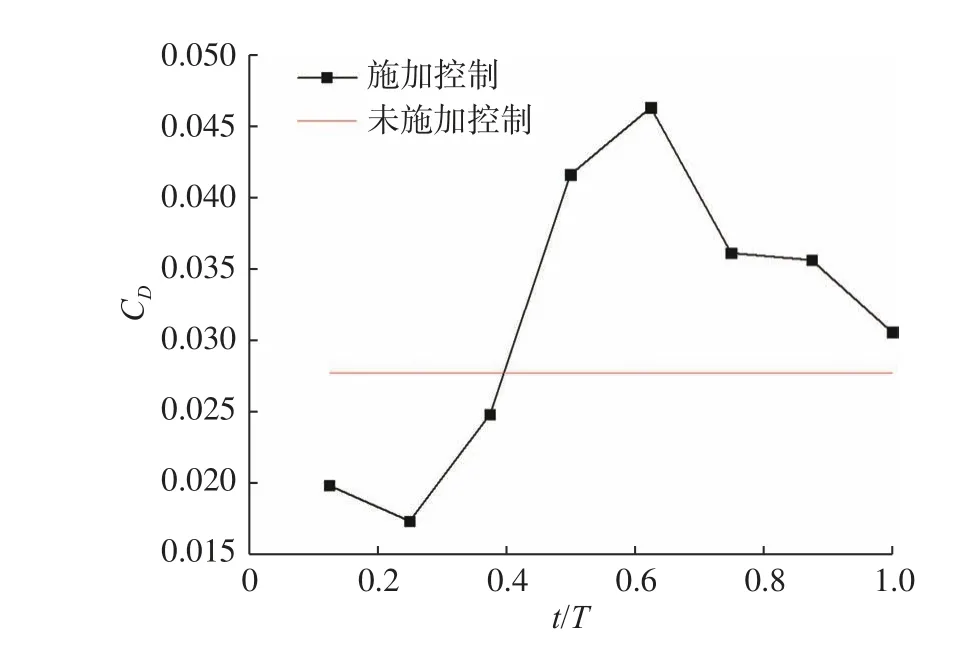
图6 施加控制后的阻力系数波动Fig. 6 Drag coefficient fluctuation after the control
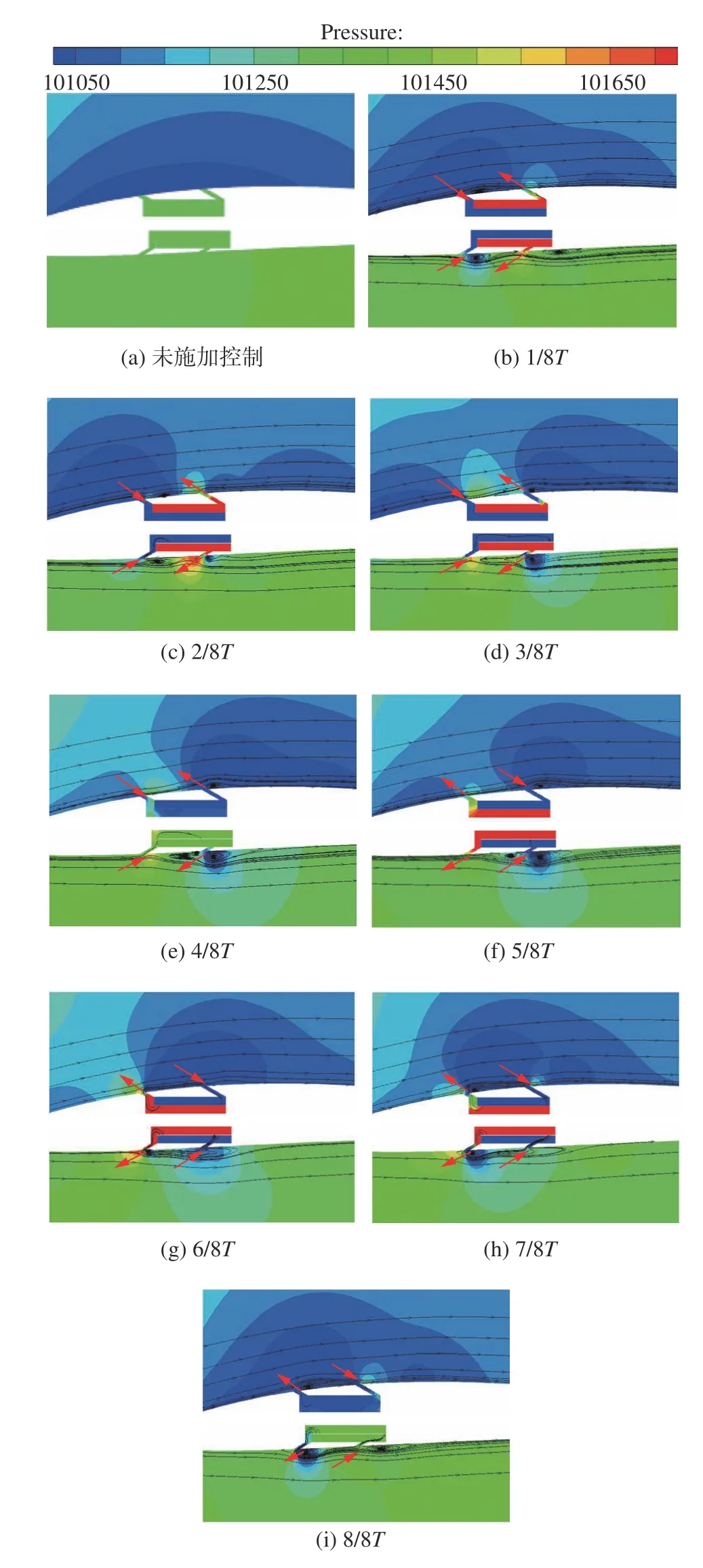
图7 不同时刻压力云图对比(α = 2°)Fig. 7 Comparison of pressure contours at different time instances (α = 2°)
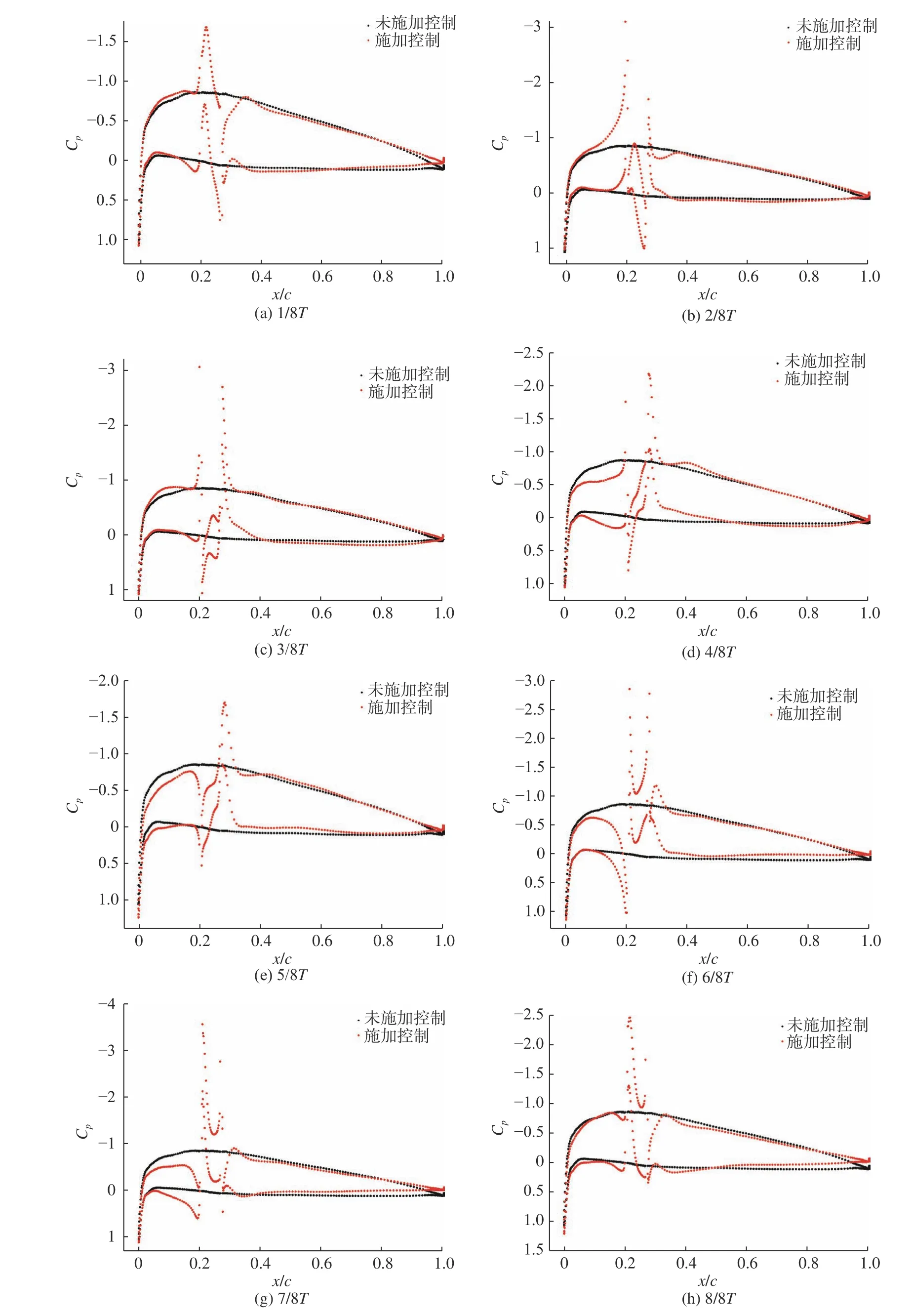
图8 不同时刻压力分布对比(α = 2°)Fig. 8 Comparison of pressure distributions at different time instances (α = 2°)
1/8T时,左侧射流口处于加速吸阶段,上一阶段吹程形成的回流区在两射流口间形成低压区;右侧射流口处于加速吹阶段,高速逆向射流增大了出口处的逆压梯度,在出口附近形成高压区,迫使出口后流动发生分离,此时压差阻力相比未施加控制时减小。
2/8T时,左侧射流口处于加速吸阶段,两出口间的回流区在两侧射流的作用下减小,出口处吸力峰值增大;右侧射流口处于加速吹阶段,随着射流速度的进一步增大,出口前逆压梯度值及影响区域进一步增大,在两出口之间形成高压区,出口后,与壁面剪切形成的低压回流尺度进一步增大,此时压差阻力相比未施加控制时减小。
