一种目标航路实时异常快速判定方法*
2022-01-06张海瀛
张海瀛
(中国西南电子技术研究所 成都 610036)
1 引言
随着无线传感网络、全球卫星导航系统等技术和设备的发展,目标时空数据(如飞机、船舶轨迹等)的数据量日益增长,及时发现目标时空异常情况并给予实时告警,对于及时科学决策具有重要的意义[1~3]。“异常”一般是指观测到的事物与所期望事物有所不同的现象。时空异常判定的目的是在从时空数据中发现偏离正常模式的目标。目标时空异常情况的研究需要建立在正常模式建模之上,以此为标准,将观测到的数据与正常模式相对比,进而实现异常情况的判定。
一般来说,从目标时空信息来看,主要时空异常情况如图1所示,包括速度或航向等运动状态的变化、偏离正常路径、过于接近或进入违禁区域等[3]。本文主要研究目标位置超出历史或预设路径的异常情况判定,称之为“航路异常”。在此种异常情况下,目标的正常模式是其正常行驶轨迹,该轨迹可以预先设定,也可以从目标的历史活动数据中提取[4~6]。
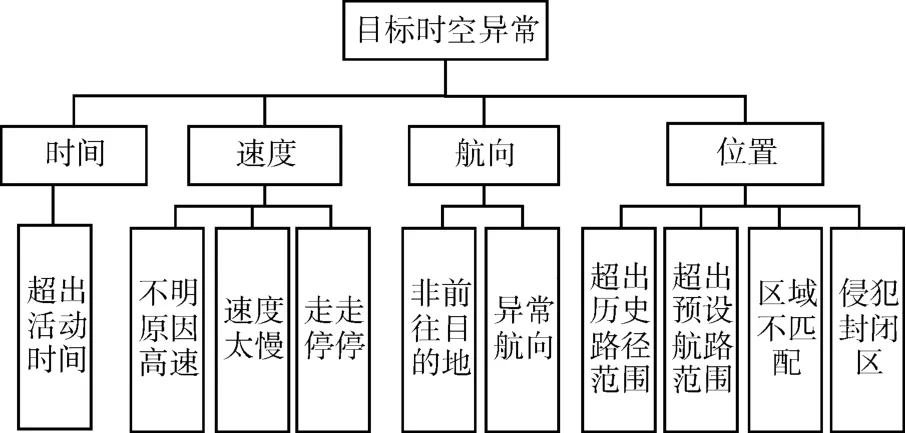
图1 目标时空异常模式
目前,目标航路异常判定模式包括在线实时和离线非实时两种,判定方法可细分为基于统计挖掘的方法[7~9]、基于距离的方法[10~13]和基于机器学习(包括神经网络)的方法[14~15]三大类。基于统计挖掘的方法主要面向离线非实时场景,旨在发现大规模数据中的异常目标,而后两类方法主要面向在线实时场景,侧重于目标异常情况的实时判定和告警。基于距离的方法,主要通过计算目标实时特征向量与正常模式下特征向量之间的距离来判断目标是否出现异常。基于机器学习的方法,主要利用决策树、支持向量机、贝叶斯网络等模型,自动学习复杂的数据结构、已有的异常和正常模式。
基于机器学习的方法是有监督方法,需要采集大量的目标轨迹数据,并人工标注异常和正常数据,构建训练集,以进行模型的训练,同时还面临样本不均衡问题。其中,基于神经网络的方法具有更强大的拟合能力,可对复杂异常问题进行建模,但是其所需要的训练集更大,学习到的模型难以解释,甚至还需要配备专用推理硬件,导致其应用场景受限。而基于距离的方法是无监督方法,主要从物理特性出发建模目标特征向量,无需构建数据集和进行训练,原理清晰,部署环境通用,在实际中得到了更加广泛的应用。
