三自由度踝关节康复机器人设计与早期康复训练仿真
2022-01-05杨中原崔冰艳张祥邓嘉
杨中原,崔冰艳,张祥,邓嘉
(华北理工大学 机械工程学院,河北 唐山 063210)
引言
踝关节是人体最重要的运动关节之一,与人们日常生活密切相关[1],踝关节在人行走、奔跑、跳跃过程中承载大部分的身体体重,在运动中起到保持平衡的重要作用,是人体下肢关节中易损伤部位[2]。目前,踝关节损伤的康复治疗大多是康复医疗师指导下进行的康复训练[3],康复训练时使用传统的弹力带来锻炼肌肉力量及踝关节活动度,使用平衡球等来锻炼关节的平衡能力,如今康复机器人凭借其自动化、定量化、精确化等特点,开始逐渐挑战传统的物理和作业疗法[4]。
在国内,王海芳等[5]提出一种并联的3自由度3-SPS/S踝关节康复机器人,用于踝关节的康复训练,实现了不同的训练模式。Jian feng, Li等[6]研制了2-UPS/RRR并联踝关节康复机器人,进行了运动学标定,提高了运动学模型的控制精度,可以使踝关节运动时肌肉张力保持最佳状态。Von Teh Cheryl Yi等[7]提出一种基于四自由度滑轮驱动的并联机构踝关节机器人,可较好地完成踝关节的康复训练,具有成本低、使用方便、便携性高、驱动能力强等特点。
依据踝关节的解剖学特点,提出一种2UU-UPU三自由度踝关节康复机器人,建立虚拟样机,进行踝关节的跖屈、背屈和内外翻3种典型的康复训练仿真。
1 踝关节的生理结构特点及康复方法
1.1 踝关节的结构特征及其损伤原因
踝关节是一个单轴的关节,主要由胫骨、腓骨下端的关节面与距骨滑车构成。踝关节的活动方式主要有:背屈、跖屈、内翻、外翻4种运动方式。足尖向上(钩脚尖),足与小腿间的角度小于90°叫背屈;足尖向下(绷脚尖),足与小腿间的角度大于直角叫做跖屈。在跖屈时,足可做一定范围的侧方运动[8]。正常人一般可以背屈20~45°,跖屈45~30°,活动空间大约有90°;两脚自然放松,两脚心相对就是内翻,反之则是外翻,正常人内翻大约40°,外翻大约30~35°。
踝关节发生损伤的原因除突发事件,如磕绊、跌倒造成的扭伤外,大多数损伤发生在运动过程中。运动之前准备活动不足,肌肉组织的弹性和伸展性会受到很大限制[9],踝关节附近小腿三头肌、胫骨前肌、廻长屈肌、第三腓骨肌等肌肉在没有做好充分准备活动时,肌肉组织的粘滞性会大大限制肌腱和韧带的灵活性。
1.2 康复方法
踝关节的康复方法根据患者的损伤程度而有所不同。踝关节损伤较轻的患者主要康复方法是保守治疗,通过针灸按摩、推拿理疗、口服和喷涂药物等方法,缓解因外力造成的踝关节内部出血和肿胀,同时应该按照PRICE原则(protection保护,rest制动,ice冰敷,compression加压,elevation抬高)指导患者[10]进行康复。
对于韧带断裂、跟腱断裂的患者则需采取手术治疗,术后应进行积极的康复训练,训练初期主要为小幅度的屈伸练习,使关节灵活性逐渐提升;训练中期可以进行跖屈和内、外翻练习,并逐渐进行踝关节各平面内的转动练习;训练后期开始进行渐进式的肌力训练、平衡训练,可使用传统的训练方法如:弹力带抗阻踝外翻、抗阻足内翻、抗阻勾脚、抗阻绷脚、踩平衡球等。恢复正常行走后,在日常的行走和体育锻炼中,Myer等[11]对踝关节平衡稳定性的研究表明,通过增强式的运动训练可以大幅减小垂直起跳时最大踝关节外翻角,降低踝关节再次损伤的风险。
2 踝关节康复机器人的结构设计
2.1 机构原型
基于踝关节的生理结构及康复方法,为满足其背屈、跖屈、内翻、外翻运动的设计要求,提出一种基于2UU-UPU并联机构的踝关节康复机器人,机构简图如图1所示。该机构含有3条支链,由2条相同的UU支链,1条UPU支链构成,可以沿Z轴上下移动,绕Y轴转动,绕X轴转动,具有3个自由度。设计中,电机安装在静平台上,用来驱动虎克铰链,降低了装置的重心,减轻了整个支链的质量和惯性力产生的惯性冲击。

图1 机构简图
2.2 踝关节的机构设计
针对并联机构的特点与踝关节的生理特征,采用Solidworks三维模型软件,对踝关节康复机器人建模,如图2所示。为了反映康复训练的场景,图3给出了踝关节康复机器人的坐姿穿戴示意图。