3/8T时,左侧射流口处于减速吸阶段,出口处负压值及低压区域面积减小;右侧射流口处于减速吹阶段,两出口间的高压区面积进一步扩大,右侧出口下游的分离泡尺度进一步扩大,低压影响区域增大,此时压差阻力比2/8T稍有增大,但比无控制时要小。
4/8T时,左侧射流口处于减速吸阶段,两出口间高压区域面积减小,峰值高压相对减小,但第二个射流出口前的整体高压区域面积增大;右侧射流口处于减速吹阶段,射流口后的分离泡尺度进一步扩大,低压影响区域面积进一步扩大,此时压差阻力相比无控制时增大。
5/8T时,左侧射流口处于加速吹阶段,由于射流对来流的阻挡作用,射流出口附近形成高压区;右侧射流口处于加速吸阶段,出口附近形成低压区,但出口后分离泡尺度略有减小,低压影响区域相对减小,此时压差阻力在一个控制周期内达到最大值。
6/8T时,左侧射流口处于加速吹阶段,右侧射流口处于加速吸阶段,随着左侧射流速度的提升,其出口附近逆压梯度增大,出口前高压区面积增大,左侧射流口后形成大面积低压区域,此时压差阻力相比无控制时增大。
7/8T时,左侧射流口处于减速吹阶段,射流出口前高压区面积相对减小,出口后在与壁面的剪切作用下,产生分离泡,形成低压区;右侧射流口处于减速吸阶段,出口后由于流管扩张,形成高压区,但面积较小,此时压差阻力相比无控制时增大。
8/8T时,左侧射流口处于减速吹阶段,射流出口前高压区面积进一步减小,两出口间的分离泡尺度进一步扩大,形成低压区;右侧射流口处于减速吸阶段,出口附近高压区面积相对增加,此时压差阻力相比无控制时增大。