基于距离的方法,核心在于如何构建特征向量(可由位置、航速、航向、转角等组成),并快速衡量特征向量之间的距离。目前,无论是基于单维特征还是联合多维特征的距离方法[10~13],大都基于Hausdorff距离来度量特征距离,需要计算实时特征与每个参考特征之间的距离,时间开销较大,这严重影响着实时判定的效率。
针对该问题,本文围绕目标航路实时异常判定问题,提出了一种基于集合重合性的在线快速判定方法,并给出了阈值设定的启发式规则。该方法将实时轨迹相比于正常轨迹的偏离程度度量问题转化为地理网格集合间的重合性计算问题,具有更好的计算效率,更加适合于工程应用。
2 目标航路实时异常判定原理
2.1 任务定义与问题建模
其中,ak为集合元素对应的轨迹点数。当相似性参数小于设定的门限值时,则认为目标出现了航路异常。
一般地,从GPS等定位设备采集的目标轨迹点可以用p(x,y,v,t)来表示,其中x表示经度,y表示纬度,t表示时间,v表示速度。因此,目标轨迹T可以描述为目标轨迹点的有序序列:

其中,pi表示目标轨迹的第i个轨迹点。在下面的描述中,本文用Ttypical表示表示目标正常轨迹,Tr表示目标实时轨迹。
一般来说,同一目标会存在多条正常轨迹,例如车辆、飞机、船舶等目标在执行不同任务时会形成不同的正常轨迹。本文重点关注如何计算目标实时轨迹与正常轨迹之间的偏离程度,因此,不失一般性,本文以目标仅有一条正常轨迹时的情况作为研究对象。
2.2 偏离指标计算方法
本文基于Geohash编码[16],根据目标实时轨迹点落入正常轨迹周边区域的比例来判断是否出现航路严重偏离情况。
假设截止到当前时刻,目标共有m个轨迹点,则其轨迹序列为
新的个税法采用了按年纳税,工资薪金个税预扣预缴采用了累计预扣法,并且还要在年终过后汇算清缴。收入的忽高忽低,对全年应缴纳的个税总额不产生任何影响。

针对这种问题,不仅需要引航部门强化对于引航人才的有效培养,不断扩大人才招聘范围,加强与相关专业院校之间的有效合作,还需要地方政府加强在相关教育引导工作中的财政投入,加强教育管理,鼓励相关院校强化引航相关专业人才的培养与教育工作,为船舶靠离泊航行安全提供更多的人才保障。另外,针对当前各引航机构在人才队伍建设及管理方面的不足,也要求引航部门优化人才管理制度,减少引航员的工作压力与工作强度,提高工作待遇,保证引航员的良好情绪。

