基于LMS算法的自适应滤波器性能分析*
2022-01-06刘建涛姜海洋
刘建涛 席 闯 姜海洋
(沈阳辽海装备有限责任公司 沈阳 110000)
1 引言
滤波器研究的目的是设计和制造最佳的(或最优的)滤波器,减小期望频率信号的衰减,并阻止非期望频率信号通过,分为传统与现代滤波器,可通过软件或硬件实现[1]。本文将比较三种经典滤波器的滤波性能,并重点介绍LMS自适应滤波器的实际应用。
2 滤波器原理
2.1 经典滤波器
20世纪40年代,数学家维纳(Norbert Wiener)首次提出噪声是叠加于信号之上的,即加性噪声的概念:

其中,x(t)为实测值;s(t)为目标信号;v(t)为噪声信号。
为了还原目标信号,就需要进行滤波。其中模拟滤波器只能粗略的限定可通过的信号的频率范围,更进一步的滤波、平滑甚至预测等任务需要交给数字滤波器来处理,以下提及的滤波器均指代数字滤波器。
在离散数字信号的场合,设y(n)为期望输出,有:

一个典型的滤波系统具有如下结构[2]:

图1 滤波器组成
其中,ℎ(n)为冲激响应。
但由于滤波器自身性能的限制,以一个线性滤波系统为例,其实际输出为

2.2 维纳滤波器
依据最小均方误差准则,希望求得误差值平方的期望值最小。设误差e(n),真实值s(n),估计值,即:

最小均方误差为

设冲激响应h(n),有:

式中,Rxs(m)为互相关函数,Rxx(m)为自相关函数,即:

若这两个参数已知,即可由式(6)求得滤波器系统冲激响应。
2.3 卡尔曼滤波器
卡尔曼滤波器的描述建立在这样一个状态空间基础上:即认为系统噪声和测量噪声共同引起了实际误差,系统框图如下:

图2 卡尔曼滤波系统
由其思想可以看出,卡尔曼滤波器是在观测值和估计值之间进行折中。当估计误差较大时更依赖观测值,当上一次误差较小时便增加H的权重。
2.4 LMS自适应滤波器
LMS自适应滤波器同样采用最小均方准则,系统的闭环结构使其更适用于信号模型未知的情况,该系统结构如下[3]:
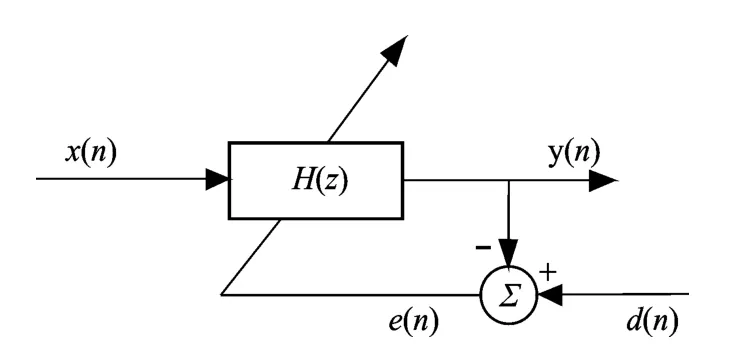
图3 自适应滤波器的结构
图中,x(n)为输入;y(n)为输出;H(z)为参数矩阵;d(n)为期望;e(n)为误差。通过e(n)对数字滤波器进行重新设置,使误差的均方插值最小。
当n时刻的输入x(n)进入到滤波器时,M阶滤波器输出为