图9、图10分别为2°攻角下,施加控制前、后的平均速度云图与压力分布对比。其控制机理可归结为:在施加反向DSJ控制后,出口前由于射流的阻挡作用形成高压区,伴随着流向逆压梯度的增加,分别在两个出口后形成准定常低压回流区,致使前后压差阻力增大,但整体压力包络面积基本不变,故升力变化不大。由于此时攻角较小,部分低压分离区可能会削弱增阻效果,当攻角增大时,低压分离区负作用减弱,增阻效果增强。
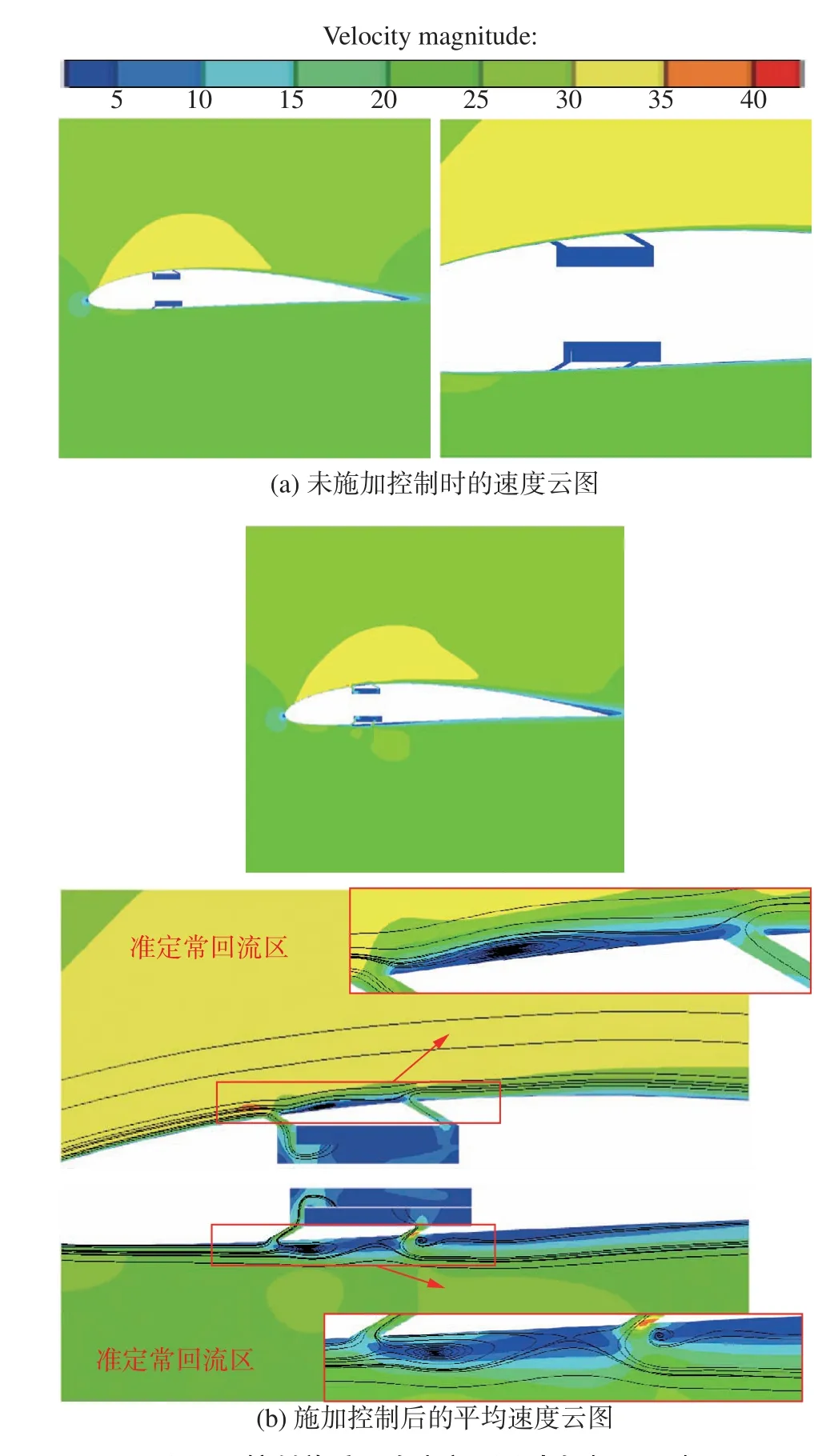
图9 控制前后平均速度云图对比(α = 2°)Fig. 9 Comparison of averaged velocity contours before and after the control (α = 2°)
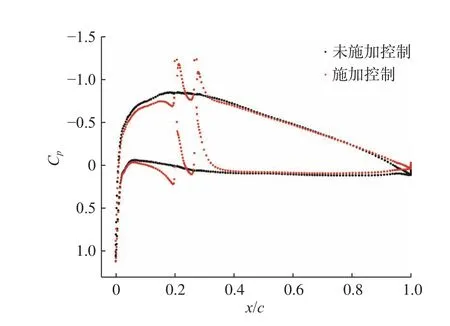
图10 控制前后平均压力分布对比(α = 2°)Fig. 10 Comparison of averaged pressure distributions before and after the control (α = 2°)
3.2 大攻角下反向DSJ控制机理
在攻角大于8°后,反向DSJ控制会使升力、阻力都增大,且增幅随攻角增大而增大,其控制机理不同于小攻角,故以下对大攻角下的流场及压力特性进行分析,以获得大攻角下反向DSJ控制机理。