基于上述参数配置,偏离指标随时间的变化情况如图4所示。需要说明的是,偏离指标越小,表示目标实时轨迹偏离其正常轨迹的程度越严重,即出现航路异常。
在对目标实时轨迹进行Geohash编码时,统计并记录每个集合元素对应的实时轨迹点数:
合同约定的内容主要站在有利我方角度考虑,原则是我方权利越多越好,义务越少越好。并视具体合同而设置应有的条款;合同履行条款的设置原则:合同相对人履行在先,我方履行在后。在约定我方付款期限时,要充分留足公司报销流程时间,以免不能及时付款而造成违约。

假定目标的正常轨迹Ttypical对应的GeoHash编码集合为set(Ttypical):
6)相关教育部门需要进一步落实与完善体教结合机制,让有潜力的学生在大学校园里,能够接受高水平、系统的训练,以为我国女篮在未来的发展输送更多的人才。

基于目标实时轨迹和正常轨迹GeoHash集合数据,定义目标实时轨迹与目标正常轨迹之间的偏离指标计算公式,如下所示:
目标航路实时异常判定的任务是:实时判定目标是否偏离其正常轨迹,并在严重偏离时给出告警提示。该任务的关键是如何快速度量目标实时轨迹偏离正常轨迹的程度。本文通过将偏离程度度量问题转化为“地理网格集合间的重合性计算问题”,实现偏离程度的快速计算。
再次,培养多种情趣,用精彩的业余生活调节情绪。要有情感寄托的方法,合理地对自己不良情绪转移。利用好教师的假期做好休息,行万里路如读万卷书,游览祖国名山大川,感受不同的生活方式,开阔视野,开阔胸襟,就能学会包容学会理解,就能在教育中营造和谐教育环境。学校及工会组织,在全体教师中多组织喜闻乐见的、丰富多彩的有益的体育活动和其它活动,让教师在各种活动中和谐交往,增进互相了解,从而使教师身心得到放松,保持旺盛的精力和饱满的激情投入到教育教学中去[4]。
(2)草海湿地沉积物重金属元素除Cu、As平均含量未超过贵州省土壤元素背景值,其他5种重金属均超出贵州省土壤背景值含量,尤其是Cd,高达背景值21倍,可见草海存在严重的Cd污染。根据潜在生态危害指数的综合分析可知:Cr、As、Pb和Zn污染较严重,其中Cd和Hg污染最严重,已达到极强的潜在生态危害程度。
需要注意的是,在目标航路异常实时判定过程中,目标的轨迹数据是不断更新的,若积累的目标轨迹点过多,则容易降低偏离指标对航路异常的敏感性。因此,在实际中通常截取距离当前时刻一段时间内的有限轨迹点进行偏离指标计算。本文按指定长度Lp,选取截止到当前时刻的目标实时轨迹点。
