基于LabVIEW的断路器操动机构运动速度检测
2022-01-05段晓辉王文博陈培军马丽婷库照宇董华军
段晓辉,王文博,陈培军,,马丽婷,库照宇,董华军,
(1.平高集团有限公司,河南 平顶山 467000;2.大连交通大学 机械工程学院,辽宁 大连 116028)
工业用电量的提高对电力系统的工作可靠性提出了更高要求。断路器作为电力系统的保护和控制元件,其开断能力是该领域学者的重要研究目标[1-3]。研究断路器开断能力的主要问题之一在于如何精确计算断路器的分、合闸速度,实现开关成功开断[4-5]。操动机构作为断路器的储能、控制及力传递元件,承担着断路器能否成功开断电流的重要任务[6]。操动机构的机械特性是完成该任务的关键因素,而操动机构的运动速度又是研究其机械特性的重点指标,需对其进行重点研究。
目前测量操动机构运动速度的方法可以分为传统方法和图像处理方法。传统方法包括传感器检测法和外加电容分析法:外加电容分析法受到外部环境影响较大;传感器法的最大测量误差约为0.1 m/s,可以较为精准地测量触头运动速度,得到了较为广泛的应用。陈建平[7]等通过在操动机构的传动轴上安装位移传感器的方式,获取了操动机构的运动速度;但该方法在实验时采用将传感器定位在与操动机构传动轴连接的导向杆上,间接获取传动轴的运动速度,难以保证实验结果的精确度。张鹏鹤[8]等提出一种基于电阻传感器技术的操动机构速度采集方法,不仅测量精度有所提高,同时也解决了无法安装传感器的弊端;但该方法由于操动机构各部件间存在配合误差,难以保证测量精度。
综上可知,传统的检测方法难以精确检测操动机构运动速度,而图像处理方法利用高速相机对操动机构运动图像进行采集、分析,可以获得较高精度的测量结果。董华军[9]等用电荷耦合器件(charged coupled device,CCD)相机对操动机构运动图像进行采集,应用MATLAB对采集图像进行处理,通过边缘提取来分析断路器分闸速度;但该方法采用C语言编程,程序复杂,运算时间长,不易掌握。
针对上述问题,本文基于LabVIEW,结合图像化编程语言,提出一种针对操动机构运动序列的图像处理方法,对操动机构序列运动图像进行图像预处理和边缘检测,一方面能够实现操动机构运动过程中关键信息的采集,提高图像处理精度,另一方面可以节省时间,简化程序。
1 实验方法及流程设计
1.1 实验设计
断路器中操动机构的速度检测一般分为图像采集与图像处理2个步骤。
实验室中进行图像采集时,采用的高速相机按照图像传感器的不同主要分为以下2种:第1种为采用金属氧化物半导体(complementary metal oxide semiconductor,CMOS)材料作为图像传感器的互补CMOS高速相机;第2种为利用光学器件作为图像传感器的CCD高速相机。CMOS高速相机具有采集速度快、结构集成性高、功耗低、图像可靠性高、设备性价比高、抗干扰能力强等优点,本实验选择CMOS相机进行图像采集。
本文通过CMOS高速相机对操动机构运动状态进行图像采集,并基于LabVIEW平台对其动态图像进行处理。所使用的CMOS高速相机为德国制造的MotionPro型高速相机,主要参数为:最大分辨率1 280×1 024;最大帧速3×105帧/s;数据位数分别为8 bit、16 bit、32 bit;最大分辨率下的帧速为1 040帧/s。
具体实验过程大致分为4步:①运用合成回路控制系统控制实验设备开始进行实验;②运用CMOS高速相机对操动机构运动图像进行采集;③利用图像处理模块对运动图像进行预处理及边缘检测;④提取出运动图像的重要信息。
在以合成回路为基础进行开关分合实验时,要求实验回路具有等价性,即实验合成回路所产生的电压、电流等实验条件要与断路器在实际应用中的条件等价。