首先以12°攻角为例,图11、图12分别为施加控制前后平均速度云图与压力分布对比,在背风面,由于反向DSJ控制,流向逆压梯度增大,迫使流动提前发生分离,背风面分离区面积增大,同时降低了分离区内的表面压力,拓宽了压力包络,射流出口前,由于逆向射流的阻挡作用,形成高压区,出口后形成低压区,但射流出口后并未形成类似小攻角工况的低压回流区,这是由于攻角增大后,出口前主流速度提升,射流相对动量系数降低所致;在迎风面,射流出口前、后分别形成高压、低压区域,其机理与小攻角控制机理一致。值得注意的是,背风面激励器两出口的平均状态都是流入状态,迎风面激励器两出口的平均状态都是流出状态,出口状态的不同是膜片压力边界与周围流场压力变化的综合作用所致,并与分离迟滞现象有关[22]。由于射流出口前、后高压、低压区域的形成以及背风面低压分离区面积的增大,致使压差阻力增大;由于背风面分离区面积的增大及分离区内表面压力的降低,致使低压影响区域更广,拓宽了压力包络,进而增大了升力。
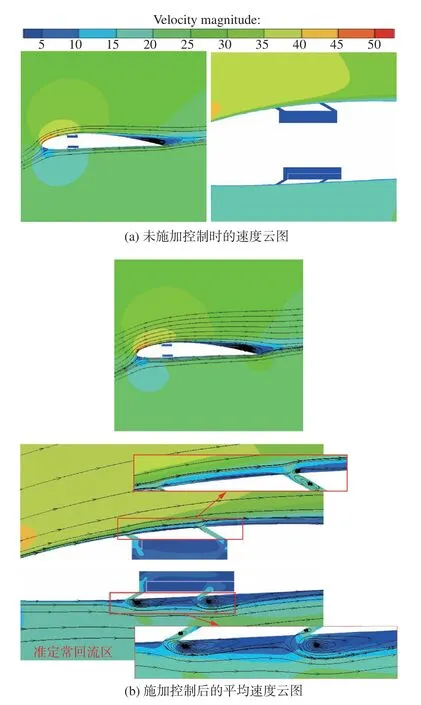
图11 控制前后平均速度云图对比(α = 12°)Fig. 11 Comparison of averaged velocity contours before and after the control (α = 12°)
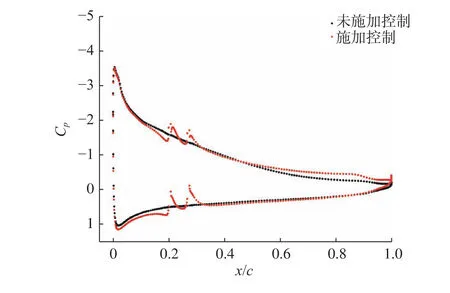