3 目标航路实时异常判定流程
本文提出的目标航路实时异常快速判定方法处理流程如图2所示。
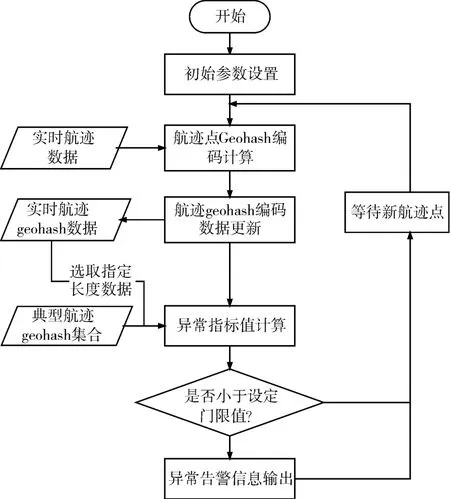
图2 目标航路实时异常快速判定流程
3.1 初始参数设置
在实施目标航路实时异常判定时,需要设置的初始参数包括参与计算的目标实时轨迹序列长度Lp、目标轨迹点GeoHash编码长度Lg和异常告警门限值EL,这些参数可根据实际情况设置。例如,对于参与计算的目标实时轨迹序列长度Lp,可综合考虑时间监控窗口、目标实时更新速率等因素来确定;对于GeoHash编码长度,若要求目标实时轨迹偏离正常轨迹的平均距离 ≤3km,则Lg可设置为5。特别地,对于异常告警门限值EL的设定,可按照以下启发式规则进行:
之所以选择在接受理论视角下看文化缺省的翻译,是因为在接受理论的核心概念中就包括“视域融合”,“未定点”等概念,这种“未定点”就是作者预留给读者引起共鸣的,而文化缺省就是这种有意安排的“未定点”中的一类,同时它在文化构建中也起着举足轻重的作用,所以研究关于文化缺省翻译的问题在以读者为导向的阅读过程中会更好地促进读者对于不同文化的欣赏同时又在其接受范围内,不会影响作者与读者的交流,从而使得跨文化交际更好更有效地进行。
1)对于完全禁止目标实时轨迹点偏离正常轨迹指定范围的情况,可设置EL值为1;
两个目标的实时轨迹和正常轨迹如图3所示,从图中可以看出,空中目标和海面目标的实时轨迹与正常轨迹均存在严重偏离情况。
例如,若EL设置为0.8,则允许至多20%例外点出现,也就是说当80%以上的轨迹点落入正常轨迹区域时,则认为该目标没有出现异常。
3.2 偏离指标计算
1)根据设定的GeoHash编码长度,提取目标正常轨迹编码集合中每个元素的前Lg位编码,形成参与计算的计算轨迹GeoHash编码集合。需要说明是,该操作在整个实时判定过程中,仅需进行一次,甚至可以提前将正常轨迹编码集合存储到相应的数据库中,在使用时仅进行一次读取操作即可;
2)根据设定的GeoHash编码长度,计算目标每个实时轨迹点的Geohash编码,并在设定的轨迹序列长度Lp约束下,形成参与计算的实时轨迹Geohash编码集合,记录每个集合元素对应的实时轨迹点数;