图2 踝关节康复机器人模型图

图3 踝关节康复机器人穿戴示意图
踝关节康复机器人的静平台采用钢材料(密度7.85 g/cm3),能够保证其坚固稳定;考虑到轻量化,减轻电机负担,以及整体并联机构的灵活性,3条支链、动平台以及脚托部分使用铝合金材料(密度2.74 g/cm3)。
由于不同年龄、不同性别患者的脚大小不同,针对不同患者的踝关节康复需要,该机构在动平台上安装了可换脚托(1),为使患者使用时更加舒适,脚托周围采用软海绵垫包裹;脚托上方设计有固定绑带,防止患者在康复训练时产生松动。支链1为UPU支链,支链2、3为UU支链,通过伺服电机(3)驱动,由于支链1的杆长是随着机构的运动而不断变化的,定义支链1的杆长l1最短为500 mm,最长为800 mm,支链2和支链3长度相等,均定义为500 mm,静平台与动平台均为直径为300 mm的圆内接等边三角形,静平台和动平台上的U副在直径为220 mm的圆内接等边三角形顶点上,规定支链1上电机为电机1,支链2上电机为电机2,支链3上电机为电机3。
3 运动学仿真
建立三自由度踝关节康复机器人的虚拟样机,运用Adams仿真软件[12-13]进行模拟仿真,模拟踝关节康复机器人的康复运动轨迹,绘制末端执行器的位移、速度曲线。在踝关节康复初期,肌肉力量不足,踝关节附近肌肉长时间未受力活动导致肌肉僵硬,康复初期的康复训练以关节活动度训练为主。踝关节康复机器人的轨迹采用“渐进式”方式,对踝关节进行缓慢反复拉伸。在锻炼关节活动度的同时,慢慢唤醒僵硬的肌肉组织,实现踝关节康复运动。患者保持坐姿治疗减轻了患者康复训练时的痛苦,同时坐姿治疗使得治疗过程更加安全,避免患者造成二次损伤。
在康复初期训练中,踝关节康复机器人不能出现速度、加速度的突然变化,踝关节康复机器人的电机转角应缓慢、匀速变化,因此使用Step函数对机构进行仿真分析,机构可实现的踝关节活动度康复训练仿真分析如下(右脚为例)。
(1)坐姿状态下的内、外翻仿真分析
患者保持坐姿,右脚放在脚托上,支链1电机主动转动,支链2、3电机被动跟随。
对支链1上电机1添加驱动Motion1,使用Step函数对电机1进行控制,Step函数如下:
Step( time , 0 , 0d , 6 , 5d )+Step ( time , 6.01 , 0d , 12 , -10d )+Step ( time , 12.01 , 0d , 18 , 15d )+Step ( time , 18.01 , 0d , 24 , -20d )+Step ( time , 24.01 , 0d , 30 , 25d )
在0~6 s内,电机1从0°正转到5°,动平台带动踝关节做内翻运动,活动幅度为5°;在6~12 s内电机1从5°转到-5°,踝关节从内翻5°缓慢运动到外翻5°;在12~18 s内,踝关节从外翻5°缓慢运动到外翻10°;在18~24 s内,踝关节从外翻10°缓慢运动到内翻10°;在24~30 s内,踝关节从内翻10°缓慢运动到内翻15°。足内翻(图4a)、足外翻(图4b)的仿真示意图如图4所示。

图4 踝关节内、外翻示意图
坐姿状态下的内、外翻的动学分析曲线如图5所示。图中的位移、速度曲线呈正弦曲线变化,幅值不断增大,踝关节交替做内、外翻拉伸运动,并逐渐加大拉伸角度,整体仿真过程平稳。

图4 内、外翻运动学仿真曲线图
(2)坐姿状态下的跖屈仿真分析
患者保持坐姿,支链2、3电机向前转动,支链1电机向右转动,患者右脚被动做跖屈动作,足跖屈的仿真示意图如图6所示。
对支链1、2、3上电机分别添加驱动:
电机1:Step( time , 0 , 0d , 6 , 10d )+Step( time , 12.001 , 0d , 18 , 5d ) + Step ( time , 24.001 , 0d , 30 , 5d )
电机2:Step ( time , 0 , 0d , 6 , 10d )+ Step ( time , 6.001 , 0d , 12 , -5d )+ Step ( time , 12.001 , 0d , 18 , 10d )+Step( time , 18.001 , 0d , 24 , -10d )+Step( time , 24.001 , 0d , 30 , 10d )
电机3:Step( time , 0 , 0d , 6 , 10d )+ Step ( time , 6.001 , 0d , 12 , -5d )+ Step ( time , 12.001 , 0d , 18 , 10d )+ Step ( time , 18.001 , 0d , 24 , -10d )+ Step ( time , 24.001 , 0d , 30 , 10d )
电机1在0~6 s向右旋转10°,12~18 s内向右旋转5°,24~30 s内向右旋转5°。相对应的支链1从垂直位置依次分阶段向右旋转10°、5°、5°,支链1最终位置在Z轴方向上与初始位置夹角20°。
电机2与电机3运动函数相同,在0~6 s内向前旋转10°,6~12 s内向后旋转5°,12~18 s内向前旋转10°,18~24 s内向后旋转10°,24~30 s内向前转动10°。支链2、3从垂直位置依次向前10°、后5°、前10°、后10°、前10°,支链2、3最终位置在Z轴方向上与初始位置的夹角为15°。