图12 控制前后平均压力分布对比(α = 12°)Fig. 12 Comparison of averaged pressure distributions before and after the control (α = 12°)
图13为16°攻角下,施加控制前、后不同时刻的压力云图与流线图,图中红色箭头表示出口射流的流入/出状态。在背风面,每个时刻的流动都提前发生分离,1/4T时,左侧射流处于加速吸阶段,出口附近形成低压回流区,右侧射流处于加速吹阶段,出口前由于射流的阻挡作用,形成高压区,出口后形成相对低压区域;2/4T时,左侧射流处于减速吸阶段,右侧射流处于减速吹阶段,两射流口间形成高压区域,增大了流向逆压梯度;3/4T、4/4T时,左侧射流分别处于加速吹、减速吹阶段,在射流与主流的相互作用下,左侧射流出口前后分别形成高压、低压区域,增大了压差阻力。
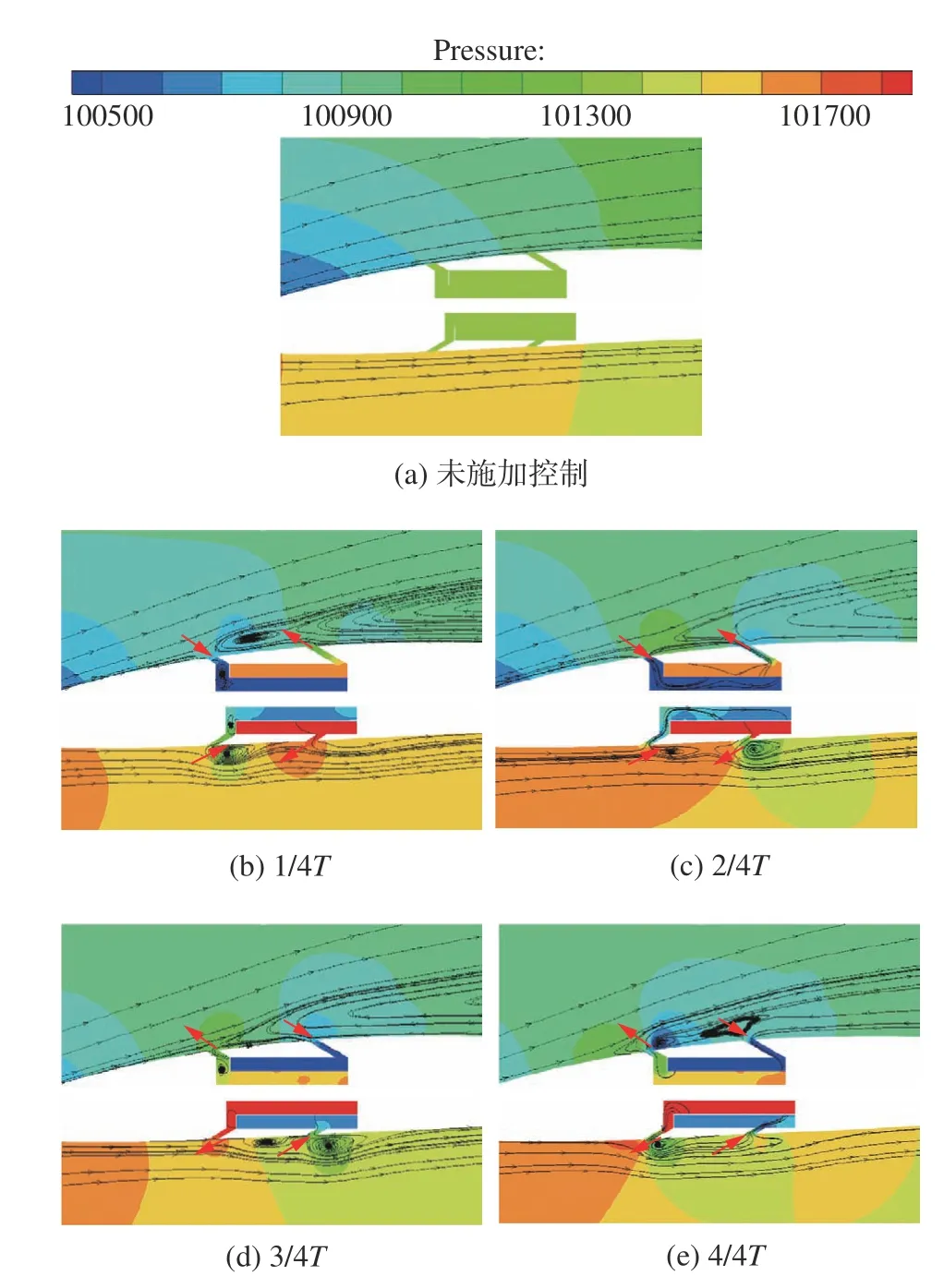
图13 不同时刻压力云图(α = 16°)Fig. 13 Pressure contours at different time instances (α = 16°)
图14、图15分别为16°攻角下,施加控制前后的平均速度云图与压力分布对比。在背风面,由于反向DSJ控制,迫使流动提前分离,分离位置由激励器后转移至激励器前,分离区面积增大,同时,分离区压力也进一步降低,拓宽了压力包络;射流出口前、后形成分别形成高压、低压区域,增大压差阻力的同时,也提升了升力。相比α= 12°工况,射流出口前的高压区面积、峰值增大,形成的低压回流区面积及回流区表面低压绝对值更大,故该种控制工况下的升力、阻力增幅更高。