其中ωm为第m个抽头线上的权值。
对ωm的自适应控制详细结构如图4所示。
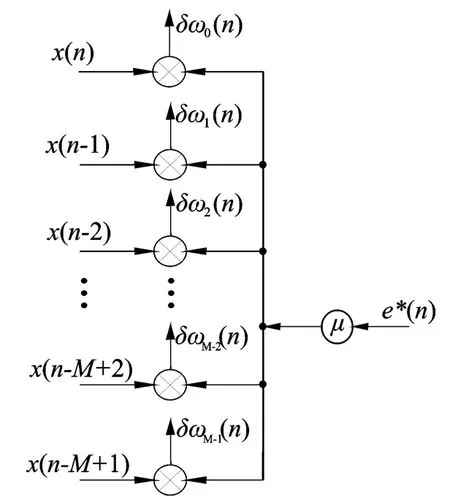
图4 权值自适应控制算法模型
图中,μ为步长因子(也称收敛因子)根据上图,有:

w为ω的向量形式。
μ的取值范围为

式中SMAX为x(n)功率谱密度的最大值。步长过大会降低滤波的精度,当μ取较小值时,LMS自适应滤波过程进行的较慢,但减少了失调的影响[4~6],需根据实际应用场景进行调整。
3 性能分析
3.1 仿真分析
为了检验两种滤波器算法在去噪应用中的滤波性能,利用Matlab对维纳滤波器和自适应滤波器进行模拟仿真实验。仿真结果如下:
以单位幅值正弦波信号叠加高斯白噪声为例,维纳滤波器阶数为100,相关信号长度为100时,结果如图5所示。