在实验时,需要实时监测和控制合成回路的充电电流和电压、真空开关开断短路故障的电弧电压、电容充电电压等参数;因此,在进行合成回路实验时,其控制系统非常重要,在实验前应先对控制系统进行调试。控制系统的调试工作主要包括:操动机构能否正常工作;开关系统能否成功开断;电流源能否正常进行充、放电。
在合成回路控制系统调试完毕后,可以进行实验,通过高速相机采集操动机构的运动图像。具体过程如下:①启动CMOS高速相机控制软件,将高速相机初始化后,设置相机模式为图像采集模式;②设置延时时间,触发高速相机开关,开始进行图像采集;③操动机构经过延时时间后开始动作,至动、静触头分离,高速相机采集结束;④关闭高速相机,为下一次实验做准备。
1.2 分析程序设计
LabVIEW是一款由美国NI公司研发的虚拟仪器平台,该平台应用G语言编程,通过简单易懂的图示及连接线的方式来创建、编写复杂的实验仪器操作程序[10]。LabVIEW具有强大的硬件系统,可完成不同要求的数据采集功能,具有多终端和多平台、面向对象的灵活性等特点,为中小型企业特别是高校等机构进行实验研究节省大量资金。
NI Vision Builder AI(VBAI)模块是LabVIEW提供的图像处理模块。该模块由图像处理助手(Vision Assistant)、图像滤波(Image Filtering)、边缘检测(Edage Detection)等组件构成。图像处理助手主要包括图像导入、灰度化、二值化等功能。在图像滤波及边缘检测处理包中提供了高斯滤波、中值滤波、Laplacian边缘检测等多种图像处理函数模型。
本文通过CMOS高速相机与LabVIEW软件的结合来搭建图像采集系统。整个实验系统的硬件结构以灭弧室为核心,通过电流源、时序控制回路、操动机构及电流源投入开关的协同作用来控制真空开关的分合闸运动。利用高速相机对开关分闸过程中的操动机构运动图像进行采集。图像采集完毕后,将采集的图像导入LabVIEW中进行分析处理。基于LabVIEW设计了一套操动机构运动速度检测系统,该系统具体流程如图1所示。

图1 操动机构运动速度检测系统流程
2 图像处理
2.1 初始化
初始化模块主要包含测量参数初始化、控制元件复位、界面数据初始化等。LabVIEW能够自动创建带有实验时间和数据保存路径的文件。通过初始化设置对实验所有参数赋值,主要包括采集参数、实验类型、实验人员及单位信息等[11-12]。在实验类型中选择图像处理模块。
2.2 操动机构运动图像导入
在操动机构进行分闸操作时,应用CMOS高速相机对其运动过程进行图像采集。由于结构的限制,直接对操动结构进行图像采集存在一定困难,而凸轮结构作为操动机构的运动组件,其运动状态能够直接反映操动机构的运动状态,因此,本文针对操动机构中凸轮的运动状态进行采集与分析。
实验过程中,将采集的操动机构凸轮结构的运动图像导入到NI Vision Builder AI处理模块中(如图2所示),并对其进行初步分析。
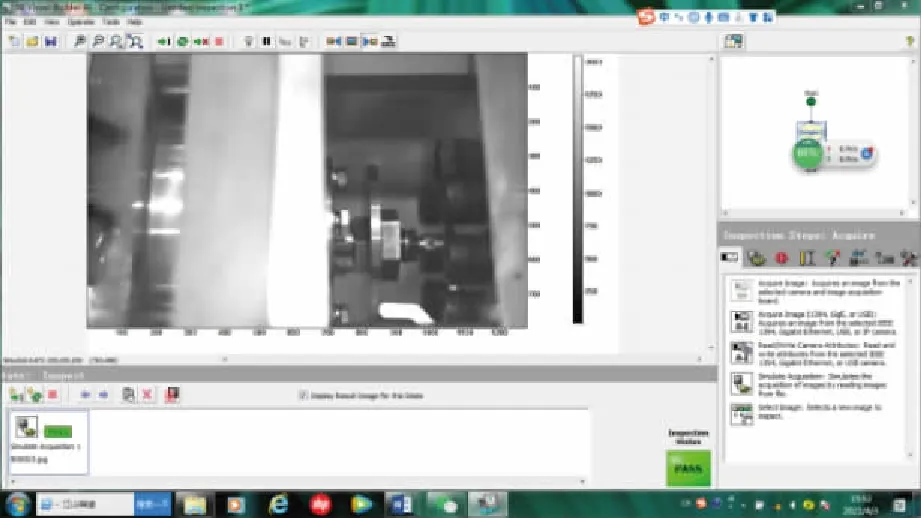
图2 NI Vision Builder AI工作界面
经分析发现,操动机构的运动模式在10 ms的分闸周期内呈现无规律的往复运动,该现象对精确定位操动机构实时位置产生了一定程度的影响;因此,若想精确地获取操动机构凸轮结构的实时位置信息,需要对图像进行进一步分析处理。
2.3 图像灰度化
NI Vision Builder AI模块基于8 bit或16 bit图像进行图像处理,因此需对获得的32 bit图像进行灰度化处理。
通过NI Vision Builder AI模块中的Vision Assistant处理包,对图像进行灰度化处理,处理后的图像如图3所示。