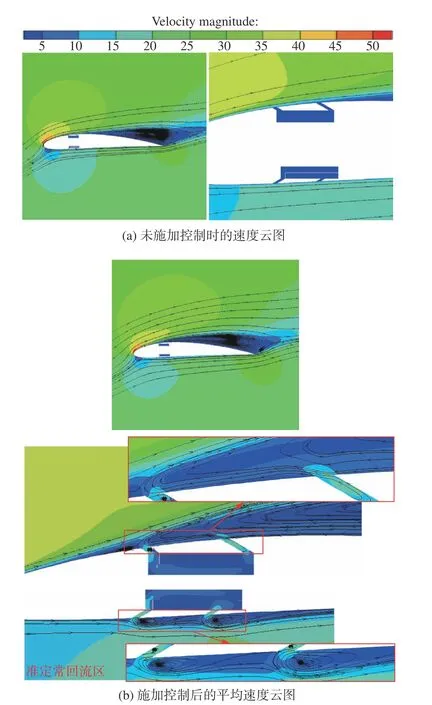
图14 控制前后平均速度云图对比(α = 16°)Fig. 14 Comparison of averaged velocity contours before and after the control (α = 16°)
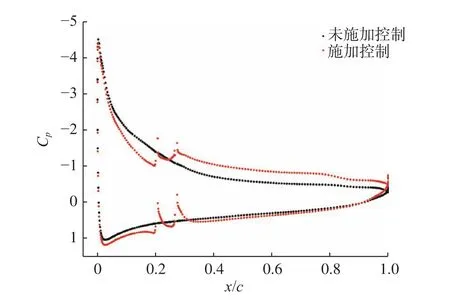
图15 控制前后平均压力分布对比(α = 16°)Fig. 15 Comparison of averaged pressure distributions before and after the control (α = 16°)
4 飞行试验验证
由上述分析可知,反向合成双射流激励器在小攻角下具有对飞行器航向姿态的控制潜力,故通过飞行试验对其控制能力进行验证。无人飞行试验平台参数、飞行控制方式与文献[20]所述一致。
反向合成双射流激励器结构如图16(a)、图16(b)所示,长、宽、高分别为60 mm、63 mm、17.5 mm,射流出口长度、宽度分别为50 mm、2 mm,两射流出口间距为16 mm,射流出射角度为150°。飞行试验时,设置激励器正弦波驱动频率为500 Hz(F+= 3.83),驱动电压为±170 V,通过热线风速仪测得距离出口1、出口2处1 mm的射流峰值速度分别为31.26 m/s和30.03 m/s,速度获取方法为取150个驱动周期峰值速度的平均值。