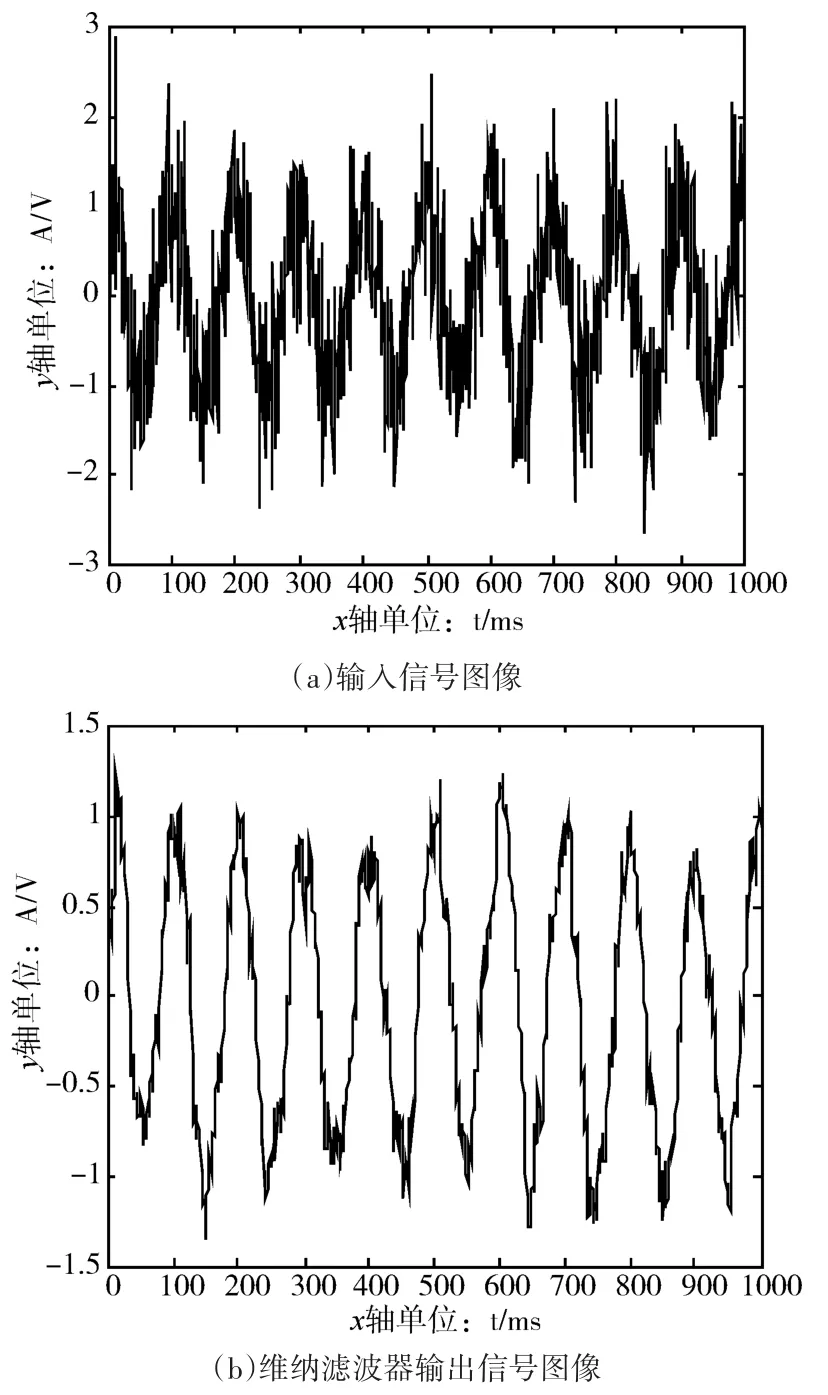
图5 维纳滤波器仿真
LMS自适应滤波器阶数为50时,结果如图6所示。
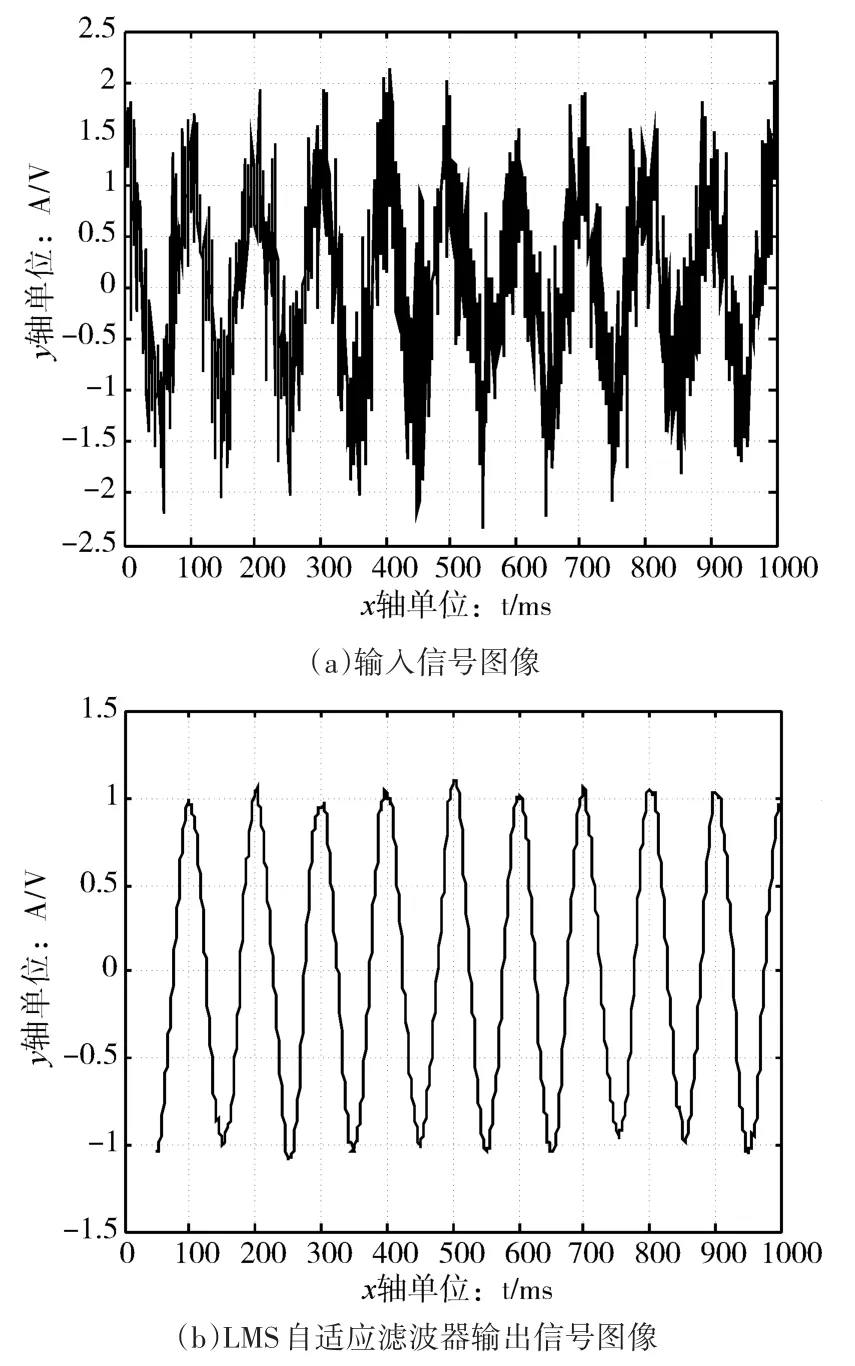
图6 LMS自适应滤波器仿真
比较上述维纳滤波器滤波结果可见,基于LMS算法的自适应滤波器对变化的信号反应更加灵敏,输出曲线相较维纳滤波器更加平滑,滤波效果更佳。图中未示出LMS自适应滤波器在前50个点的输出,这是因为当滤波点数小于阶数时,不能完全发挥出滤波器的能力。LMS自适应滤波器的输出与期望较为接近,与输入信号相比,获得了十分明显的滤波效果,输出与期望的误差的绝对值也会随信号幅值的增加而增加。
3.2 水池实验
为更直观观察LMS自适应滤波器的滤波效果,进行水池单频信号的接收实验,通过LMS自适应滤波器对接收信号进行滤波,结果如图7所示。