图3 灰度化处理后的图像
2.4 图像降噪处理
在采集操动机构运动图像过程中,采集环境、数据传输、脉冲电流、信号转换等实验条件的影响会产生噪声,因此在进行边缘检测前,需要对操动机构图像进行滤波处理。
NI Vision Builder AI处理模块提供低通滤波、均值滤波、高斯滤波、中值滤波等多种图像滤波方式。实验证明,操动机构图像有随机分布的黑、白像素点,即椒盐噪声(脉冲噪声),针对该种噪声类型,选用中值滤波进行滤波处理效果最好。中值滤波是一种常用的非线性滤波方法,也是图像处理技术中常用的预处理手段[13],其基本原理为:
(1)
式中y为序列x1,x2,…,xn的中值。当选定邻域为一维时,中值滤波为一个含有奇数像素点的邻域,邻域中心像素点的像素值用中值代替。
这种滤波方式能够在有效平滑脉冲噪声的同时保护图像尖锐的边缘,对操动机构图像的边缘信息有保护作用。
2.5 边缘检测
图像边缘是图像的重要特征之一。边缘检测是图像处理中必不可少的步骤,可以保留图像中的重要信息并消除无关信息,大幅降低数据量,有效提升分析效率。
本实验需要通过边缘检测提取凸轮图像的上、下边缘,通过上、下边缘的实时距离计算动触头的实时位置。边缘检测技术的基本原理是首先应用边缘增强技术对图像的边缘进行加强,然后通过设定阈值来定义边缘强度,最后提取出边缘点,构成边缘点集。NI Vision Builder AI处理模块所提供的边缘检测算子主要有Laplacian边缘检测算子、Prewitt边缘检测算子、Sobel边缘检测算子、Robert边缘检测算子。
Sobel、Prewitt边缘检测算子可以有效地增强图像沿水平和垂直方向上的灰度变化,但检测精度较低[14-16];Robert边缘检测算子是一种利用局部差分算子寻找边缘的检测算子,对具有陡峭噪声的图像处理效果较好,但其提取的边缘信息较细,会出现边缘信息缺失现象[17];Laplacian边缘检测算子的特点是边缘检测更加连续、准确和清晰,能有效避免伪边缘的出现[18-19]。因此本实验选用Laplacian算子对操动机构图像进行处理。
Laplacian算子为二阶微分算子,利用边缘点的二阶导数为0的原理进行边缘检测。在检测过程中首先应用运算公式找到指定图像中的边缘信息,然后以灰度值0作二值化处理,最后消除图像内部像素点,生成连续的图像边缘。Laplacian算子的公式为
(2)
将式(2)转化为卷积核可得:
(3)
式中:Δf1为基础Laplacian算子;Δf2为精确的Laplacian算子。
由式(3)可知,公式中心点的系数为正,其余相邻系数为负,系数总和为0。当图像中出现1个灰度值高的像素点,利用Laplacian算子进行边缘检测后,能够实现边缘强化。
在实验过程中发现,选用传统的3×3矩阵形式的Laplacian边缘检测算子对操动机构图像进行边缘检测,检测到凸轮机构边缘并非理想中的实验结果。经分析发现,主要原因为凸轮机构的亮度与周围环境亮度相差较小,导致部分凸轮边缘结构消失,无法准确显示边缘位置。为使实验结果更加精确,利用LabVIEW的直线拟合功能对凸轮结构的边缘进行拟合,拟合结果如图4所示。

图4 边缘拟合结果
2.6 实验数据分析
断路器分闸速度计算的基本原理是:采用几何约束的标定算法对图像位移与实际位移进行标定。在开关分断之前,利用角点检测方法标定静触头的位置。在真空开关触头分闸过程中,利用高速相机通过可视化玻璃窗口对触头分闸的序列图像进行高精度采集。通过NI Vision Builder AI模块中的边缘检测算法跟踪序列图像中动触头的位置,计算相邻2帧电弧图像中动触头的位移差ΔS,设相邻2帧电弧图像的时间间隔为t,用帧间平均速度代替触头瞬时运动速度v,即
v=ΔS/t.