该激励器布置于靠近左侧机翼翼尖20%的弦长处,沿吸力面、压力面展向均匀布置3个,单侧总长度为180 mm。详细布局方式如图16(c)所示。
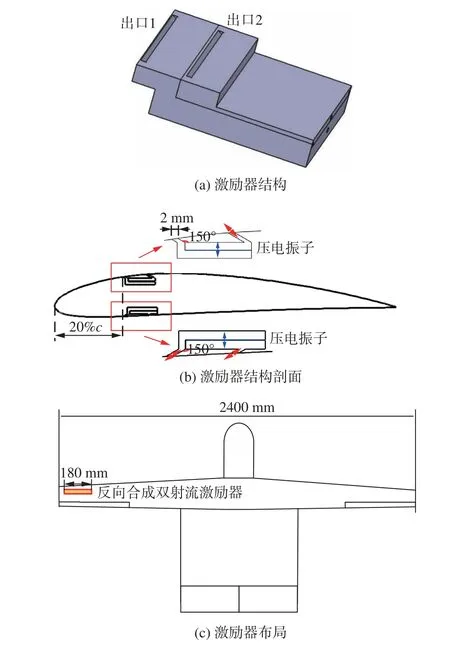
图16 反向合成双激励器结构及布局Fig. 16 Schematic and installation of the reverse DSJ actuators
飞行试验时,飞行速度为30 m/s,攻角为2°,激励器控制前后的飞行参数变化如图17所示,在C点开启激励器,舵面停止操控,在D点关闭激励器,舵面开始操控。在施加控制后,飞行器实现了向左偏航,并带有左滚转。这是因为,在左侧反向DSJ控制下,飞行器左侧机翼阻力增大,受到向左的偏航力矩,故会产生右侧滑,在该布局下,右侧滑导致了左滚转。左侧反向DSJ激励器的开启产生了向左的偏航角速度,并不断增大,最大偏航角速度可达9.01°/s,同时在该构型下,右侧滑也会产生向左的滚转角速度,促使飞行器向左发生滚转,且滚转角不断增大。上述飞行试验结果表明,反向合成双射流具有对飞行器巡航时航向姿态的控制能力。
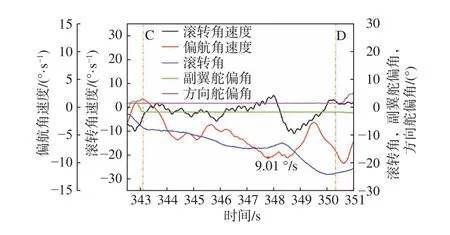