图7 实验滤波结果及误差
图7可直观看出,当期望信号已知时,随累积观测时长增加,LMS自适应滤波器的估计误差减小,滤波效果变好。
4 自适应LMS算法的应用
4.1 自适应均衡
避免多途影响系统性能,采用自适应均衡技术,对接收信号进行自适应均衡补偿处理,尽可能接近期望信号,消除码间干扰,解决传输环境不理想带来的失真问题[7~9]。
4.2 语音处理
不同环境噪声具有不同特性,需在已知语音信号频谱范围条件下,设计自适应滤波器,针对未知环境消除噪声干扰。基于LMS算法的自适应滤波器在语音信号处理中,具有较好的收敛性和良好的环境适应性,并且稳态误差小,广泛应用于语音系统中。
4.3 自适应回声消除
电话回声和声学回声是降低通信系统通话质量的主要原因[10]。LMS算法的快速收敛特性,可保证语音系统的实时性,是其在回声消除领域有广泛的应用先决条件之一。通过对回声路径的自适应分析,结合语音信号的自适应处理,可以有效抑制回声,降低回声信号被察觉的可能性,实现即时语音回声自适应消除。
4.4 自适应干扰对消
LMS算法收敛速度快,稳定性高,结构简单等优势,使其在需要干扰对消的军事、医疗、科研生产等方面,均有广泛的应用,例如天线阵列旁瓣对消、雷达干扰对消、降低设备电源干扰[11~13]等。
5 结语
维纳滤波器适用于输入特性已知且广义平稳的随机过程,使用全部的过去观测值完成这一“去相关”过程;卡尔曼滤波器还可适用于非平稳随机过程,特别适合对模型已知系统的实时预测,当应用于噪声较大系统时,预测结果将十分依赖观察值;LMS自适应滤波器更适合于对非平稳随机过程中变化的信号进行滤波,取得的结果明显优于维纳滤波器,其波形与维纳滤波器相比更平滑、更接近目标信号。