我曾听说何副书记原在外地因作风问题才调到这儿来的。对领导干部这种“换地方”惩罚法不理解,只上不下,犯了错误就换个地方,就如小孩尿炕,把这床褥子尿了,再换一床,结果弄得床床都有臊气,使人近前不得。这次乡里惩治腐败,像往常一样,何副书记只敷衍一下。中央让干点啥,到县乡两级就松劲了。就像往水里扔石头,中心激起的水浪高,然后向四周扩展开去,越传得远越低,最后波平浪静。我为女站长担起心来,但转念一想,何必多管闲事!这女子如此风流,倘若是周瑜打黄盖——我们岂不成了猪八戒照镜子?我正想回家,巴克夏却说:“咱别回去了,反正也不太冷,就在办公室睡吧!”
3)基于目标实时轨迹和正常轨迹的Geohash编码集合,根据式(6),完成偏离指标Rs的计算。
3.3 异常判定
根据设定的异常告警门限值,当以下条件成立时:

1)参与计算的目标实时轨迹序列长度Lp,设置为50;2)目标轨迹点GeoHash编码长度Lg,设置为5;3)异常告警门限值EL,设置为0.7。
4 实验与结果分析
由于本文所提方法基于目标实时轨迹偏离正常轨迹的程度来判断目标是否出现航路异常,不涉及复杂的特征工程,实现原理清晰、可解释,具有一般性和普适性,因此不需要利用大量数据进行实验分析。
利用ArcGIS软件平台,以更新后的荣成市第二次全国土地调查数据为本底数据,以图斑为最小单元,将收集到的各项数据进行空间叠加分析及属性空间化。参照相关技术要求计算各项指标数值。
4.1 本文方法有效性分析
为了验证所提出方法的有效性,本文利用某典型空中和海面目标实测轨迹数据进行实验分析,对目标轨迹数据进行了脱敏处理:通过对其真实轨迹进行偏移和重采样作为其实时轨迹,并对实时轨迹进行偏移和重采样等处理,得到目标正常轨迹。两个目标的实时轨迹参数如表1所示。
其中,HU(Hounsfield Unit)为三维空间中每个单元对于二维图像的CT值,ρash为灰度密度值,E为相应位置单元材料的弹性模量,单位为MPa。通过Mimics材料赋值模块,完成骨骼网格模型的非均匀单元赋值。
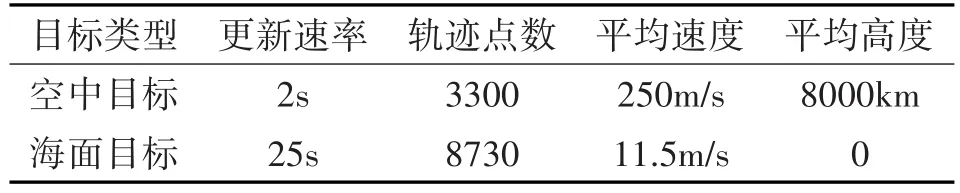
表1 目标实时航迹参数
2)对于允许目标实时轨迹点出现例外的情况,可根据能够接受的例外轨迹点数量占参与计算的目标实时轨迹序列长度Lp的比例来计算。
根据实验要求和经费情况可以选择自己拍摄和专业公司拍摄:自己拍摄成本低、时间自由、可反复拍摄修改,但画面质量不如专业公司拍摄得清晰;专业公司拍摄画面更精致,但成本更高,修改、重拍比较费事。因此,可以自己简单地拍摄,操作复杂的请专业公司拍摄。