图17 左侧反向DSJ激励器控制下的飞行姿态参数变化Fig. 17 Flight attitude parameter variation under the control of the left-side reverse DSJ actuators
5 总结与展望
本文研究了布置于20%弦长处的反向DSJ对小攻角、大攻角下的翼型表面绕流流场的控制机理与气动控制规律,并通过飞行试验验证了其航向控制能力。具体结论与展望如下:
1)小攻角下,在施加反向DSJ控制后,阻力增大,升力略有减小,俯仰力矩基本不变。从流场及压力特征看,出口前由于射流的阻挡作用形成高压区,伴随着流向逆压梯度的增加,分别在两个出口后形成准定常低压回流区,致使前后压差阻力增大,但压力包络面积基本不变,故升力变化不大。若应用于单侧机翼,会产生偏航力矩及较小的同向滚转力矩,且与俯仰通道耦合较弱,故其在飞行器航向控制领域的应用潜力较大。飞行试验结果亦验证了其巡航时的航向姿态控制能力,可实现的最大偏航角速度为9.01°/s。
2)大攻角下,施加反向DSJ控制后,升力、阻力、低头力矩增大。从流场及压力特征看,反向DSJ控制除了会在射流出口前、后分别形成高压区、低压回流区外,还会使背风面流动提前分离,扩大分离区域面积,同时减小分离区内的压力值,扩大压力包络,增大阻力的同时,也会提升升力。若应用于单侧机翼,会产生方向相反的滚转、偏航力矩,削弱飞行控制的效果,同时会耦合俯仰力矩,增大了控制系统的设计难度。3)为实现反向DSJ航向控制的工程应用,下一步将通过风洞试验详细研究其气动控制规律,为建立基于反向DSJ航向控制的气动控制模型奠定基础。