图6 足跖屈示意图
跖屈位移曲线图如图7(a)所示。机构先向右前、再向后、再向右前,整体做往复运动,对患者关节进行反复缓慢拉抻。跖屈仿真曲线如图7所示,从图中可以看出,该机构在跖屈康复运动过程中,3个方向的位移轨迹、质心速度曲线平稳,无明显拐点,能够满足踝关节初期康复小幅度往复运动的特点要求,可以达到康复训练的效果。

图7 跖屈仿真曲线
(3)坐姿状态下的背屈仿真分析
因为踝关节背屈活动度练习比较困难,康复机器人模拟传统踝关节背屈练习办法,缓慢加大康复角度,并在最大角度保持,使得跟腱得到充分拉伸,达到最理想的康复效果。在康复时患者保持坐姿,支链2、3电机向后转动,支链1电机被动跟随,患者右脚可做一定角度的牵引式背屈运动。由于踝关节后方连有跟腱,作为人体最粗最大的肌腱之一,是比较难康复的角度,所以可以适当加大点击转角,对支链1、2、3上电机分别添加驱动:
电机1:Step ( time, 0, 0d, 6, -10d )+ Step ( time, 18.001, 0d, 24,-10d ) +Step( time, 36.001, 0d , 42 , -10d )
电机2:Step( time, 0, 0d, 6, -20d )+ Step ( time, 12.001, 0d, 18, 20d )+ Step ( time, 18.001, 0d, 24, -25d )+ Step ( time, 30.001, 0d, 36, 25d )+ Step ( time,36.001, 0d, 42, -30d )
电机3:Step( time, 0, 0d, 6, -20d )+ Step ( time, 12.001, 0d, 18, 20d )+ Step ( time, 18.001, 0d, 24, -25d )+ Step ( time, 30.001, 0d, 36 , 25d )+ Step ( time,36.001, 0d, 42, -30d )
电机1在0~6 s向左旋转10°,18~24 s内向左旋转10°,36~42 s内向左旋转10°。支链1从垂直位置依次分阶段向左旋转10°,支链1最终位置在Z轴方向上与初始位置夹角30°。电机2与电机3运动函数相同,在0~6 s内电机向后旋转20°并保持6 s,12~18 s内向前旋转20°还原到初始位置,18~24 s内向后旋转25°并保持6 s,30~36 s内向前旋转25°还原到初始位置,36~42 s内向后转动30°。足背屈仿真示意图如图8所示,背屈仿真曲线如图9所示。

图8 足背屈示意图
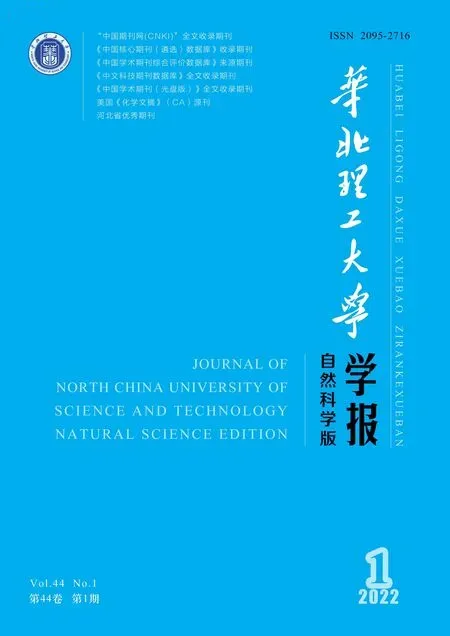
图9 背屈仿真曲线图
对背屈位移曲线图9(a)进行分析,可以看出,位移曲线变化平稳,过渡处圆滑,达到最大背屈时,机构停止期运行平稳,没有出现多余的震动。从末端执行器质心速度曲线图9(b)中可以看出,每个阶段的速度曲线呈二次函数变化,没有出现跳点,整体运行平稳。
4 结论
(1)在两转一移并联机构2UU-UPU机构的基础上设计一种踝关节康复机器人,对该结构的具体参数进行了定义,通过三维模型软件对其进行建模,该机构能实现绕X、Y轴转动和Z轴方向上的移动。
(2)通过Adams软件对踝关节康复机器人背屈、跖屈、内外翻的康复训练过程进行运动学分析,使用Step函数设计了虚拟康复轨迹,从仿真图像可以看出,康复机器人运动轨迹平滑、速度曲线平顺,能够较好地实现踝关节背屈、跖屈、内外翻的康复训练运动,满足初期康复训练要求,且具有较好的稳定性,运动过程中未出现跳点,符合人体踝关节的运动规律,验证了康复机器人在初期康复功能实现上的合理性。