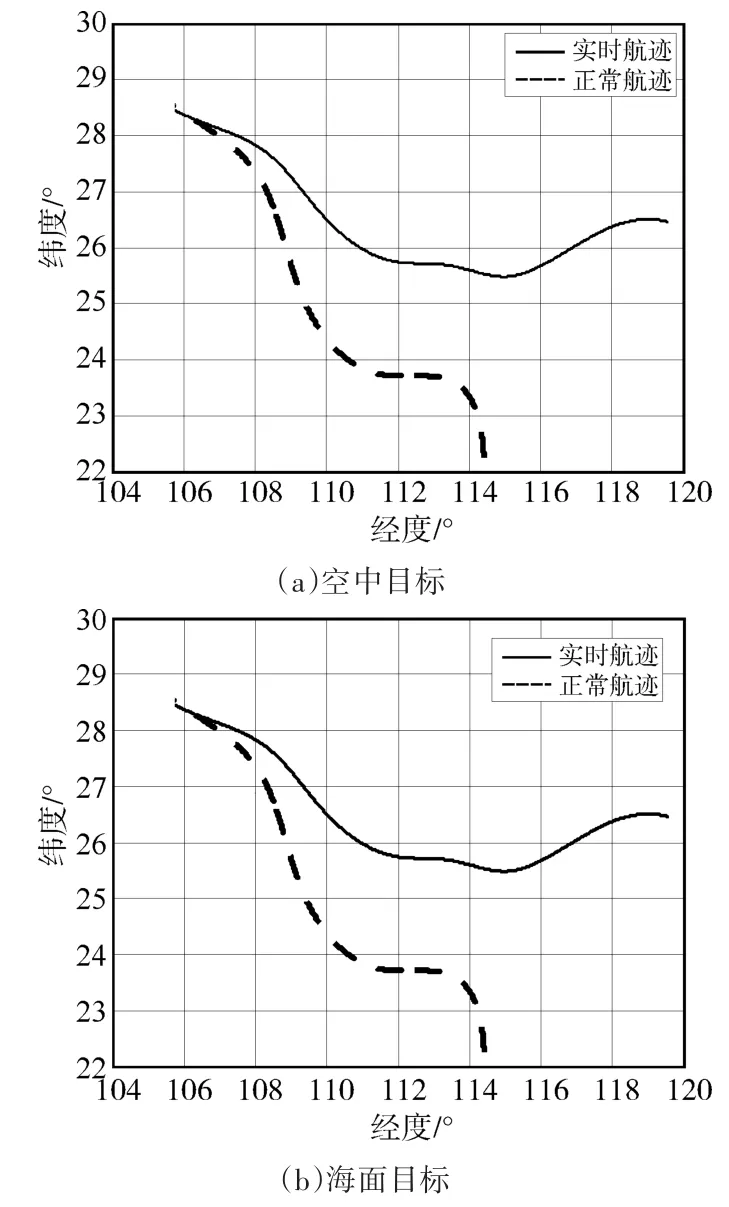
图3 目标实时轨迹与正常轨迹示意图
基于目标航路实时异常判定流程,计算目标实时轨迹与正常轨迹间的偏离指标,采用的初始参数配置如下:
则判定目标出现航路偏离异常,并输出告警信息。否则,则直接返回,等待新轨迹点的输入。
其中,n为转换后集合元素个数为第i个集合元素。需要说明的是,在进行实时轨迹Geohash编码时,编码长度Lg可根据监测需求给定。
日前,衡阳市不动产登记中心召开会议,通报了全国不动产登记窗口作风问题的5个典型案例,同时也通报了群众反映的该中心个别科室干部有可能收受红包、参与吃喝宴请的现象,并要求各科室自我对照、自查自纠,坚决防止通报事件和群众反映的现象发生。该中心权籍调查科科长在参加完上述会议后,召开了科室内部会议,会议结束后,便由日常负责撰写会议纪要的调查科科员草拟了上述的这份承诺书。
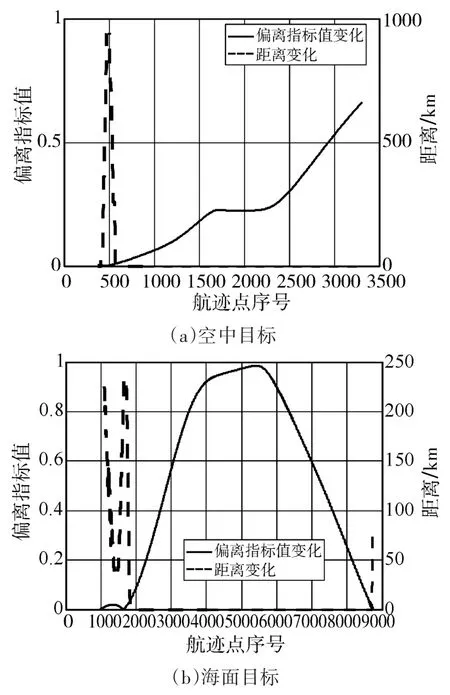
图4 目标轨迹相似性指标随时间的变化情况
从图4中可以看出,无论是空中目标还是海面目标,当目标实时轨迹开始偏离正常轨迹时,按照设定的门限值,可以很容易判断出目标出现了航路异常;随着目标开始慢慢回归正常轨迹,其相似性指标也逐渐提高,预示着偏离程度越来越小,与目标实时轨迹与正常轨迹之间的距离变化趋势相吻合。
为了定量评估所提方法的有效性,本文采用精确率、召回率和F1值等三个常用指标[17]进行评估。本文通过对目标实时航迹与正常轨迹间距离设置门限值来得到真值数据。由于本实验中Geo-Hash编码长度设置为5,因此距离门限值设置为2.5km,即当航迹间距离大于2.5km时,则认为目标出现异常。基于预测数据和真实数据,评估结果如表2所示。

表2 多指标评估结果
从评估结果可以看出,本文方法在目标航路实时异常检测方面,具有较高的判定准确率。
4.2 计算效率对比分析
在实际中,基于Hausdorff距离的经典方法应用最为广泛,在原理上与本文所提方法相同,仅偏离指标的计算方式不同。为了验证所提方法计算的高效性,本文利用上述数据,对所提方法与基于Hausdorff距离的经典方法的计算效率进行对比分析。