(4)
将相邻帧中对应匹配点的纵向坐标值做差,并取所有差值的均值,即得到了像素单位帧间触头运动的位移N,利用式(4)将像素单位位移转化为长度单位的实际位移S,
(5)
式中:D为触头直径;N′为动触头像素个数。
依据分闸弹振产生的原因,进行平均分闸速度与分闸弹振的关系推断。设x为动触头运动到额定开距的位置点,vx为触头处于点x时的速度值。根据能量守恒定律可得
(6)
式中:m为动触头质量;X为动触头与额定开距点的相对位移(分闸弹振幅度);k为分闸弹簧的弹性系数;WZ为操动机构转换能量。
采用上述分析方法,观察1个分闸周期内采集的370帧图像,凸轮结构发生运动集中在第149帧至第169帧图像间。故选用第149帧至第169帧共20帧图像,检测凸轮位置,得到21个速度值,在速度的起点和终点添加2个大小为0的速度值,并应用Orange数据处理软件对这23个数据点进行速度曲线拟合,拟合结果如图5所示。
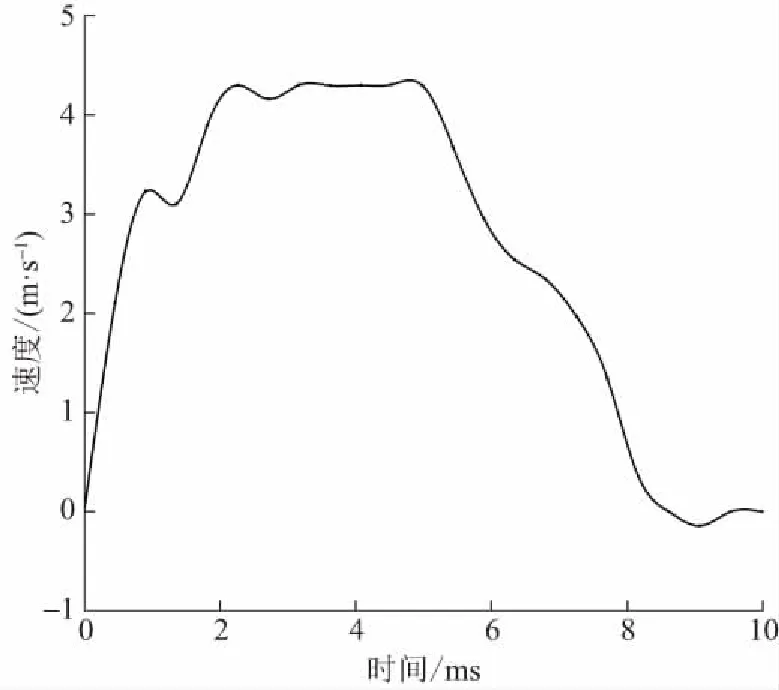
图5 拟合速度曲线
由图5可知,操动机构外部凸轮在分闸过程中的运动并非线性变化,即操动机构的合闸过程是一个非线性运动,其分闸速度可以分为3个阶段:第1阶段为加速阶段,在0~2 ms内速度不断提高,中间出现了1次明显的跳动;第2阶段为稳定阶段,在约2~5 ms内速度相对稳定,伴随不规则抖动;第3阶段为减速阶段,在5 ms之后速度呈波动性下降,直至降为0。
操动机构在运动过程中,运动速度由0急速升高至峰值,当操动机构运动速度趋于稳定时,速度维持在4.3 m/s附近振荡,振荡时间约为3 ms。凸轮结构因为加速度过快的原因产生了抖动现象,也因此导致速度在上升过程中出现跳跃现象。在速度下降过程中,运动速度由4.3 m/s快速下降至2 m/s及以下,导致操动机构的运动状态不稳定,出现回弹现象。
综上可知,操动机构在分闸阶段的运动是一个非线性运动。分闸初期,在外力作用下运动速度迅速增加至最大值,然后在速度为4.3 m/s附近振荡约3 ms,进入减速阶段,速度迅速降为0。操动机构在10 ms内运动速度急剧变化,导致其自身会产生一定幅度的振荡,进而导致操动机构运动状态不稳,出现回弹现象。
3 结论
本文针对操动机构运动速度检测问题,提出了一种基于LabVIEW图像处理技术来获取速度曲线的方法,并对其进行分析,得到以下结论:
a)基于LabVIEW提出速度检测方法,可以精确处理操动机构运动图像,获取凸轮结构的实时位置信息,为分析断路器分闸速度的演变过程提供理论依据。
b)操动机构在分、合闸期间的运动并不是线性变化的,受到自身振动的影响,其运动速度会出现一定程度的波动。
c)该方法可以实现瞬时响应,当操动机构运动速度出现波动时可以及时采集相关数据,有效避免出现数据丢失的现象。