首先,从理论方面来看,由Hausdorff距离的定义可知,针对目标的每个实时轨迹点,基于Hausdorff距离的经典方法需要计算实时轨迹点与每个正常轨迹点之间的距离,然后取最小值作为该点到正常轨迹的距离,最后与设定阈值比对实现航路是否异常的判定,因此其计算量与正常轨迹的点数正相关;而本文所提方法,仅仅需要计算每个实时轨迹点的GeoHash编码,然后判断该编码是否出现在正常轨迹编码集合中即可实现航路是否异常的判定。因此,直觉上本文方法具有更高的计算效率。
根据以上论述,利用时间复杂度分析理论,对两种方法一次判定中,关键步骤的最差时间复杂度进行分析,如表3所示,其中M为正常轨迹原始长度,N为正常轨迹编码集合大小,且N远小于M。
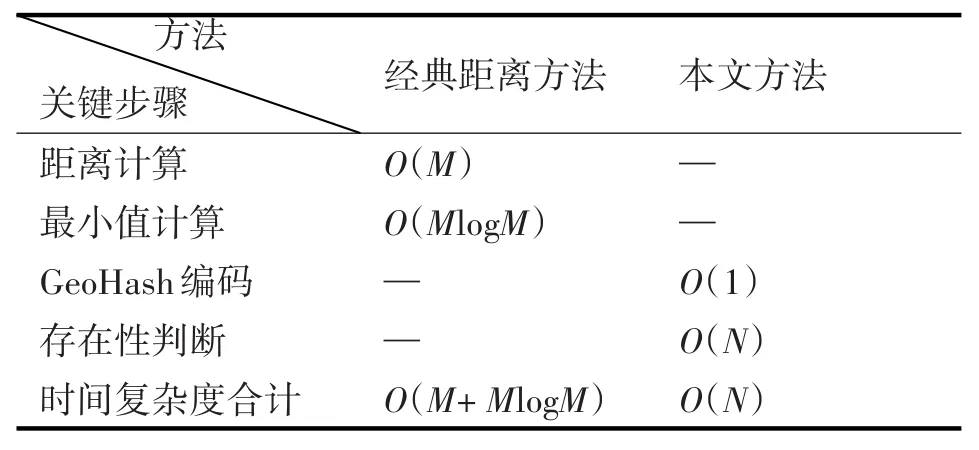
表3 时间复杂度分析结果
从表3中理论分析结果可知,基于Hausdorff距离的经典方法的时间复杂度要高于本文所提方法。需要注意的是,实际的运行时间还与距离计算时间、GeoHash编码时间、运行环境配置等因素有关。
接下来,本文以实验方式,对两种方法的计算效率进行对比分析。实验环境配置如表4所示。
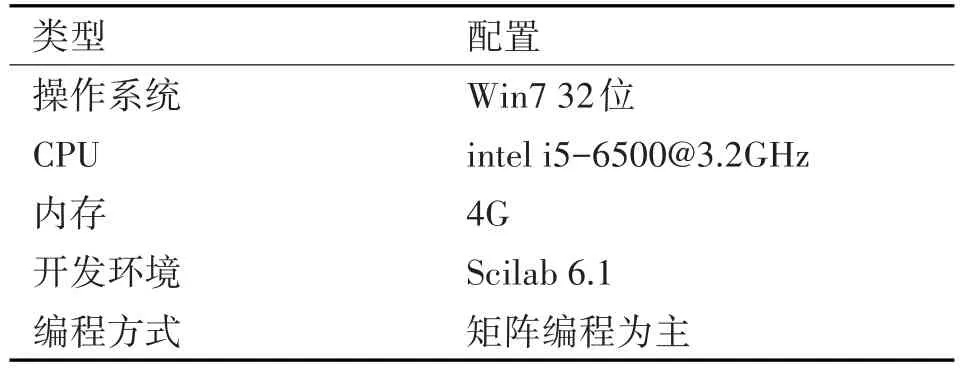
表4 实验环境配置
为了减少统计的随机性,本文对每条数据,进行10次实验并取平均值作为实验结果。两种方法全面完成目标航路实时异常判定的时间统计结果如表5所示。

表5 两种方法实测时间对比
从表中可以看出,本文方法具有更高的计算效率,并且目标轨迹点数越多,计算效率提升越明显。
5 结语
针对目标航路实时异常判定问题,本文提出了一种基于集合重合性的快速判定方法,将实时轨迹相比于正常轨迹的偏离程度度量问题转化为地理网格集合间的重合性计算问题,并给出了阈值设定的启发式规则。实验结果表明,该方法能够实现目标航路异常的实时判定,适用于不同类型目标,并且具有更好的计算效率。
本文方法是一种面向实时监测场景、非监督式的航路异常判定方法,具有实现简单、可解释性好、无需标注数据、计算效率高等特点,适合于监控目标明确、目标存在预设轨迹或经典轨迹的监控场景,具有一定的工程应用价值。但是,面向目标经典轨迹未知或难以挖掘、多类型异常综合分析、大数据样本分析等复杂场景,具有强大规律挖掘和数据拟合能力的基于深度神经网络的目标异常判定方法是未来的主流发展方向。此外,将深度神经网络与气象、水文、航道拓扑结构、航行规则等知识相结合的情境分析方法将是更加前沿的研究方向。